1
Изобретение относится к оборудованию складов и может быть использовано для обслуживания многоярусных наклонных стеллажей с контейнерами, которые снабжены замками.
Известен кран-штабелер, содержащий установленную на горизонтальные направляющие самоходную опорную конструкцию с вертикальными колоннами, в которых подвижно установлена грузоподъемная платформа, снабженная грузозахватным устройством 1.
Однако известный кран не может обслуживать наклонные стеллажи.
Известен крап-щтабелер для загрузки и разгрузки контейнеров, установленных на наклонных полках многоярусных стеллажей, содержащий установленную на направляющие самоходную опорную конструкцию с колоннами, на которых подвижно установлена грузоподъемная платформа, снабженная приводным грузозахватным устройством 2.
Этот кран может разгружать наклонные стеллажи. Однако он не обеспечивает надежной работы при загрузке и разгрузке тяжелых крупногабаритных контейнеров, снабженных замками, поскольку он не имеет средств для отпирания замков упомянутых контейнеров и средств для приема
сигнала о том, в каком положении находится замок контейнера, для того, чтобы отвести грузозахватное устройство только тогда, когда контейнер будет полностью заперт на стеллаже.
Целью изобретения является расщирение технологических возможностей за счет загрузки и разгрузки контейнеров с замками. Это достигается тем, что кран-щтабелер
снабжен отпирающим механизмом для открытия замка контейнера и датчиком положения контейнера, установленными на грузозахватном устройстве и связанными с приводом последнего.
Отпирающий механизм может содержать поворотную относительно горизонтальной оси кулачковую полумуфту, внутри которой расположен щтырь с конусным наконечником для взаимодействия с замком контейнера. Опорная конструкция крана-щтабелера может быть снабжена упорами, взаимодействующими с направляющими, а грузоподъемная платформа - упорами, взаимодействующими с колоннами.
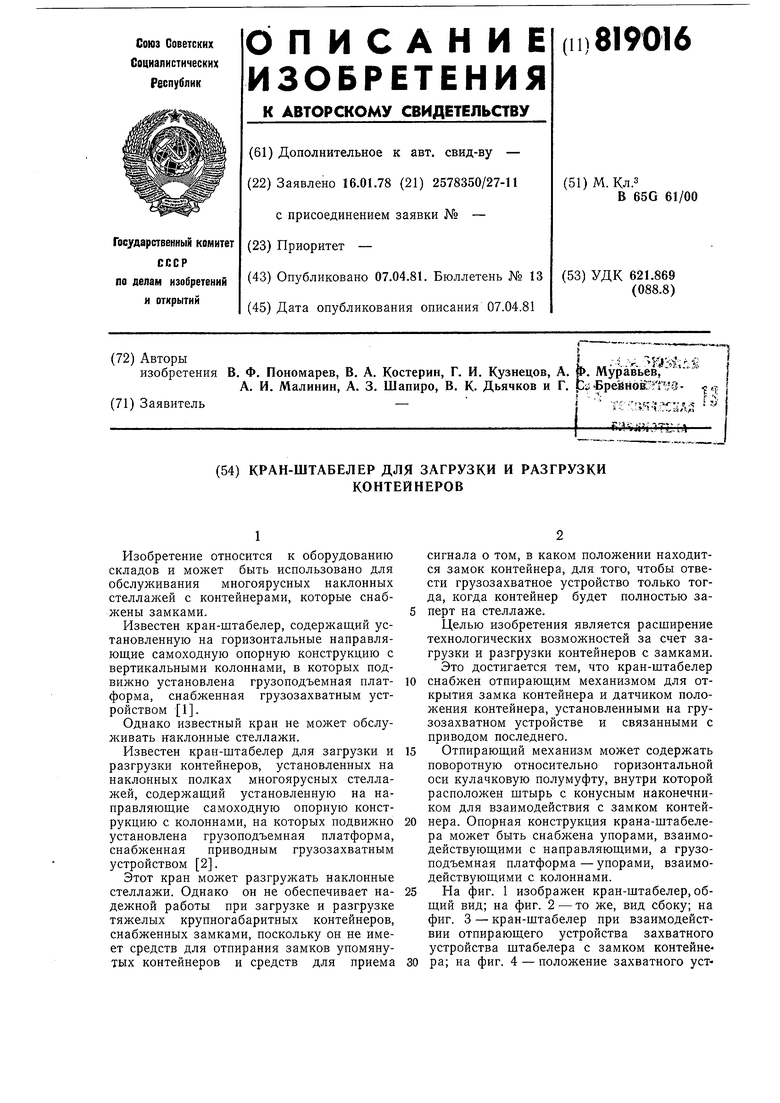
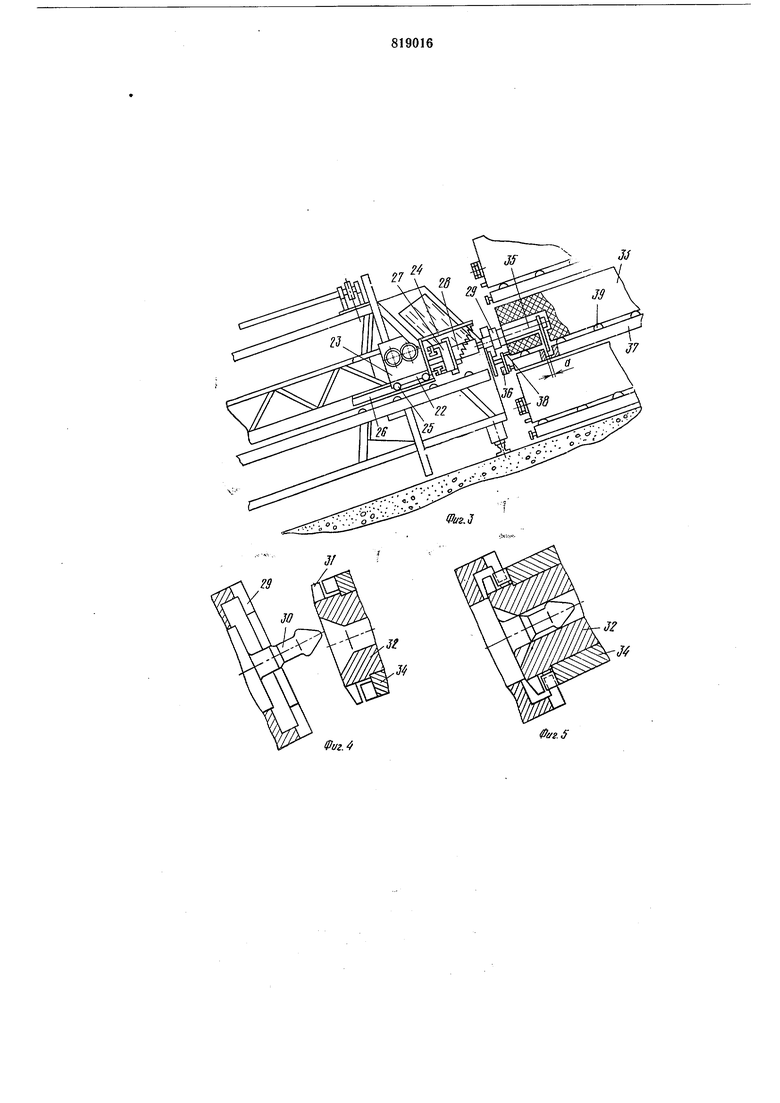
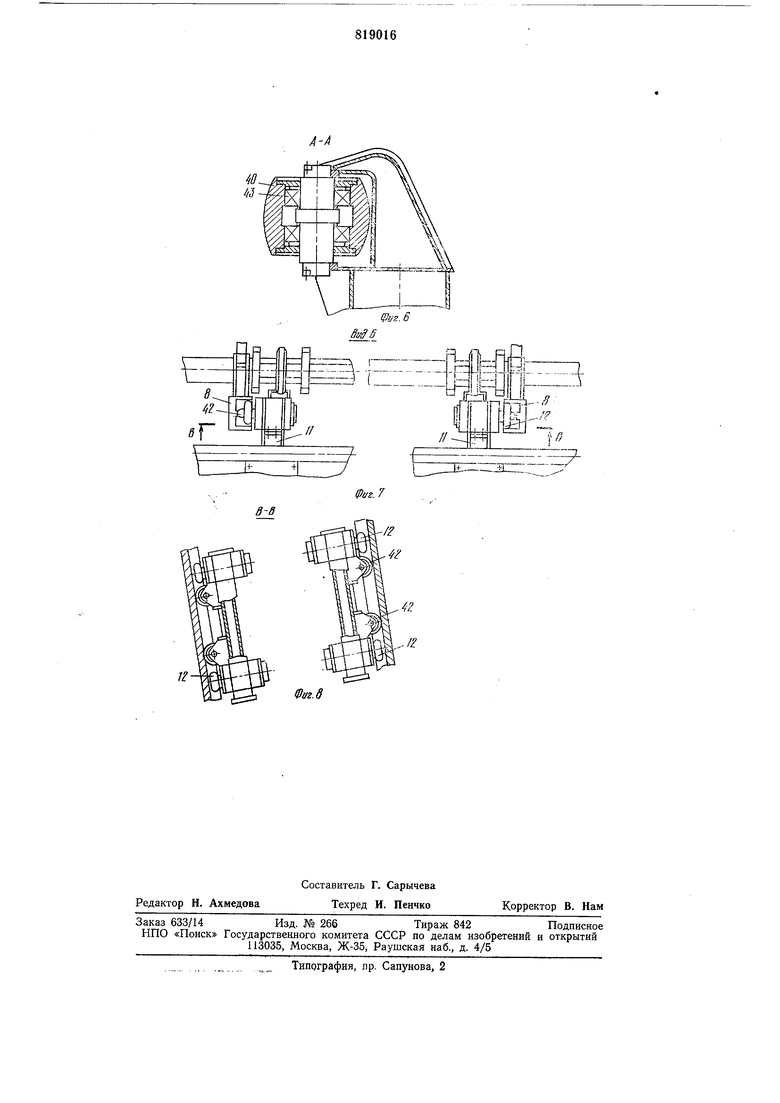
На фиг. 1 изображен кран-щтабелер, общий вид; на фиг. 2 - то же, вид сбоку; на фиг. 3 - кран-щтабелер при взаимодействии отпирающего устройства захватного устройства щтабелера с замком контейнера; на фиг. 4 - положение захватного устройства перед стыковкой с контейнером; на фиг. 5 - положение захватного устройства ири стыковке с контейнером; на фиг. 6 - разрез А-А фиг. 2; на фиг. 7 - вид Б фиг. 2; на фиг. 8 - разрез В-В фиг. 7.
Кран-штабелер содержит опорную конструкцию 1 с жестко прикрепленными к ней передней 2 и задней 3 концевыми балками, в которых установлено по два ходовых колеса 4 и 5. Колеса 5 задней концевой балки имеют реборду для предотвращения схода опорной конструкции с рельсов при аварийных ситуациях и соединены с приводами 6 передвижения штабелера по рельсовому пути, плоскость которого имеет боковой наклон к горизонту около 20°.
В передней части опорной конструкции 1 расположена кабина 7 для оператора, позволяющая вести управление с кабинного пульта и визуальный контроль за операциями съема и установки контейнеров. К опорной конструкции жестко прикреплены вертикальные колонны 8. Правая 9 и левая 10 грузовые платформы опираются на кронштейны 11, имеющие возможность перемещеиия по колоннам 8 на роликах 12 от привода 13 подъема. Кронштейны правой и левой илатформы попарно связаны между собой цепями 14, перекинутыми через ведущие 15, обводные 16 и ведомые 17 звездочки. Ведущие звездочки соединены зубчатыми муфтами 18 с трансмиссионными валами 19 и 20 с ириводом 13 подъема.
Ограничение подъема и опускаиия платформ 9 и 10 осуществляется концевыми выключателями и пружинными амортизаторами 21. На каждой грузовой платформе имеется тележка 22 с приводом 23 перемещения и захватным устройством 24, перемещающаяся на четырех ходовых роликах 25 по щвеллерам 26 грузовой платформы. Захватное устройство 24 состоит из механизма наведения 27, привода вращения 28 и отпирающего механизма 29, выиолненного в виде кулачковой полумуфты со штырем 30. В рабочем положении отпирающий механизм 29 связан с кулачками 31 ловителя
32контейнера 33 и кулачковой иолумуфтой 34, кинематически связанной с замком 35 контейнера 33.
На захватном устройстве 24 установлен датчик 36 положения контейнера, который обеспечивает срабатывание двух микропереключателей, один из которых дает команду на остановку тележки 22 при стыковке отпирающего механизма 29 с контейнером
33после его утапливания вглубь стеллажа 37 и появления зазора «а между замком
35 контейнера и гнездом стеллажа 37, а другой дает команду на отход тележки 22 после воздействия на него щтыря 38 сервомеханизма (не показан). Контейнер перемещается по роликам 39, установленным на грузовых платформах и стеллажах.
В связи с тем, что плоскость рельсового пути имеет боковой иаклои, опорная конструкция снабжена двумя упорами 40, контактирующими с боковым рельсом 41 сооружения, а на кронштейнах 11 грузовых платформ установлены упоры 42, контактирующие с вертикальными направляющими 8. Упоры 40 и 42 смонтированы на подщиппиках 43 и удерживают опорную конструкцию I и грузовые илатформы 9 и 10 от продольных перемещений. Кран-щтабелер снабжен датчиками положения крана-штабелера и грузоподъемной нлатформы относительно стеллал :ей, связанные с приводом перемещения крана-щтабелера и приводом подъема грузоподъемной платформы (не показаны).
Работа штабелера осуществляется следующим образом.
По рельсовому пути штабелер иодходит к стеллажу 37 с контейнером 33 так, что одна из грузовых платформ 9 и 10 останавливается с точностью, обеспечивающей попадание щтыря 30 в коническое отверстие ловителя 32 коитейнера 33. Тележка 22 с приводом 23 иеремещеиия и захватным устройством 24 движется вдоль грузовой платформы к контейнеру. При этом штырь 30 подходит к ловителю 32 контейнера 33 с возможным смешением и иерекосом их осей, сло кивщимся из допусти.мых погрешностей остановки штабелера и его грузовой платформы у данного контейнера. При стыковке с контейнером штырь 30, скользя своей конической частью ио конусу ловителя 32 контейнера, смещает иривод 28 вращения и от11ирающий механизм 29 по роликам кареток механизма наведения 27.
При входе в цилиндрическое отверстие ловителя 32 штырь 30 с отпирающим устройством 29 устанавливается соосно с ловителем 32 контейнера.
При дальнейшем двил :ении вперед отпирающий механизм 29 проходит своими прорезями над кулачками 31 ловителя 32, входит в зацепление с кулачковой полумуфтой 34 замка 35 контейнера 33 и движется до соприкосновения своей опорной поверхности с опорной поверхностью ловителя 32, после чего движется вместе с коитейнером до появления зазора «а между замком 35 контейнера и гнездом стеллажа 37. При образовании зазора срабатывает микропереключатель датчика 36 положения контейнера. При этом отключается привод 23 перемещения тележки 22 и включается привод 28 вращения отпирающего механизма 29. Поворачиваясь от привода вращения, отпирающий механизм поворачивает кулачковую полумуфту 34 и отпирает замок 35 контейнера, захватив при этом своим кольцевым пазом кулачки 31 ловителя 32. Отпирающий механизм 29 поворачивается на рабочий угол, после этого срабатывает микропереключатель захвятного органа и отключает привод 28 вращения отпирающего механизма, включив привод 23 перемещения телел ки 22 для возвращения ее назад. Привод 23 перемещения извлекает пристыкованный контейнер, который переходит с роликов 39 стеллажа 37 на такие же ролики грузовой платформы 9 или 10.
При установке контейнера 33 на стеллал 37 привод 23 перемещает его до срабатывания микропереключателя датчика 36 положения контейнера, который отключает привод 23 перемещения и включает привод 28 вращения отпирающего механизма 29. Отпирающий механизм 29 поворачивает кулачковую полумуфту 34 в обратную сторону до срабатывания микропереключателя захватного органа 24. При этом замок 35 контейнера запирается, и выключается привод 28 вращения. После запирания замка 35 из стеллажа 37 выходит штырь 38 сервомеханизма замка 35 контейнера и воздействует на датчик 36 положения контейнера, который включает привод 23 перемещения тележки для возвращения ее назад.
При отходе тележки 22 от контейнера захватное устройство 24 возвращается в исходное положение, при этом штырь 30 с отпирающим механизмом 29 располагается соосно с захватным устройством 24, привод 28 вращения и отпирающий механизм 29 возвращается по роликам кареток механизма наведения 27 в свободно подвешенное состояние.
Предлагаемый штабелер может быть использован для транспортировки, установки и съема модулей радиотелескопов и других антенных устройств.
Введение на захватном органе штабелера отпирающего механизма, датчики положения контейнера, связанного с приводом захватного устройства, упоров на опорной
конструкции и грузовых платформах обеспечивает нормальную работу штабелера на наклонном стеллаже.
Формула изобретения
1.Кран-штабелер для загрузки и разгрузки контейнеров, установленных на наклонных полках многоярусных стеллажей, содержащий расположенную на направляющих самоходную опорную конструкцию с колоннами, иа которых подвижно установлена грузоподъемная платформа, снабженная приводным грузозахватным устройством, отличающийся тем, что, с целью расширения технологических возможностей крана за счет загрузки и разгрузки контейнеров с замками, кран-щтабелер снабжен отпирающим механизмом для открытия замка контейнера и датчиком положения контейнера, установленными на грузозахватном устройстве и связанными с приводом последнего.
2.Кран-штабелер по п. 1, отличающийся тем, что отпирающий механизм содержит поворотную относительно горизонтальной оси кулачковую полумуфту, внутри которой расположен штырь с конусным наконечником для взаимодействия с замком контейнера.
3.Кран-штабелер по пп. 1 и 2, отлич ающийся тем, что опорная конструкция крана-штабелера снабжена упорами, взаимодействующими с направляющими, а грузоподъемная платформа - упорами, взаимодействующими с колоннами.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 348462, кл. В 65G 61/00, 1970.
2.Патент США № 3750804, кл. 216-16.4, 1973 (прототип).
/J
W
21
фиг. г
Фиг. 4
3J
J4
Фаг.$
fWEZB ..,.
.
| название | год | авторы | номер документа |
|---|---|---|---|
| Склад для хранения затаренных грузов (его варианты) | 1984 |
|
SU1217729A1 |
| Грузоподъемная площадка крана-штабелера | 1985 |
|
SU1283199A1 |
| Захватное устройство для контейнеров | 1977 |
|
SU753777A1 |
| Склад для хранения тонколистовых изделий | 1973 |
|
SU578222A1 |
| Склад для хранения шин | 1986 |
|
SU1404419A1 |
| Захватное устройство для контейнеров с ловителем | 1977 |
|
SU726007A1 |
| Грузоподъемная площадка крана-штабелера | 1986 |
|
SU1384503A2 |
| Кран-штабелер | 1985 |
|
SU1323472A1 |
| Автоматизированный участок механической обработки деталей | 1980 |
|
SU921790A1 |
| Склад для хранения длинномеров | 1989 |
|
SU1698149A1 |
Фаг. 8
