1
Изобретение относится к устройствам, предназнаечниым для выполнения монтажных и погрузочно-разгрузочных операций.
Известны манипуляторы для монтажных и ногрузочно-разгрузочных работ, содержащие стрелу, шариирно смонтированную на основании, и геометрически подобную ей рукоятку управления, выполненную из шарнирно сочлененных звеньев и являющуюся зеркальным отображением структуры стрелы. Кроме того, манипулятор содержит два дополнительных шарнирно сочлененных звена, концы которых щарнирно соединены со звеньями рукояткн управления, и гидравлический следящий привод.
С целью упрощения конструкции и повыщения надежпости манипулятора на щарнире, соединяющем дополнительные звенья, установлен подвижный блок, огибаемый тяговым тросом, корневой конец которого закреплен на одном пз дополнительных звеньев, а ходовой конец пропущен последовательпо Через направляющие блоки, смонтированные на щарнирах рукоятки управления и стрелы, и связан с гидравлическим следящим приводом, причем тяговый трос намотан на направляющие блоки в одном паправленни, а блоки выполнены равного диаметра.
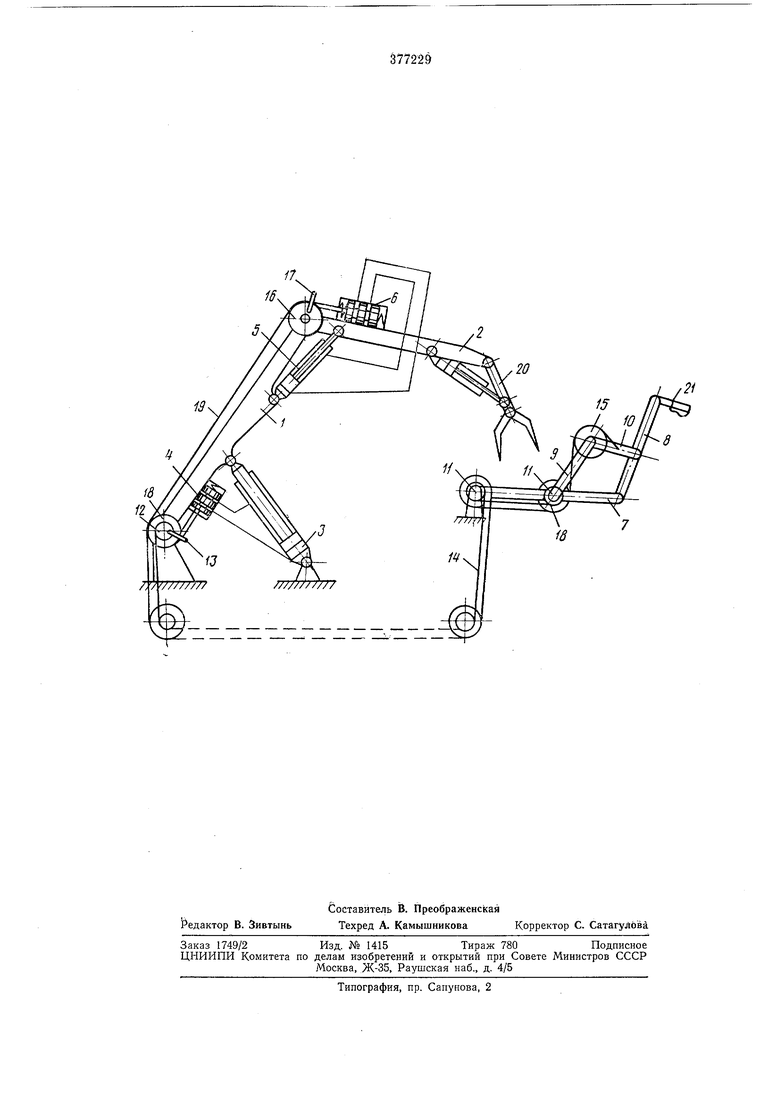
На чертеже изображена схема предлагаемого манипулятора.
Манипулятор содержит щарнирно-сочлененную стрелу, состоящую из звена / и звена 2. Привод звена / осуществляется с помощью гидроцилиндра 3 и следящего золотника 4, а звена 2 - с помощью гидроцилиндра 5 и следящего золотника 6. Рукоятка управления состоит из щарнирно-сочлененных звеньев 7 и S и двух дополнительных щарнирно-сочлененных звеньев 9 н 10, которые щарннрно соединены со звеньями 7 и 5. На осях щарнирных соединений звеньев 7 н 9 и звена 7 с основанием установлены блоки /У. На оси щарнирного соединения звена / стрелы с основанием установлен блок 12 с
толкателем 13, который взаимодействует с нодпружиненным плунжером следящего золотника 4.
Тяговый трос 14 нривода звена 1 стрелы кренится к звену Я последовательно огибает
направляющие блоки 11 н 12 и крепится на последнем.
На оси щарнирного соединения звеньев 9 и 10 установлен подвижный блок 15, а на оси шарнирного соединения звеньев 1 и 2
стрелы блок 16 с закрепленным на нем толкателем 17, взаимодействующим с плунжером следящего золотника 6. Диаметры блоков 15 и 16 равны между собой.
На осях щарнирного соединения звеньев 1
и 7 с основанием, а также на оси шарнирного соединения звеньев 7 и 5 установлены направляющие блоки 18 равного диаметра. Тяговый трос 19, корневой конец которого закреплен на дополнительном звене 10, намотан последовательно на подвижный блок 15, направляющие блоки 18 и блок 16, на котором и закреплен ходовой конец троса. При этом тяговый трос намотан на направляющие блоки 18 в одном направлении - в данном случае по часовой стрелке.
На звене 2 стрелы подвещен рабочий орган 20, а на рукоятке управления установлено звено 21. Отношение размеров звеньев 8 и 2 равно отношению размеров звеньев 7 и /.
Работа манипуляторов осуществляется следующим образом.
Например, звено 8 рукоятки управления совершает вращательное движение по часовой стрелке относительно неподвижного звена 7. Угол между звеньями 7 и Р уменьщается, натяжение троса 14 ослабевает и плунжер следящего золотника 4 смещается из нейтрального положения, причем линии нагнетания и слива соединяются с соответствующими полостями гидроцилиндра 3 таким образом, что звено / совершает движение по часовой стрелке. Угол между звеньями Р и /О увеличивается, натяжение троса 19 ослабевает и плунжер следящего золотника 6 смещается из нейтрального положения, соединяя соответствующие полости гидроцилиндра 5 с линиями нагнетания и слива, и звено 2 совершает движение относительно
звена / до тех пор, пока угол между звеньями / и 2 не будет равен углу между звеньями 7 и S. При этом точка шарнирного соединения рабочего органа 20 со звеном 2 стрелы будет совершать движение по траектории, подобной той, по которой двигается ось шарнирного соединения звеньев 8 и 21.
Предмет изобретения
Манипулятор для монтажных и погрузочно-разгрузочных работ, содержащий стрелу, шарнирно смонтированную на основании, и геометрически подобную ей рукоятку управления, выполненную из шарнирно сочлененных звеньев и являющуюся зеркальным отображением структуры стрелы, два дополнительных шарнирно сочлененных звена, концы которых шарнирно соединены со звеньями рукоятки управления, и гидравлический следящий привод, отличающийся тем, что, с целью упрощения конструкции и повышения надежности на шарнире, соединяющем дополнительные звенья, установлен подвижный блок, огибаемый тяговым тросом, корневой
конец которого закреплен на одном из дополнительных звеньев, а ходовой конец пропущен последовательно через направляющие блоки, смонтированные на шарнирах рукоятки управления и стрелы, и связан с гидравлическим следящим приводом, причем тяговый трос намотан на направляющие блоки в одном направлении, а блоки выполнены равного диаметра.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1975 |
|
SU547195A1 |
| МАНИПУЛЯТОРВСЕСОЮЗНАЯnATEb'TbO-TEXHiriЗНАЯ IHiri^:KAfffБНБЛ:^О>&:?ИА | 1971 |
|
SU318537A1 |
| ВСЕСОЮЗНА!^ | 1973 |
|
SU385717A1 |
| Телескопическая стрела манипулятора | 1976 |
|
SU555007A1 |
| Манипулятор | 1975 |
|
SU529072A1 |
| УСТРОЙСТВО ДЛЯ МОНТАЖА КОНТАКТНОЙ СЕТИ ЭЛЕКТРИФИЦИРОВАННЫХ ЖЕЛЕЗНЫХ ДОРОГ | 2001 |
|
RU2223184C2 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2002 |
|
RU2240971C2 |
| Устройство для управленияСТРЕлОй гРузОпОд'ЕМНОй МАшиНы | 1978 |
|
SU800292A1 |
| Система управления копирующего манипулятора | 1973 |
|
SU480538A1 |
| РЕЛЬСОВОЕ ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ МОНТАЖА И ДЕМОНТАЖА ПРОВОДОВ КОНТАКТНОЙ ПОДВЕСКИ ПОД ЗАДАННЫМ НАТЯЖЕНИЕМ И СПОСОБЫ МОНТАЖА ПРОВОДОВ КОНТАКТНОЙ ПОДВЕСКИ ПРИ ПОМОЩИ РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 1994 |
|
RU2097218C1 |