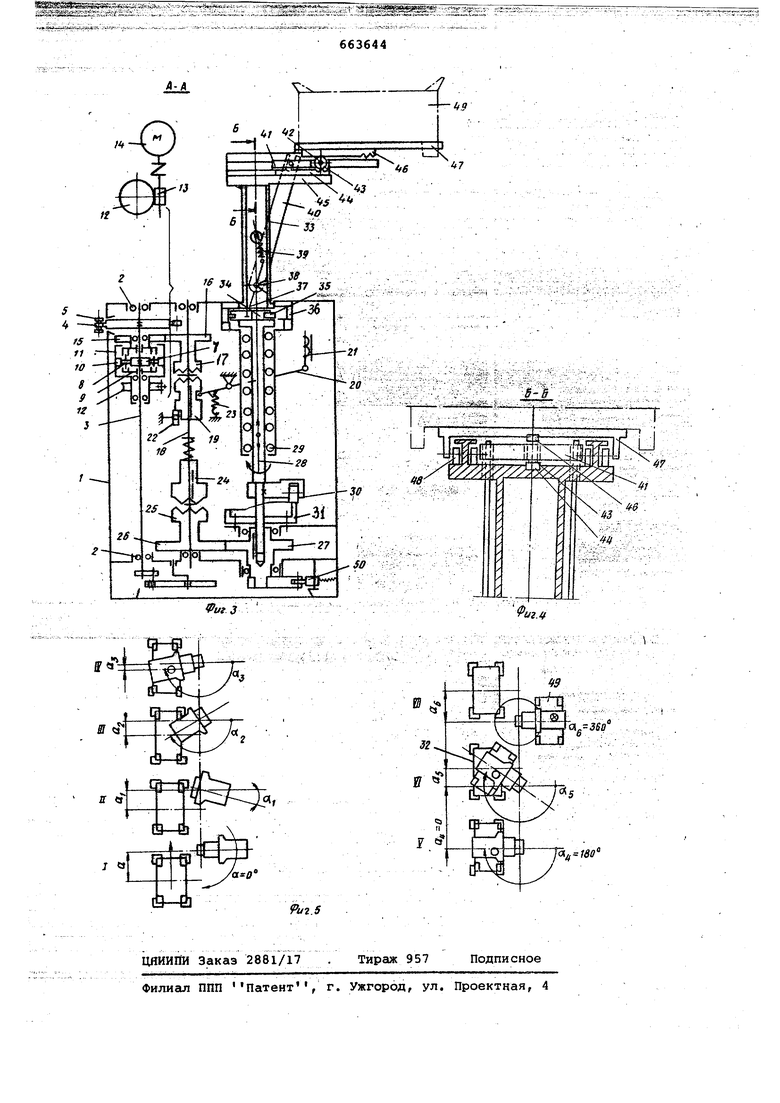
Изобретение отнооится к транспортным устройствам и может быть использовано для погрузки и разгрузки щелевого напольйого конвейера. Известно устройство для захвата и перегрузки изделий, включающее стойку с поворотнойв горизонтальной плоскости консолью, йесущий силовой цилиндр, со штоком которого связай захват для,штучных грузов, подпружинейную плиту, снабженную штангами, зажимные кулачки омонтирОванные на параллелограммном механизме и подпружиненные защелки 1. Однако с помощью этого устройства невозможно перегружать крупногабаритные грузы. Кроме того, оно ненадеж но в работе.-,:; Известно устройство для захвата и передачи 1аТучных грузов с койаейера на конвейер, преимущественно,С напольного, магистрального на от водящий, включающее установленный на вертикально-подвижной штанге захват.ный орган/ оснащенный механизмом синхронизации работы последнего с магистральным конвейером 2 . Недостатком известного устройств является то, что оно может захватывать и передавать только грузы,подл жащие кантованию в процессе, транспортировки. Целью настоящего изобретения является расширение технологических возможностей. .Поставленная цель достнгается тем, что в устройстве штанга размещена на поворотной пиноли, а захватный орган выгюлнен в виде платформы, на горизонтальных направляющих которой размещены телескопические салазки, взаийОдействуюгцйе посредством шарнирно- рычажной системы с копиром, размещенным на одном конце поворотной пинрли, на другом конце которой установлены то катель кулачка подъема (опускания) штанги и шестерня механизма синхронизации, причем механизм синхронизадии оснащен дифферейциальным приводом. На фиг.1-общий вид устройства; на фиг.2 - общий вид устройства в плане; на фиг.З - разрез А-А фиг.2; на фиг.4 - разрез Б-Б фиг.З; на фиг.5 схема синхроннойработы устройства с магистральным конвейером. Устройство для захвата и передачи штучных грузов с конвейера на конвейер, преимущественно с магистрального на отводящий содержит станину 1,.. В подшипниковых опорах 2 которой установлен вал 3 с закрепленной на нем приводной звездочкой 4,зацеплАощейся с тяговой цепью 5 щелевого конвейера 6. На валу 2 также закреплена центральная шестерня 7 планетарной передачи с сателлитами 8, опора кото рых находятся на водиле 9. Сателлиты 8 згщвпляются с шестерней 10 внут реннего зацепления, закрепленной на корпусе 11, на котором также закреплёно Червячное кЬлесо 12, зацепляющееся с червяком 13, получающим вращвн ё от 3-скоростного эле тродвигат .ля 14, На водиле 9 насажена шестерня 15, к6то$ ая зацепляется с шестерней 16, закрепленной на полумуфте 17 однооборотной кулачковой муфты свободно сидящей на валу 18. Вторая пол муфта 19 имеет гапоночное соединение с валом 18 и вводится в зацепление с полумуфтой 17 при рычага включения 20 от электромагнита 21. Ролик 22, упираясь в торец полумуфты 19, удерживает ее в зацеплении с полумуфтой 17 в течение одного оборота вала 18, пока полумуфта 19 при обесточенном электромагните 21 и под действием пружины 23 не западет свои пазом на ролик 22. Яа валу 18 насажена также кулачковая муфта, состоящ из подпружиненной полумуфты 24, имеющей с валом 18 шпоночное соедине ние и свободно сидящей на валу 18 полумуфты 25с шест ерн ей,2 6,з ацепляющейся с шестерней 27, в центральное отверстие которой входит гвострвая часть Пиноли 28. Пиноль 28 находится в шариковой опоре качения 29 станийы 1. На ней жестко закреплен толкатель 30, который своим роликом упирается в закрепленный соосно с пинолью 28, кулачок подъема (опускания) 31 fta ПОЗИЦИЙ разгрузки гружено тележки 32. К верхней части пиноли 28 крепится вертикальная штанга 33, в радиальном пазу которой нах:одится толкатель 34, упирающийся своими роликами 35 в копир 36. Двуплечий рычаг 37, закрепленный на валу 38, одним концом соединен с толкателем 34, cL другим концом упирается в пружину 39 для перекидки рычага 37. На валу 38, кроме того, закреплены два рычага 40, которые своими свобод ншк концами находятся в зацеплении с кареткой 41, на оси 42 которой сво 6ОД11О насажена шестерня 43, вхЬдйщая в зацепление с рейками салазок 44, размещенных .на платформе 45, и салазок 46, на кОторйх закреплена грузовая площадка 47. Перемещение каретки 41 и грузовой площгшки 47 в направляющих платфоркы 45 осуществляется на роликах 48. Для осуществления центрирования грузовой площадки 47 и груза 49 при йахМте последнего имеется механизм коррекции 50.
663644 Транспортное устройство работает следующим образом. При подходе груженой тележки 32 к позиции разгрузки, на расстоянии а по команде от электромагнита 21 включается однооборотная кулачковая муфта и полумуфта 19 сцепляется с полумуфтой 17. Вращение приводной звездочки 4 от тяго:вой цепи 5 щеле вого конвейера б передается через вал 3 на центральную шестерню 7, сателлиты 8, водило 9. При .этом шестерня 10 не вращается. Далее, шестерня 15 передает вращение через шестерню 16 и включенную однооборотную кулачковую муфту на вал 18. Ролик 22 удерживает полумуфту 19 во включенном положении при отключенном электромагните 21. Вал 18 передает вращение на кулачковую муфту с шестерней 26 И шестерню 27 на пиноль 28. При этом толкатель 30 взаимодействуя с кулачком подъема (опускания) 31, осуществляет вертикальное перемещение пиноли 28, а толкатель 34 - с копиром 36, через рычаги 37, 40, каретку 41, 2, салазки 44,46 осуществляет горизонтальное перемещение грузовой площадки 47. Направление перемещения груженой тележки 32 и вращения грузовой площадки 47 показаны в фиксированном положении 1 на Фиг,5. В положении 11 грузовая площадка 47 полностью вдвинута, В положении III грузовая площадка 47 вводится в зону расположения груза 49. В положении IV грузовая площадка 47 полнЬётью ёыдвйнута, начинается ее подъём для съема груза 49 с грузовой тележки 32. В положении V, когда совмещаются оси груза 49 и вращающейся грузовой площадки 47 происходит подъем ее и отрыеание груза 49 от тележки 32 щелевого конвейера 6. В этом положении корректор 50 довернет пиноль 28 до полбжения совпадения осей груза 49 на грузовой тележке 32 и грузовой площадке 47. В положении VI койЧаетсй подъем грузовой площадки 47, и дается команда на включение электродвигателя 14 на врааадение червячного колеса 12 в сторону, противоположную вращению вала 3. Электродвигатель 14 вначале включается .на большую, а потом на 15 ёйь1йую скорость вращения. При этом достигается уменьшение скорости вращения грузовой площадки 47 с установлё1 йым на нем грузом, что ведет к улюНьшению динамических усилий, когда в положении VII вследствие западания (под действием пружины 23) полумуфты 19 (своим пазом) на ролик 22,грузовая площадка 47 вместе с гРУзом 49 останавливается и опускает его на другой конвейер 51, а освобожденная грузовая .площадка 47 ждет новой команды. Создание вышеописанной кс струк1дии значительно повышает технологические возможности устройства для захвата и передачи грузов с конвейера на конве йер, позволяет перегружать грузы с возможным кантованием и грузы не под лежащие кантованию. Формула изобретения Устройство для захвата и передачи штучных грузов с конвейера на конвейер, преимущественно с напольного магистрального на отводящий, BKjno4aroщее установленный на вертикальноподвижной штанге захватный орган, оснащенный механизмом синхронизации работы последнего с магистральным конвейером, отличающееся тем, что, с целью расширения техноло663644гических возможностей устройства, штанга размещена на поворотной пиноли, а захватный орган выполнен в виде платфорг-ы, на горизонтальных направляющих которой размещены телескопические салазки, взаимодействующие, посредством шарнирно-рычажной с копиром, размещенным на одном конце поворотной пиноли, на другом конце которой установлены толкатель кулачка подъема (опускания) штанги и шестерня механизма синхронизации, а последний оснащен дифференциальным приводом. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 135405, кл. В 65 G 47/52, 1960, 2,Авторское свидетельство СССР 472080, кл.В 65 3 47/52, 1970.

| название | год | авторы | номер документа |
|---|---|---|---|
| Многопозиционный станок для отгибки фланцев и зиговки полых деталей из листового материала | 1982 |
|
SU1044382A1 |
| Тележечный конвейер | 1988 |
|
SU1578053A1 |
| МАШИНА ДЛЯ СШИВАНИЯ МАТОВ ДЕРЕВЯННЫХ СКЛАДНЫХяш,иков | 1969 |
|
SU251806A1 |
| ВСЕСОЮЗНАЯ ПАТЕНТйО-ТЕХпННЕСКА!!БИБЛИОТЕКА | 1971 |
|
SU306062A1 |
| Ротор для механической обработки заготовок | 1978 |
|
SU740479A1 |
| Загрузочное устройство | 1984 |
|
SU1222604A1 |
| Станок для точки кардной гарнитуры шляпок | 1954 |
|
SU100815A1 |
| Подвесная конвейерная система для транспортировки и взвешивания закрепленных на троллеях штучных грузов | 1976 |
|
SU612864A1 |
| Устройство для укладки в коробки штучных предметов | 1972 |
|
SU440304A1 |
| Установка для ассортиментного комплектования контейнеров лотками с хлебобулочными изделиями | 1974 |
|
SU552945A1 |
Ю , D
