(54) ГИДРАВЛИЧЕСКИЙ .КРАН-МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1975 |
|
SU529072A1 |
| Система рулевого управления автопоезда | 1987 |
|
SU1474016A1 |
| МНОГОСЕКЦИОННЫЙ ГИДРОПРИВОД КРАНОМАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2007 |
|
RU2352518C1 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ БОЛЬШЕГРУЗНОГО СЕДЕЛЬНОГО АВТОПОЕЗДА | 2006 |
|
RU2312034C1 |
| УСТРОЙСТВО для КООРДИНАЦИИ ДВИЖЕНИЯ ДВУХЗВЕННОЙ СТРЕЛЫ ГИДРАВЛИЧЕСКОГО КРАНА | 1970 |
|
SU261674A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ | 1994 |
|
RU2113396C1 |
| Гидравлический привод механизма копания | 1973 |
|
SU653356A1 |
| СПОСОБ ИНТУИТИВНО КОПИРУЮЩЕГО УПРАВЛЕНИЯ ОДНОКОВШОВЫМ ЭКСКАВАТОРОМ | 2016 |
|
RU2614866C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОВОРОТОМ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2613132C2 |
| Устройство управления машиной манипуляторного типа | 1978 |
|
SU701792A1 |
1
йзовретение относится к подъемнотранспортньвл машинам и может быть использовано в подъемных кранах с многозвенными стрелами.
Известен подъемный кран, содержа- э щий поворотную стрелу, установленную на поворотной платформе, и механизм подъема стрелы и поворота платформы tl in Однако отсутствие механизма автома- тической координации выноса стрелы при п6вороте крана ухудшает показатели устойчивости крана и требует применения значительных противовесов и дополнительных опор. 15
известен также гидравлический кращ,.. содержаний колонну, сьюнтированную с возможностью- поворота, на которой установлена многозвенная стрела с исполнительными гидроцилиндрами, 20 связанньвли через механизм координации движения звеньей стрелы со следящим узлом, который включает копиры с роликами; установленными на игго-ках t2.
Недостаток известного крана - механизм координации звеньев стрелы не обеспечивает перемещения рабочего органа крана по .заданной траектории при повороте колонны со стрелой,что 30
отрицательно сказывается на показателях устойчивости крана.
Цель изобретения - повышение устойчивости крана при повороте колонны за счет перемещения его рабочего органа по заданной траектории.
Поставленная цель достигается тем, что в гидравлическом кранеманипуляторе, содержащем колонну, смонтированную с возможностью поворота, на которой установлена многозвенная стрела с исполнительными гидроцилйндрами, связанными через механизм координащии движения звеньев стрелы со следящим узлом, который включает копиры с.роликами, установленными на штоках, следящий узел содержит нормально разомкнутые контакты, KOTOjxte взаимодействуют с подвижным штоком, связанным с роликом закрепленного на колонне копира, и соединены электрическими цепями с электроуправляемзпл гидрораспределителем, гидравлически связаннЕЛЛ с гидроусилителем механизма координации движения звеньев стрелы, причем механизм координации кинематически связан со следящим узлом и штоком ,дозирующего гидроцилиндра, полости
которого соединяются с полостями исполнительных гидроцилиндров.
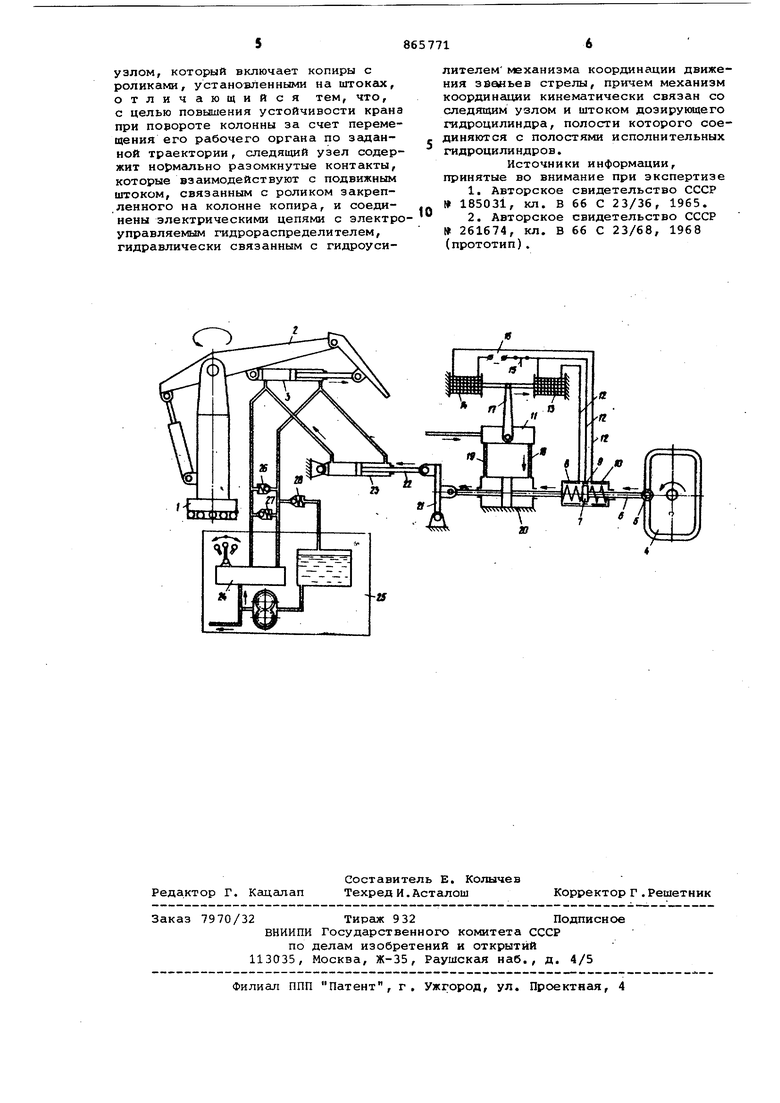
На чертеже схематически изображен предлагаемый кран-манипулятор.
На поворотной колонне 1 крана-манипулятора установлена многозвенная стрела 2 с исполнительным гидроцилиндром 3, который связан через механизм координации движения звена стрелы со следящим узлом, включающим копир 4 с роликом 5, установленным на конце штока 6 подвижного поршня 7. Копир 4 закреплен на колонне 1, Следящий узел содержит также нормально разомкнутые кольцевые контакты 8-10, взаимодействующие с подпружиненным подвижным поршнем 7 штока 6 и соединенные электрической цепью с электроуправляемым гидрораспределителем 11 механизма координации.
Электрическая цепь состоит из проводов 12, соленоидов 13 и 14, тумблера 15 включения электропитания и источника 16 электроэнергии.
Сердечники соленоидов с гидрораспределителем 11 связаны посредством рычага 17. Золотник гидрораспределителя 11 подпружинен и при обесточенных соленоидах фиксируется в нейтральном положении, запирая каналы 18 и 19, которые соединяют его с полостями гидроусилителя 20.
Один из штоков гидроусилителя 20 механизма координации жестко связан с подвижным корпусом контактов 8-10 а другой через рычаг 21 шарнирно связан со штоком 22 дозирующего гидроцилиндра 23, полости которого поср дством трубопроводов соединены с соответствующими полостями исполнительного гидроцилиндра 3 стрелы 2.
Гидроцилиндр 3 через гидрораспределитель 24 с ручным управлением соединяется с гидросистемой 25 базовой машины,, которая имеет обратные клапаны 26 - 28. К этой же гидросистеме подключен гидрораспределитель 11.
Конфигурация копира 4 зависит от требуемой траектории перемещения рабочего органа крана.. В данном случае форма копира 4 соответствует форме базовой машины в плане. Тем самым решается задача перемещения грузов на заданной высоте с максималь о возможным приближением его к базовой машине.,
Кран-манипулятор работает следующим образом.
После захвата груэа рабочим органом и подъема его на требуемую высоту оператор включением соответствующих рычагов сообщает колонне 1 вращательное движение. Вместе с колонной поворачивается копир (копиры 4, например, в указанном стрелкой направлении. При этом ролик 5 начинает отжимать шток 6 подвижного электроконтактного поршня 7 (влево
йа чертежу). Последний замыкает кольцевые контакты 8 и 9, в результате чего соленоид 13 получает питание, его сердечник втягивается,рычаг 17 поворачивается и золотник гидрораспределителя .11 открывает канал 18. В гидроусилитель 20 поступает рабочая жидкость, и поршень гидроусилители перемещается (влево по чертежу).Чере рычаг 21 движение передается штоку 22 дозирукадего гидроцилиндра 23. Рабочая жидкость, вытесняемая из полости гидроцилиндра 23, переливается в соответствующую полость исполнительного гидроцилиндра 3, при этом шток гидроиилиндра 3 начинает выдвигаться изменяя пространственное положение соединенного с ним звена стр.елы.
Когда ролик 5 после прохождения точки перегиба копира 4 начинает притягиваться по направлению к его центру, поршень 7 замыкает контакты 9 и 10, срабатывает соленоид 14, в результате чего шток гидроцилиндра 3 начинает втягиваться, и груз приближается к базовой мс1шине.
Одновременно с гидроцилиндром 3 в координированном режиме работают остальные гидроцилиндры звеньев стрелы, связанные со своими механизмами координации движения.
Если в процессе отслеживания копира прекргицается поворот стрелы, механизмы работают до тех пор, пока перемещающийся шток гидроусилителя 20 не сместит связанный с ним корпус контактов 8-10 настолько, что становится возможным возврат поршня 7 (под действием пружин) в нейтргшьное положение.
Цепь питания соленоидов 13 и 14 разрывается; золотник гидрораспределителя 11 возвращается в нейтральное положение, запирая каналы 18 и 19. Движение поршня гидроусилителя 20 прекращается; останавливаются и друт гие гидромеханизмы. Положение точки, в которой остановился ролик 5, таким образом отслежена.
Переход на ручное управление стрелой осуществляется выключением тумблера 15.
Применение изобретения позволяет повысить Производительность труда на погрузочно-разгрузочных работах за счет автоматизации процесса управления стрелой и увеличения грузоподъемности без угрозы создания критического опрокидывающего момента.
Формула изобретения
Гидравлический кран-манипулятор, to содержащий колонну, смонтированную с возможностью поворота, на которой установлены многозвенная стрела с исполнительными гидроцилиндрами,связанными через механизм координации 45 движения звеньев стрелы со следящи1У
узлом, который включает копиры с роликами, установленными на штоках, отличающийся тем, что, с целью повьошения устойчивости крана при повороте колонны за счет перемещения его рабочего органа по заданной траектории, следящий узел содержит нормально разомкнутые контакты, которые взаимодействуют с подвижным штоком, связанным с роликом закрепленного на колонне копира, и соединены электрическими цепями с электроуправляемым гидрораспределителем, гидравлически связанным с гидроуси г
лителем механизма координации движения звеньев стрелы, причем механизм координации кинематически связан со следящим узлом и штоком дозирующего гидроцилиндра, полости которого соединяются с полостями исполнительных гидроцилиндров.
Источники информации, принятые во внимание при экспертизе
