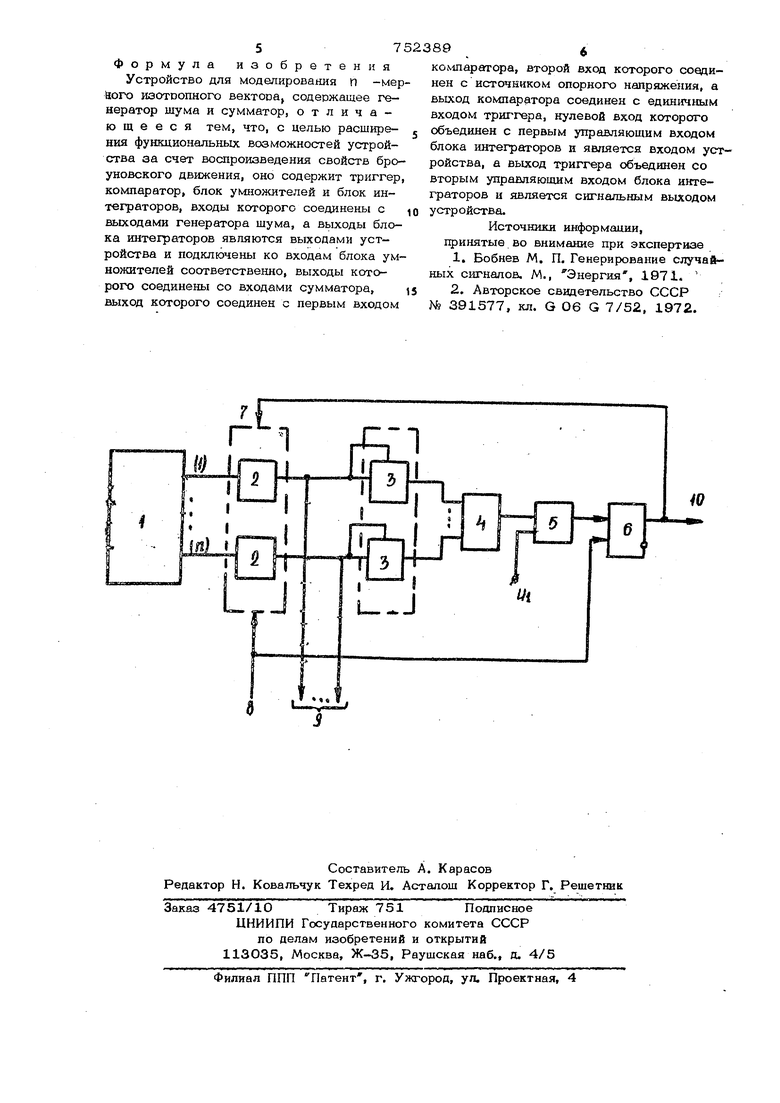
воспроизведения свойств броуновского дви жешш. Для достижения постаБленной цели в устройство для модел фования п -мерного изотропного вектора, содержащее генератор шума, сумматор, введены триггер, компаратор, блок умножителей и блок интеграторов, входы KOTOpoio соединены с выходами генератора шума, а выходы бло ка 1ште1раторов являются выходами устройства подключены ко входам блока умножителей соответстве шо, выходы которого соединены со входами сумматора, выход которого соединен с первым входом компаратора, второй вход которого соединен с источником опорного напряжения, а выход компаратора соединен с единичным входом триггера, нулевой вход которого объединен с первым управляющим входом блока интеграторов и является входом устройства, а выход триггера объединен со вторым управляющим входом блока 1штеграторов и является сигнальным выходом устройства. Блок-схема предлагаемого устройства модел1фования П -мерного изотропного вектора, приведенная на чертеже, содержит генератор 1 шума с п некоррелиро ва1шыми каналами, блок п интеграторов 2., блок П умножителей 3, сумматор 4, компаратор 5, триггер 6, первый и второй управляющие входы 7,8 блока П интеграторов 2, rpyniQr п выводов 9, яв ляющихся выходами устройства, сигнальHt-ffl вывод 10. Выходы генератора 1 шума гюдключ€ ны к выходам блока п интеграторов 2 выходы блока п интеграторов 2 подключе {ы к входам блока п умножителей 3 и к п выводам 9, выходы блока п умножителей 3 подключены к входам сумма тора 4, выход сумматора 4 подключен к первому входу компаратора 5, вькод ко параторам 5 подключен к единичному вхо
ду триггера 6, едини1ный выход триггера 6 подключен к первому управляющему входу 7 блока П интеграторов 2 и к сиг«йальному выводу Ю. Устройство работает следующим образом. На второй управляющий вход 8 блока П интеграторов подается управляющий им пульс, переводящий интеграторы в реямм интегрирования, с предварительной устано кой на них нулевых начальных условий, и устанавливакжций триггер 6 в нулевое состояние.
но сравнению, например, с гипотетическим специализированным моделирующим вычислительным устройством, реализующим известный метод выборок Начинается интегрирование п некорреированных сигналов белого шума, постуающих на входы блока ti интеграторов 2. Напряясения.вырабатьгааемые на выхо- ах интеграторов, соответствуют коордиатам частицы, совершающей броуновкое дв11жение из центра сферы с единичым радиусом. С помощью блока п уможителей 3 и сумматора 4 определяется вадрат расстояния блуждаюодей частицы т центра сферы -.51 Е которое сравниается с единицей компаратором 5, на перый вход которого поступает напряя ение, ропорциональное ,Ё1 а на второй вход одается единичное напряжение U j. . Блуждание частицы продолжается до выхода ее на поверхность сферы, когда 21 & j 1. Этот момент фиксируется компаратором 5, сигнал с выхода которого поступает на единичный вход триггера 6, переводя его в единичное состояние. Сигчал с един1гчного выхода триггера б поступает одновременно по цепи обратной связи на первый управляющий вход 7 блока п интеграторов 2, переводя их в реJKHM запоминания, и на сигнальный вывод lOj оповещая об окош{а1ши процесса формирования координат единичного П -меркого изотропного вектора, представляемых в данный момент напряжениями на группе п выводов 9. Эти напряжения подаются или на входы соответствующих блоков специализированной гибрвдной вычислительной системы, или в универсальную цифровую вьнислительную мащину - по ее каналам связи с внешнн ш устройствами. Для моделирования следующих случайных п -мерных векторов процесс повторяется соответствующее число раз в той же последовательности. Предлагаемое устройство для моделирования п -мерного изотропного вектора обладает более высоким быстродействием Анализ показывает, что среднее время моделирования одного п -мерного вектора предлагаемым устройством с равномерностью распределе1шя, удовлетворяюшей практике решения краевых задач, при полосе частот генератора белого (O-S мГц в соответствии с техническими возможностями современной элементной базы) не превьпиает О,1 мс. 57 формула изобретения Устройство для моделирования п -мер його иаотоопного вектооа, содержащее генератор шума и сумматор, отличающееся тем, что, с целью расширения функциональных возможностей устройства за счет воспроизведения свойств броуновского движения, оно содержит триггер компаратор, блок умножителей и блок интеграторов, входы которого соединены с выходами генератора шума, а выходы блока интеграторов являются выходами устройства и подключены ко входам блока умножителей соответственно, выходы которого соединены со входами сумматора, выход которого соединен с первым входом 89 кс шаратора, второй вход которого соединен с источником опорного напряжения, а выход компаратора соединен с единичным входом триггера, нулевой вход которого объединен с первым управляющим входом блока интеграторов н является входом устройства, а выход триггера объединен со вторым управляющим входом блока интеграторов и $шляется сигнальным выходом устройства. Источники информации, принятые во внимание при экспертизе 1.Бобнев М. П. Генерирование случайных сигналов, М., Энергия, 1971. 2,Авторское свидетельство СССР № 391577, кл. G Об G 7/52, 1972.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вероятностное вычислительное устройство для решения трехмерных краевых задач | 1978 |
|
SU767785A1 |
| Устройство для моделирования случайных блужданий | 1981 |
|
SU999063A1 |
| АДАПТИВНАЯ АНТЕННАЯ РЕШЕТКА | 1995 |
|
RU2099838C1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ РАДИОТЕХНИЧЕСКОЙ СИСТЕМЫ ПЕРЕДАЧИ ИНФОРМАЦИИ С АМПЛИТУДНО-ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ | 1991 |
|
RU2042194C1 |
| Устройство для приема и градиентного декодирования избыточных сигналов | 1983 |
|
SU1152016A1 |
| Преобразователь код-напряжение | 1988 |
|
SU1508348A1 |
| СПОСОБ И УСТРОЙСТВО АДАПТИВНОЙ ПРОСТРАНСТВЕННОЙ ФИЛЬТРАЦИИ СИГНАЛОВ | 1998 |
|
RU2141706C1 |
| ДЕМОДУЛЯТОР ФАЗОМАНИПУЛИРОВАННЫХ СИГНАЛОВ | 2008 |
|
RU2393641C1 |
| Цифровой фильтр | 1990 |
|
SU1739483A1 |
| ЦЕЗИЕВЫЙ СТАНДАРТ ЧАСТОТЫ | 1994 |
|
RU2076411C1 |
