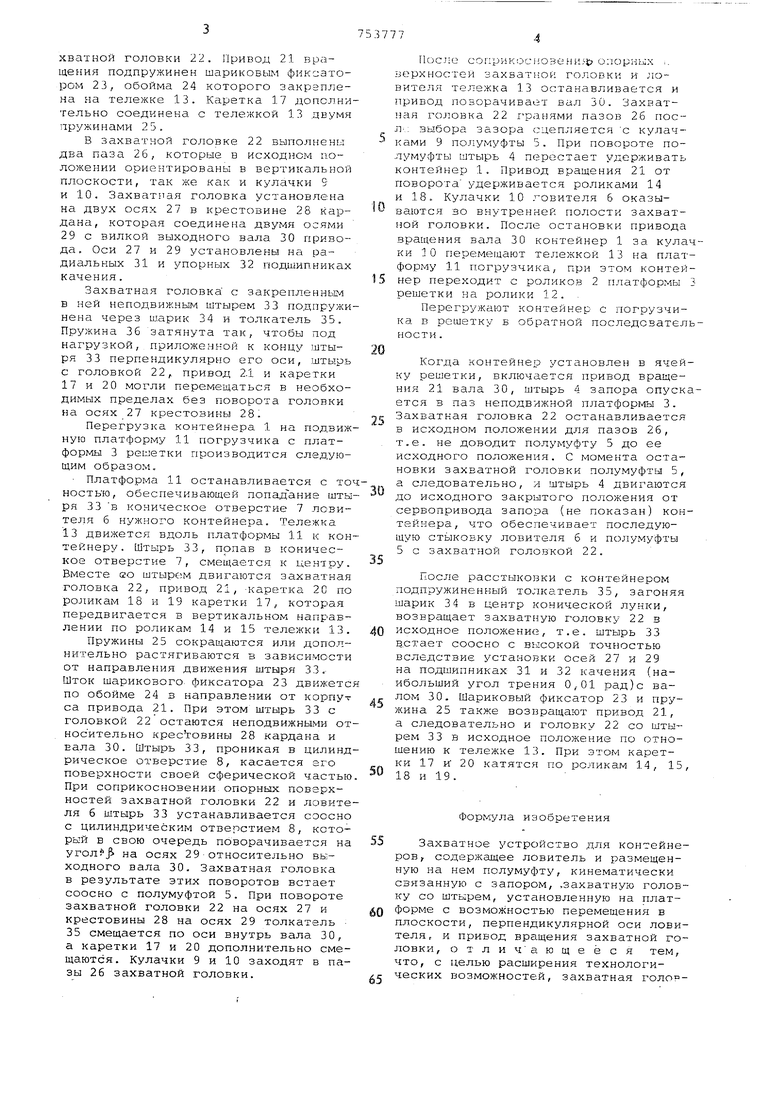
Изобретение относится к подъемнотранспортному машиностроению, а имен но к захватным устройствам. Известно захватное устройство для контейнеров, содержащее ловитель и размещенную на нем полумуфту,кинематически связанную с запором, захватную головку со штырем, установленную на платформе с возможностью перемещения в плоскости, перпендикулярной оси ловителя, и привод вращения захватной головки 1} . Однако известное устройство не обеспечивает надежного захватывания контейнера. Цель изобретения - повышение надежности и расширение технологических возможностей устройства. Достигается это тем, что захватная головка соединена с приводом вра щения посредством карданного шарнира а соосно штырю установлен фиксатор, воздействующий на захватную головку. На фиг. 1 показана схема перегруз ки контейнера из ячейки решетки на платформу погрузчика, на фиг. 2 - узел Т на фиг. Ij на фиг. 3 - узел N на фиг. 1; на фиг. 4 - вид А фиг. 1; .на фиг. 5 - вид Б фиг. 1, на фиг. б - разрез В-В фиг. 1; на фиг. 7 - разрез Г-Г фиг. 6.. Контейнеры 1 установлены в ячейках решетки на роликах 2 платформы 3. От смещения под действием сил Р контейнеры удерживаются подвижным штырем 4 запора, кинематически связанного с кулачковой полумуфтой 5, которая установлена на неподвижном ловителе 6 с возможностью вращения, В ловителе имеются коническое 7 и цилиндрическое 8 отверстия. Кулачки 9 полумуфты 5 и кулачки 10 ловителя 6 на всех контейнерах расположены в вертикальной плоскости. На подвижной в горизонтальном и вертикаль.чом направлениях платформе 11 погрузчика закреплены ролики 12.. Тележка 13 имеет возможность перемещения вдоль платформы 11. К тележке прикреплены оси роликов 14 и 15, на которых установлены направляющие 16 каретки 17, имеющей возможность перемещения в вертикальном направлении. К каретке 17, в свою очередь, прикреплены оси роликов 18 и 19, на которых с возможностью перемещения в горизонтальном направлении установлена каретка 20 с приводом 21 вращения захватной головки 22. Привод 21 вращения подпружинен шариковым фиксатором 23, обойма 24 которого закрзплена на тележке 13. Каретка 17 дополнительно соединена с тележкой 13 двумя пружинами 2 5.
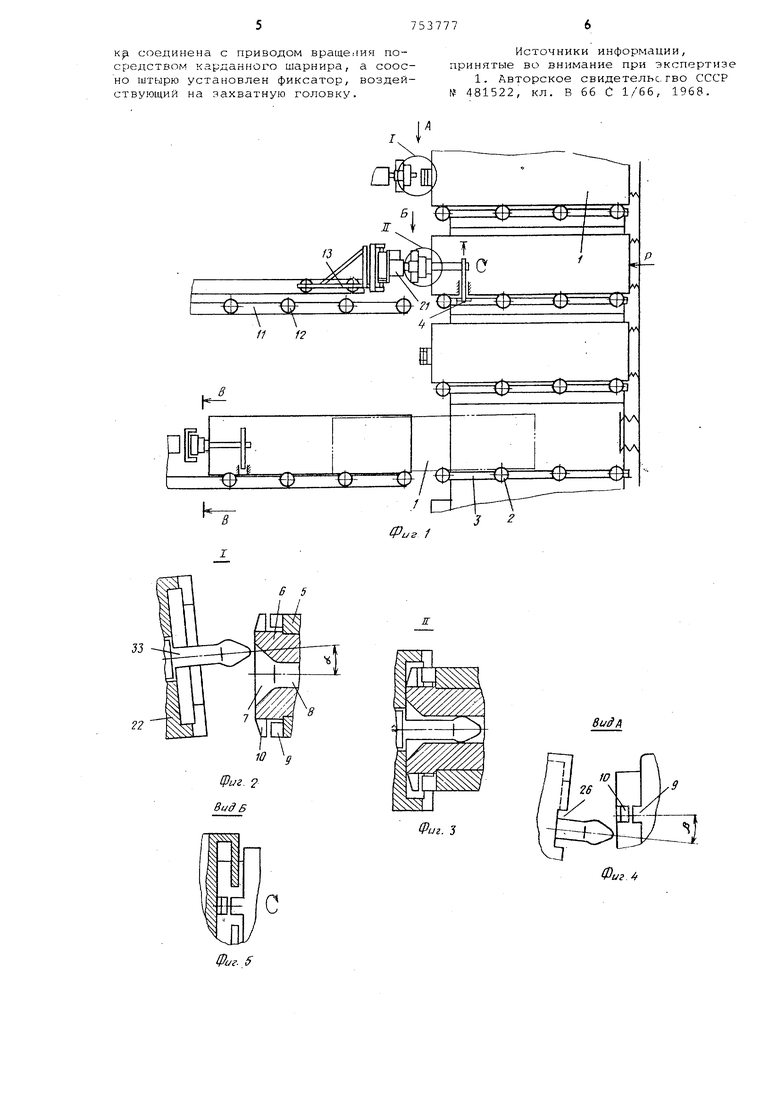
В захватной головке 22 вьлполненЕл два паза 26, которые в исходном положении ориентированы в вертикальной плоскости, так же как и кулачки 9 и 10. Захватная головка установлена на двух осях 27 в крестовине 28 кардана, которая соединена двумя осями 29 с вилкой выходного вала 30 привода. Оси 27 и 29 установлены на радиальных 31 и упорных 32 подшипниках качения.
Захватная головка с закрепленным в ней неподвижнь л штырем 33 подпружинена через шарик 34 и толкатель 35. Пружина 36 затянута так, чтобы под нагрузкой, приложенной к концу штыря 33 перпендикулярно его оси, штырь с головкой 22,, привод 2.1 и каретки 17 и 20 могли перемещаться в необходимых пределах без поворота головки на осях 27 крестовины 28.
Перегрузка контейнера 1 на подвижную платформу 11 погрузчика с платформы 3 решетки производится следующим образом.
Платформа 11 останавливается с тоностью, обеспечивающей попад ание штыря 33 в коническое отверстие 7 ловителя б нужного контейнера. Тележка 13 движется вдоль платформы 11 к контейнеру. Штырь 33, попав в коническое отверстие 7, смещается к центру. Вместе его штырем двигаются захватная головка 22, привод 21, -каретка 20 по роликам 18 и 19 каретки 17, которая передвигается в вертикальном направлении по роликам 14 и 15 тележки 13. Пружины 25 сокращаются или дополнительно растягиваются в зависимости от направления движения штыря 33. Шток шарикового, фиксатора 23 движетс по обойме 24 в направлении от корпут са привода 21. При этом штырь 33 с головкой 22 остаются неподвижными относительно кресговины 28 кардана и вала 30. Штырь 33, проникая в цилиндрическое отверстие 8, касается его поверхности своей сферической частью При соприкосновении опорных поверхностей захватной головки 22 и ловителя 6 штырь 33 устанавливается соосно с цилиндрическим отверстием 8, который в свою очередь поворачивается на на осях 29 относительно выходного вала 30. Захватная головка в результате этих поворотов встает соосно с полумуфтой 5. При повороте захватной головки 22 на осях 27 и крестовины 28 на осях 29 толкатель 35 смещается по оси внутрь вала 30, а каретки 17 и 20 дополнительно смещаются. Кулачки 9 и 10 заходят в пазы 26 захватной головки.
После coripi-iKociiOBeHi;;-) опорных i. верхносгей захватной головки и ловителя тележка 13 останавливается и привод поворачивает вал 30. Захватная головка 22 г-ранями пазов 26 посЛ: выбора зазора сцепляется с кулачками 9 полумуфты 5. При повороте полумуфты штырь 4 перестает удерживатг контейнер 1. Привод вращения 21 от поворота удерживается роликами 14
Кулачки 10 говителя 6 оказываются во внутренней полости захватной головки. После остановки привода вращения вала 30 контейнер 1 за кулачки 10 перемещают тележкой 13 на платформу 11 погрузчика, при этом контейнер переходит с роликов 2 платформы 3 решетки на ролики 12. .
Перегружают контейнер с погрузчика в решетку в обратной последовательности .
Когдда контейнер установлен в ячейку решетки, включается привод вращения 21 вала 30, штырь 4 запора опускается в паз неподвижной платформы 3. Захватная головка 22 останавливается в исходном положении для пазов 26, т.е. не доводит полумуфту 5 до ее исходного положения. С момента остановки захватной головки полумуфты 5, а следовательно, и штырь 4 двигаются до исходного закрытого положения от сервопривода запора (не показан) контейнера, что обеспечивает последующую стыковку ловителя 6 и полумуфты 5 с захватной головкой 22.
После расстыковки с контейнером подпружиненный толкатель 35, загоняя шарик 34 в центр конической лунки, возвращает захватную головку 22 в
0 исходное положение, т.е. штырь 33 встает соосно с высокой точностью вследствие установки осей 27 и 29 на подшипниках 31 и 32 качения (наибольший угол трения 0,01 рад)с ва, лом 30. Шариковый фиксатор 23 и пружина 25 также возвращают привод 21, а следовательно и головку 22 со штырем 33 в исходное положение по отношению к тележке 13. При этом каретки 17 и 20 катятся по роликам 14, 15,
0 18 и 19.
Формула изобретения
Захватное устройство для контейнеров, содержащее ловитель и размещенную на нем полумуфту, кинематически связанную с запором, .захватную головку со штырем, установленную на платформе с возможностью перемещения в плоскости, перпендикулярной оси ловителя, и привод вращения захватной головки, отличающеёся тем, что, с целью расширения технологических возможностей, захватная голорк соединена с приводом враще.пия посредством кардан 1ого шарнира, а соосно штырю установлен фиксатор, воздействующий на захватную головку.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельсгво СССР № 481522, кл. В 66 С 1/66, 1968.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для контейнеров с ловителем | 1977 |
|
SU726007A1 |
| Захватное устройство для контейнеров | 1978 |
|
SU905183A2 |
| Захватное устройство для контейнеров | 1979 |
|
SU887420A2 |
| Кран-штабелер для загрузки иРАзгРузКи КОНТЕйНЕРОВ | 1978 |
|
SU819016A1 |
| Захватное устройство для контейнеров | 1978 |
|
SU880947A2 |
| Автомат для обработки электромонтажных проводов | 1990 |
|
SU1837371A1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ ТРАНСПОРТНО-ПУСКОВЫХ КОНТЕЙНЕРОВ ПРЕИМУЩЕСТВЕННО ДЛЯ ОРУЖИЯ ТИПА ТОРПЕДЫ НА ПУСКОВУЮ УСТАНОВКУ КОРАБЛЯ | 2007 |
|
RU2337854C1 |
| Автомат для приварки к торцам труб элементов соединительной арматуры | 1974 |
|
SU640830A1 |
| Устройство для захвата и передачи штучных грузов с конвейера на конвейер | 1977 |
|
SU663644A1 |
| Стенд для сборки и разборки прокатных валков | 1981 |
|
SU1186300A1 |
3 2
в 5
SL
ВидА
Фиг. 3
Фиг Л
