(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ | 1994 |
|
RU2113396C1 |
| Гидравлический кран-манипулятор | 1975 |
|
SU865771A1 |
| ГИДРОПРИВОД НАВЕСНОГО МАНИПУЛЯТОРА | 1999 |
|
RU2158707C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2167805C1 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2003 |
|
RU2264347C2 |
| Устройство автоматического управления гидравлическим экскаватором | 1988 |
|
SU1641953A1 |
| Портальный погрузчик | 1980 |
|
SU954371A1 |
| ГИДРАВЛИЧЕСКИЙ КРАН-МАНИПУЛЯТОР | 2001 |
|
RU2193518C1 |
| МАНИПУЛЯТОР ДЛЯ МОНТАЖНЫХ И ПОГРУЗОЧНО-РАЗГРУЗОЧНЫХ РАБОТB^lBJU'^l.-' | 1973 |
|
SU377229A1 |
| СТРЕЛОВОЙ ГРУЗОПОДЪЕМНЫЙ КРАН | 2014 |
|
RU2572354C1 |
1
Изобретение относится к средствам автоматизации управления гидравлических манипуляторов, например, лесозаготовительных машин.
Устройство может быть использовано также для автоматизации уцравления манипуляторов, используемых для загрузки приемных устройств различных поточных линий.
Известно устройство для управления рабочим органом гидравлического экскаватора с использованием следяш,ей системы с панто графным механизмом, которое обеспечивает многократное перемещение режуш.ей кромки ковша экскаватора по прямой линии при выполнении планировочных работ.
Это устройство содержит гидроцилиндры подъема и излома стрелы, направляющую, связанную со стрелкой, на которой установлены соединенные между собой посредством гибкой связи звездочки, одна из которых смонтирована на конце стрелы, а другая закреплена у ее основания 1.
Однако устройство это не позволяет автоматизировать многократную подачу, например, деревьев в фиксированную точку, поскольку после каждого цикла работы меняется начальная точка траектории перемещения.
Целью изобретения является обеспечение автоматического возврата рабочего органа с любой точки рабочего пространства в фикJ сированное положение.
Это достигается тем, что устройство снабжено шарнирно связанным с направляющей стержнем и зажимом, гидравлически связанным со штоковой полостью гидроцилиндра излома стрелы. При этом один конец 10 направляющей выполнен дугообразным.
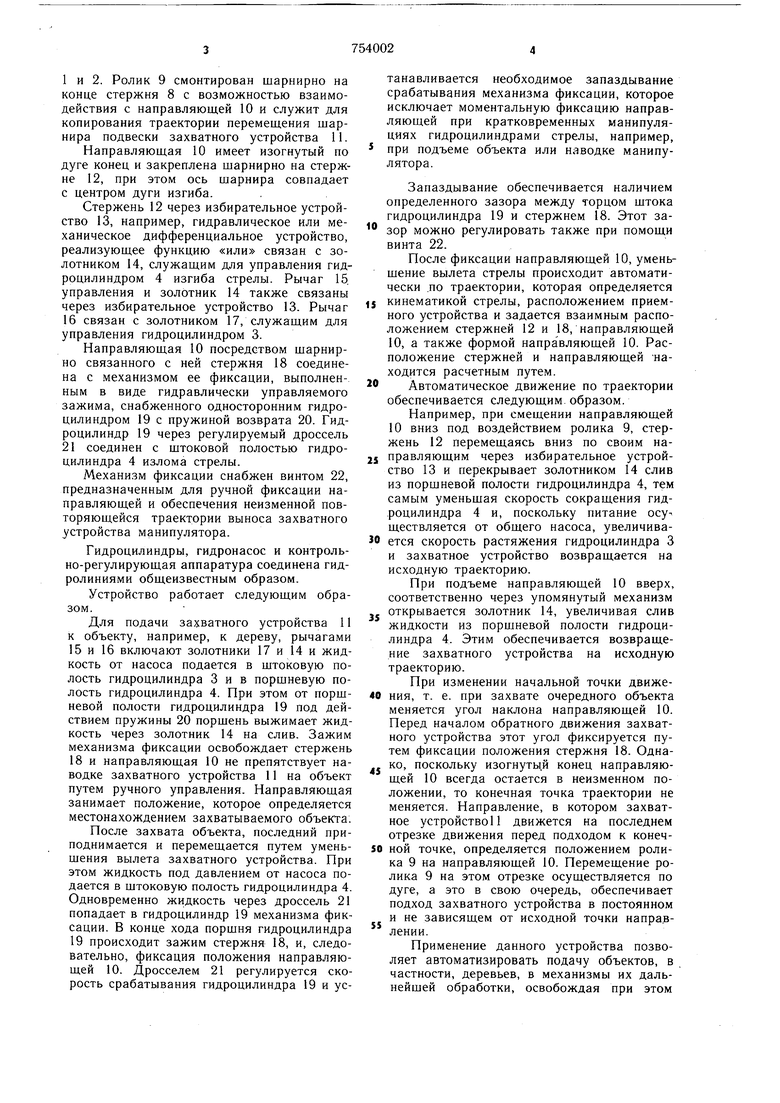
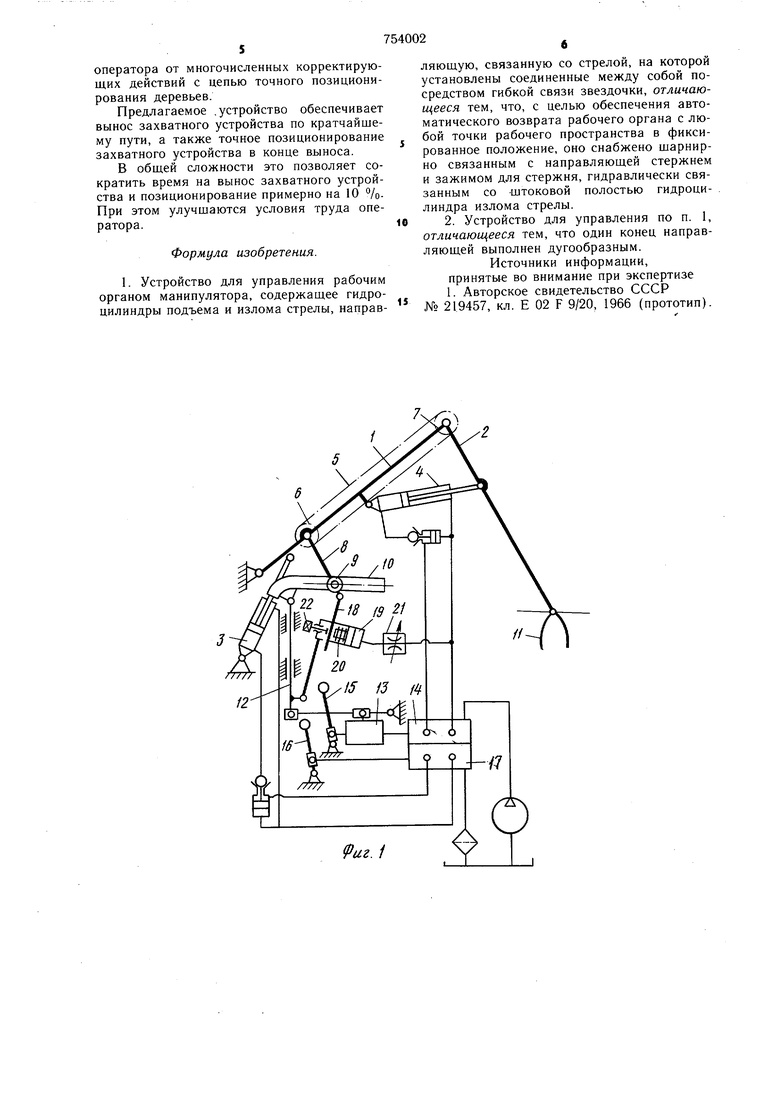
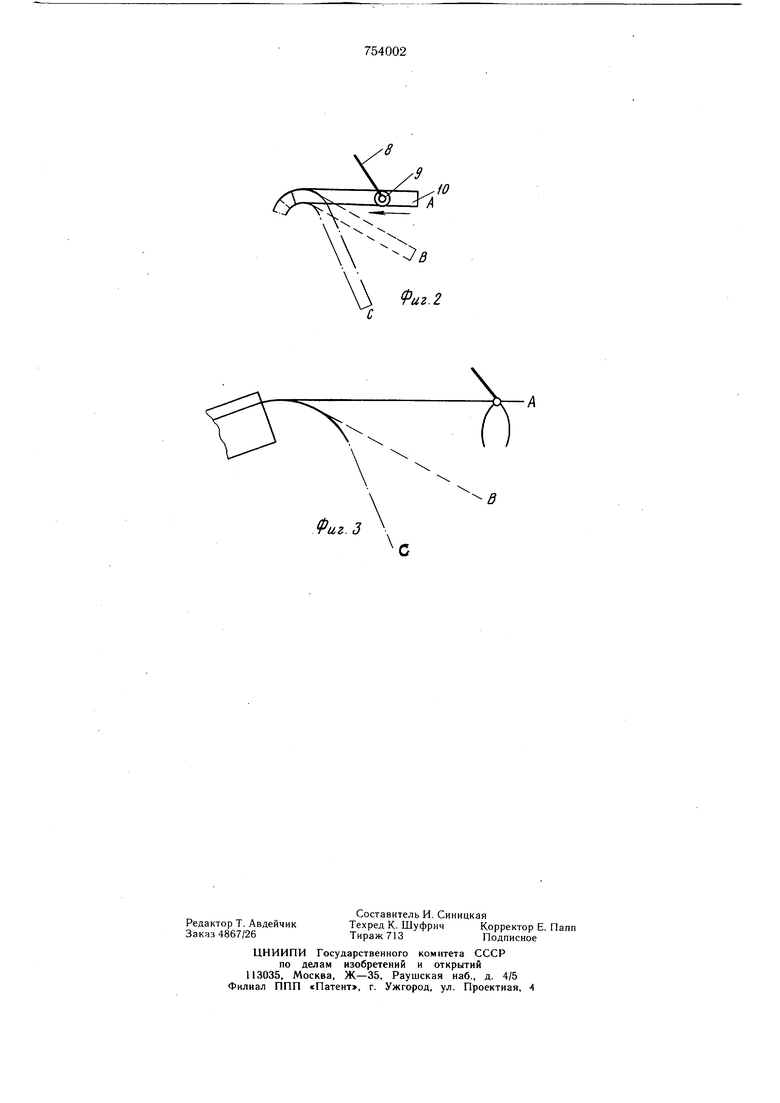
На фиг. 1 - схема устройства; на фиг. 2 схематически показаны положения направляющей; на фиг. 3 - траектории выноса захватного устройства манипулятора.
Устройство содержит шарнирно сочленен15ную стрелу, состоящую из двух звеньев 1 и 2 (фиг. 1). Звенья имеют гидроцилиндр 3 подъем стрелы и гидроцилиндр 4 ее излома.
На звене 1 стрелы установлен механизм пантографа, состоящий из гибкой связи 5, 20 например, цепи, звездочек 6 и 7, стержня 8. Звездочка 6 вместе с прикрепленным к ней стержнем 8 установлена шарнирно на звене 1, а звездочка 7 закреплена на звене 2 соосно с щарниром, сочленяющим звенья
1 и 2. Ролик 9 смонтирован шарнирно на конце стержня 8 с возможностью взаимодействия с направляющей 10 и служит для копирования траектории перемещения шарнира подвески захватного устройства 11.
Направляющая 10 имеет изогнутый по дуге конец и закреплена шарнирно на стержне 12, при этом ось шарнира совпадает с центром дуги изгиба.
Стержень 12 через избирательное устройство 13, например, гидравлическое или механическое дифференциальное устройство, реализующее функцию «или связан с золотником 14, служащим для управления гидроцилиндром 4 изгиба стрелы. Рычаг 15 управления и золотник 14 также связаны через избирательное устройство 13. Рычаг 16 связан с золотником 17, служащим для управления гидроцилиндром 3.
Направляющая 10 посредством щарнирно связанного с ней стержня 18 соединена с механизмом ее фиксации, выполненным в виде гидравлически управляемого зажима, снабженного односторонним гидроцилиндром 19 с пружиной возврата 20. Гидроцилиндр 19 через регулируемый дроссель 21 соединен с щтоковой полостью гидроцилиндра 4 излома стрелы.
Механизм фиксации снабжен винтом 22, предназначенным для ручной фиксации направляющей и обеспечения неизменной повторяющейся траектории выноса захватного устройства манипулятора.
Гидроцилиндры, гидронасос и контрольно-регулирующая аппаратура соединена гидролиниями общеизвестным образом.
Устройство работает следующим образом.
Для подачи захватного устройства 11 к объекту, например, к дереву, рычагами 15 и 16 включают золотники 17 и 14 и жидкость от насоса подается в штоковую полость гидроцилиндра 3 и в поршневую полость гидроцилиндра 4. При этом от поршневой полости гидроцилиндра 19 под действием пружины 20 поршень выжимает жидкость через золотник 14 на слив. Зажим механизма фиксации освобождает стержень
18и направляющая 10 не препятствует наводке захватного устройства 11 на объект путем ручного управления. Направляющая занимает положение, которое определяется местонахождением захватываемого объекта.
После захвата объекта, последний приподнимается и перемещается путем уменьшения вылета захватного устройства. При этом жидкость под давлением от насоса подается в штоковую полость гидроцилиндра 4. Одновременно жидкость через дроссель 21 попадает в гидроцилиндр 19 механизма фиксации. В конце хода поршня гидроцилиндра
19происходит зажим стержня 18, и, следовательно, фиксация положения направляющей 10. Дросселем 21 регулируется скорость срабатывания гидроцилиндра 19 и устанавливается необходимое запаздывание срабатывания механизма фиксации, которое исключает моментальную фиксацию направляющей при кратковременных манипуляциях гидроцилиндрами стрелы, например, при подъеме объекта или наводке манипулятора.
Запаздывание обеспечивается наличием определенного зазора между торцом штока гидроцилиндра 19 и стержнем 18. Этот зазор можно регулировать также при помощи винта 22.
После фиксации направляющей 10, уменьщение вылета стрелы происходит автоматически по траектории, которая определяется кинематикой стрелы, расположением приемного устройства и задается взаимным расположением стержней 12 и 18, направляющей 10, а также формой направляющей 10. Расположение стержней и направляющей находится расчетным путем. Автоматическое движение по траектории обеспечивается следующим, образом.
Например, при смещении направляющей 10 вниз под воздействием ролика 9, стержень 12 перемещаясь вниз по своим наJ правляющим через избирательное устройство 13 и перекрывает золотником 14 слив из поршневой полости гидроцилиндра 4, тем самым уменьшая скорость сокращения гидроцилиндра 4 и, поскольку питание осу ществляется от общего насоса, увеличивао ется скорость растяжения гидроцилиндра 3 и захватное устройство возвращается на исходную траекторию.
При подъеме направляющей 10 вверх, соответственно через упомянутый механизм открывается золотник 14, увеличивая слив жидкости из порщневой полости гидроцилиндра 4. Этим обеспечивается возвращение захватного устройства на исходную траекторию.
При изменении начальной точки движения, т. е. при захвате очередного объекта меняется угол наклона направляющей 10. Перед началом обратного движения захватного устройства этот угол фиксируется путем фиксации положения стержня 18. Однако, поскольку изогнуты.й конец направляющей 10 всегда остается в неизменном положении, то конечная точка траектории не меняется. Направление, в котором захватное устройство 11 движется на последнем отрезке движения перед подходом к конечной точке, определяется положением ролика 9 на направляющей 10. Перемещение ролика 9 на этом отрезке осуществляется по дуге, а это в свою очередь, обеспечивает подход захватного устройства в постоянном и не зависящем от исходной точки направлении.
Применение данного устройства позволяет автоматизировать подачу объектов, в частности, деревьев, в механизмы их дальнейщей обработки, освобождая при этом
оператора от многочисленных корректирующих действий с цепью точного позиционирования деревьев.
Предлагаемое .устройство обеспечивает вынос захватного устройства по кратчайшему пути, а также точное позиционирование захватного устройства в конце выноса.
В общей сложности это позволяет сократить время на вынос захватного устройства и позиционирование примерно на 10 /оПри этом улучшаются условия труда оператора.
Формула изобретения.
