Изобретение относится к судовождению и предназначено для оперативной идентификации параметров линейной математической модели судна по курсу в реальном масштабе времени, используемых при настройке системы управления судном по курсу.¶ Управление движением автономным/полуавтономным судном осуществляется с помощью системы автоматического управления движением судна. В системе автоматического управления, для управления движением судна по курсу на скоростях хода более 4-х узлов для настройки регуляторов в основном используются модели Номото [1], [2, с. 20], для судов неустойчивых на курсе используются нелинейные модели Норрбина и Беча [2, с. 20] Для идентификации параметров моделей Номото, Норрбина и Беча (далее - модель) судно выполняет маневр зигзаг [1, с. 279-282], [2, с. 47-55]. При выполнении маневра зигзаг отклонения от основного курса движения судна составляют десять и более градусов, поэтому идентификация параметров модели по маневру зигзаг не осуществятся во время движения судна по маршруту, а выполняется во время ходовых испытаний. Для грузовых судов, у которых маневренность сильно зависит от загрузки судна, испытания проводятся отдельно для разных загрузок судна. Для составов, состоящих из буксира с одной или несколькими баржами, выполнения манера зигзаг для идентификации параметров модели не проводят по причине нецелесообразности, так как разное количество барж и их различная загрузка приводят к большому количеству наборов параметров моделей, где каждый набор параметров модели соответствует определенному количеству и загрузке барж. При отсутствии данных о параметрах модели невозможно обеспечить автоматическое управление движением судна по курсу. По этой причине, разработка способа, позволяющего проводить настройку регуляторов системы управления судном по курсу во время движения судна, не отклоняясь от основного маршрута, является актуальной задачей, решение которой позволит использовать на реке технологии автономного судовождения для грузовых судов и составов, состоящих из буксира и барж.
Известен по патенту RU 2146063 (МП G05B 17/02, опубл. 27.02.2000) способ идентификации линейного объекта, включающий подачу на объект идентификации случайного сигнала, определение значений входного и выходного сигналов объекта, подачу их на идентификатор непрерывной дроби, в котором эти значения преобразуют в детерминированные характеристики корреляции значений входного и вход-выходного сигналов объекта с последующей их обработкой, получение прогнозирующей модели объекта и определение модельных значений выходного сигнала объекта идентификации. Способ предназначен для определения математической модели объекта. Недостатками данного способа является недостаточная точность и невозможность работать с зашумленным входным сигналом, что и не исключает искажение прогнозирующей модели объекта. Кроме того, в данном способе используется подача случайного входного сигнала, что не допустимо при движении судна в узкостях (по руслу реки), так как подача случайного управляющего сигнала на перекладку пера руля может привести к выходу судна из судоходного канала.
Известен по патенту RU 2233480 (МПК G06N 1/00, опубл. 27.07.2004) способ идентификации линейного объекта, предназначенный для автоматического определения структуры и параметров математической модели динамического объекта в реальном масштабе времени. Способ включает определение значений входного и выходного сигналов объекта, подачу их на идентификатор непрерывной дроби с последующим восстановлением дискретной математической модели объекта и переходом к непрерывной математической модели объекта, в которой определяют дискретные модельные значения выходного сигнала, из множества которых определяют параметры нелинейной статической характеристики объекта, эти данные запасают в блоке хранения, многократно изменяют амплитуду подаваемого входного сигнала и повторяют весь процесс. Недостатком данного способа является многократная подача входного сигнала изменяющейся амплитуды, что не допустимо при движении судна в узкостях (по руслу реки), так как подача такого управляющего сигнала на перекладку пера руля может привести к выходу судна из судоходного канала.
Известен по патенту RU 2256950 (МПК G06F 17/18, G05B 17/02, опубл. 20.07.2005) способ идентификации линеаризованного динамического объекта. Способ включает измерение входного и выходного сигналов объекта с шагом дискретизации Δt, последовательную подачу интервальных значений этих сигналов на идентификатор непрерывной дроби, восстановление дискретной передаточной функции и прогнозирующей модели объекта, определение интервальных модельных значений выходного сигнала. Способ позволяет автоматически определять структуру и неизвестные параметры математической модели динамического объекта, но имеет следующие недостатки: не учитывает погрешности единичных измерений значений входных и выходных сигналов, отсутствует минимизация критерия ошибки между прогнозируемым значением модели и измеренным выходным сигналом. Ошибки измерения могут вносить большие искажения в значения входных и выходных сигналов, а отсутствие минимизации критерия ошибки между прогнозируемым значением модели и измеренным выходным сигналом, в описанном методе может привести к неверным оценкам параметров модели объекта.
Известен по патенту RU 2444043 (МПК G05B 17/02, G06F 17/18, опубл. 27.02.2012) способ параметрической идентификации математической модели судна. Способ включает определение входных и выходных сигналов судна, осуществляемое с шагом дискретизации Δt, определение параметров математической модели судна и на их основе построение прогнозирующей модели, которая представляет собой систему дифференциальных уравнений. Входные сигналы рассчитывают, а выходные сигналы измеряют, при этом измеряют линейные продольное, поперечное и угловое ускорения судна N раз за цикл обработки продолжительностью Т. По измеренным значениям ускорений находят соответствующие значения линейных и угловой скоростей, рассчитывают невязки (разности) между левой и правой частями дифференциальных уравнений. Определяют взвешенную сумму квадратов невязок и осуществляют минимизацию последней. Находят значения параметров математической модели судна и осуществляют повторение цикла измерений и идентификации. Недостатком данного способа является то, что для идентификации параметров модели используются измеренные линейные и угловые ускорения судна, для этого на судне должна быть инерциальная навигационная система или инерциальный измерительный модуль, которые на речных судах отсутствуют. Данный способ наиболее близок к предлагаемому способу и принят за прототип.
Задачей изобретения является устранение указанных недостатков существующих способов параметрической идентификации математических моделей, позволяющее осуществлять идентификацию параметров линейной модели при движении судна по маршруту.
Технический результат изобретения состоит в том, что предложенный способ обеспечивает определении параметров линейной математической модели судна для настройки регулятора системы управления по курсу за счет выполнения маневра идентификации параметров модели, который позволяет не отклонятся судну от основной линии пути.
Указанный технический результат достигается тем, что в способе настройки системы управления судна по курсу, включающего выбор математической модели судна по курсу, представляющее собой дифференциальное уравнение, и измерение выходного сигнала, дифференциальное уравнение, определяющее зависимость угловой скорости циркуляции судна, являющийся выходным сигналом, от угла перекладки пера руля, являющимся входным сигналом, записывается в пространстве состояний в дискретном времени и в виде ARMAX модели, определяются зависимости параметров математической модели от коэффициентов полиномов ARMAX модели, измеряются значения положения пера руля и угловой скорости циркуляции судна с шагом дискретизации Δt при выполнении маневра идентификации параметров модели по курсу, включающего перекладку пера руля судна с нулевого положения на значение из диапазона от семи до пятнадцати градусов одного борта, достижение заданного положения пера руля, последующую перекладку пера руля на значение из диапазона от семи до пятнадцати градусов другого борта, достижение заданного положения пера руля и установление пера руля в нулевое положение, вычисляются параметры математической модели судна по курсу для каждого значения угловой скорости циркуляции и угла перекладки, при чем на каждом шаге дискретизации минимизируется квадрат ошибки между оценкой угловой скорости от ARMAX модели и измеренным выходным значением угловой скорости циркуляции судна, определяются временные участки, на которых оценки параметров модели судна по курсу асимптотически приближаются или колеблются вдоль некоторых средних значений, и вычисляются параметры математической модели как средневзвешенные значения рассчитанных параметров модели для каждого шага дискретизации Δt, которые относятся к ранее определенному временному участку и вычисляются значения параметров регулятора системы управления по курсу на основе ранее выбранной математической модели судна по курсу и вычисленных значений параметров модели.
Технический результат достигается также тем, что:
в качестве математической модели судна по курсу используют математическую модель Номото 1-го либо модель Номото 2-го порядка;
при выполнении маневра идентификации параметров модели судна используют циркуляцию судна при переходе с галса на галс.
Сущность заявляемого способа настройки системы управления судном по курсу поясняется чертежами, где изображено:
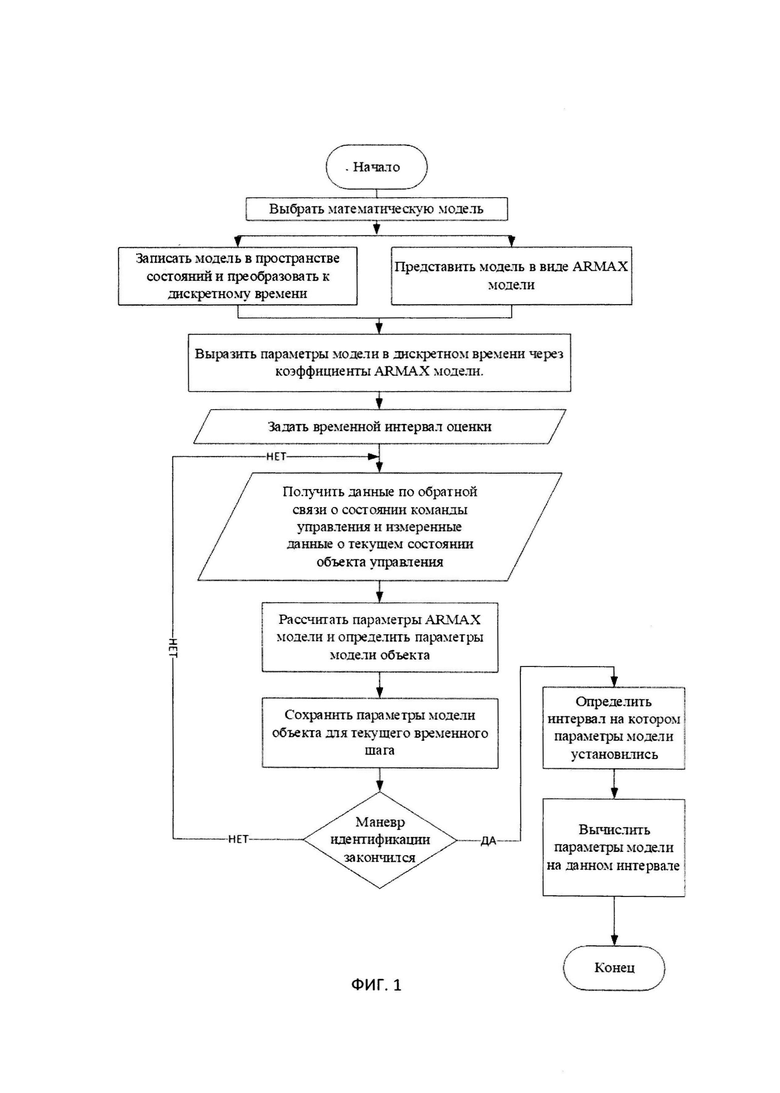
на фиг. 1 - блок-схема алгоритма способа;
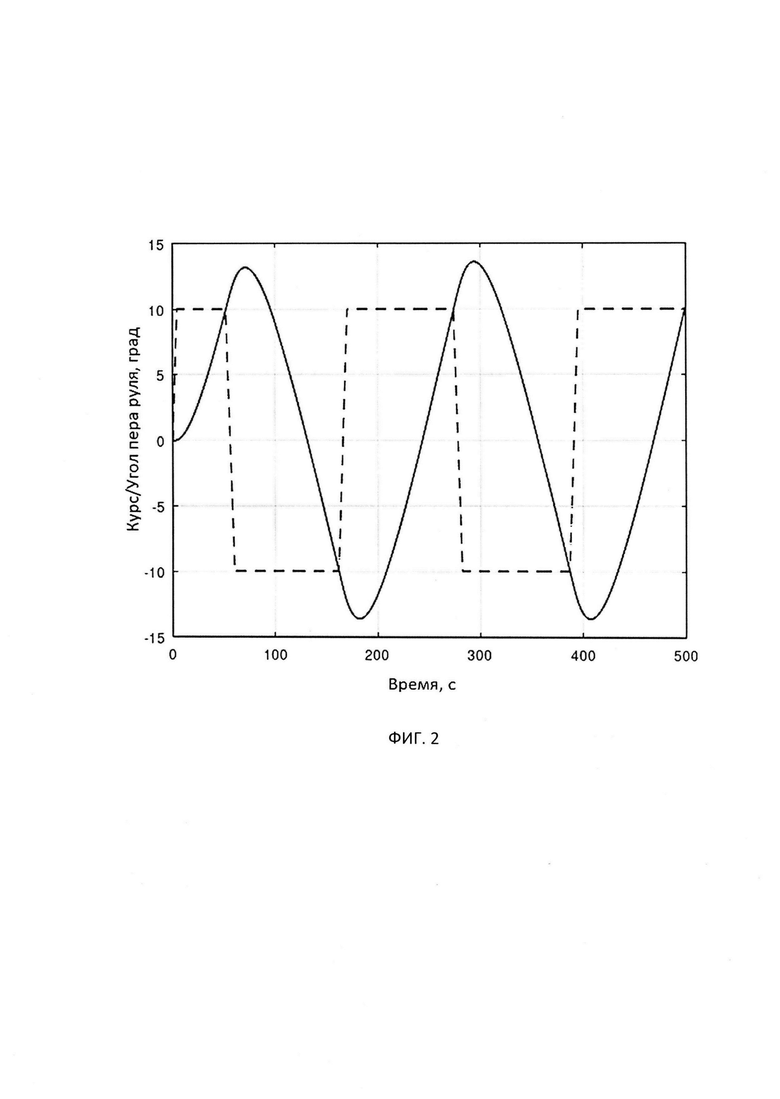
на фиг. 2 - графики изменения курса (сплошная линия) и перекладки пера руля (пунктирная линия) от времени при выполнении маневра зигзаг для модели Container ship;
на фиг. 3 - графики изменения курса (сплошная линия) и перекладки пера руля (пунктирная линия) от времени при выполнении предложенного маневра идентификации параметров модели для модели Container ship;
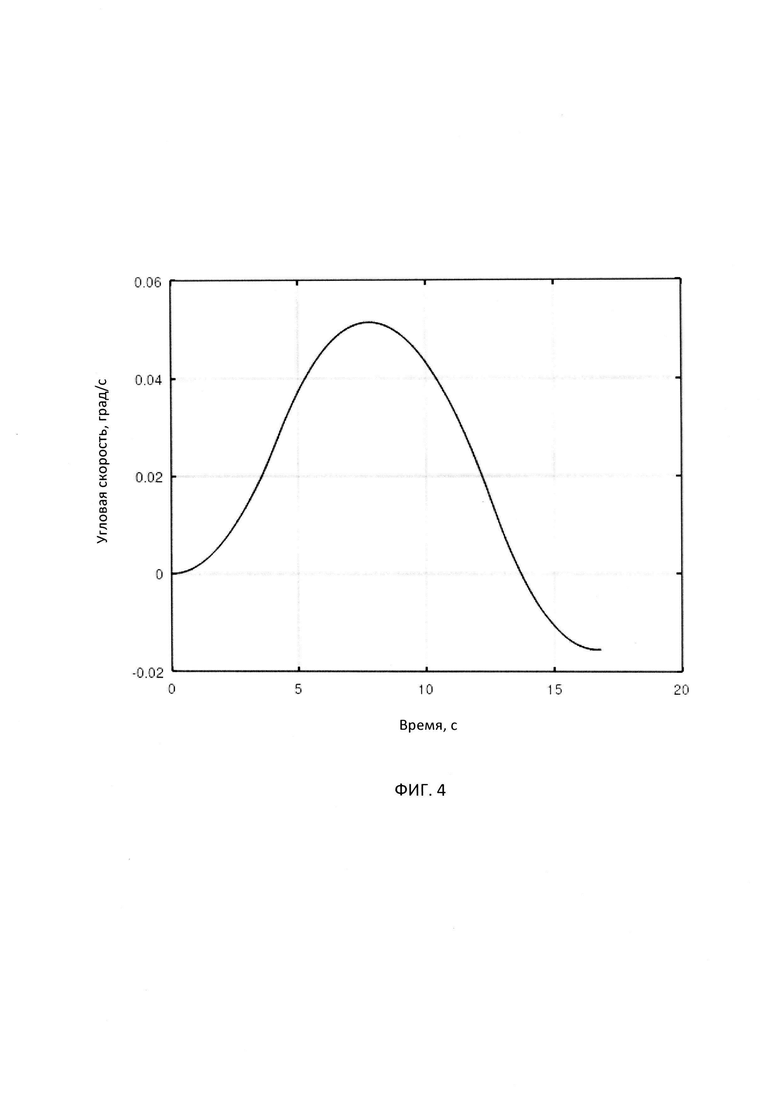
на фиг. 4 - график изменения угловой скорости модели Container ship при выполнении предложенного маневра идентификации;
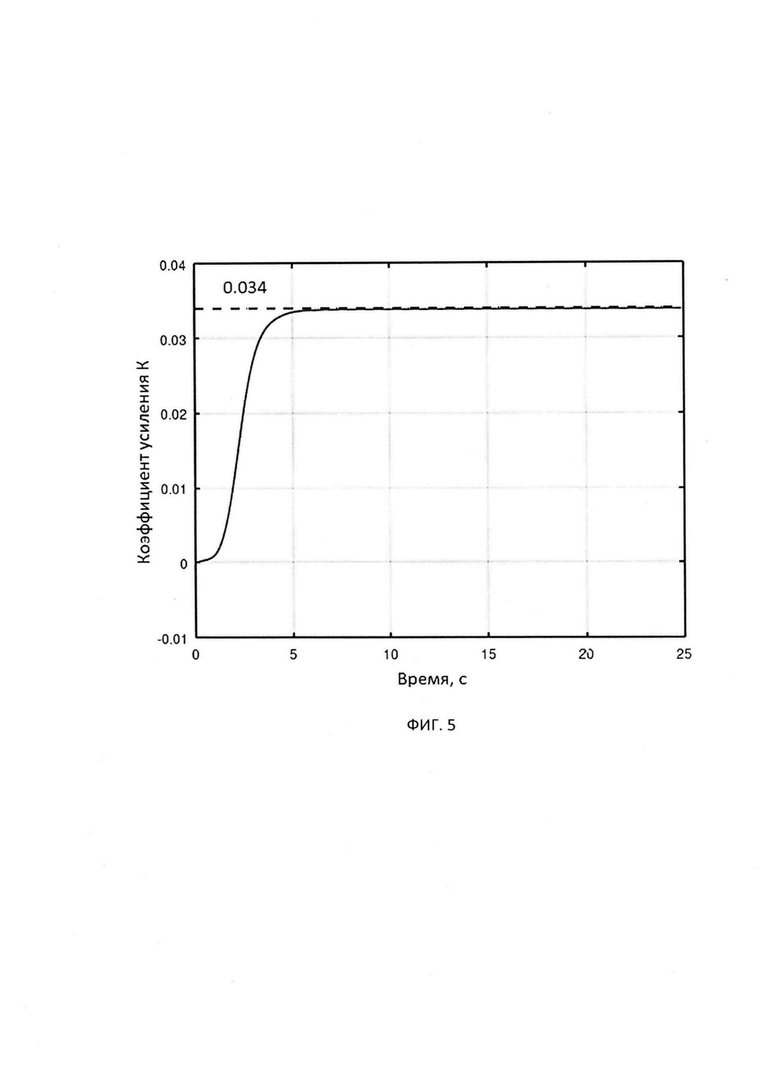
на фиг. 5 - график оценки коэффициента усиления K для модели Container ship предложенным способом идентификации;
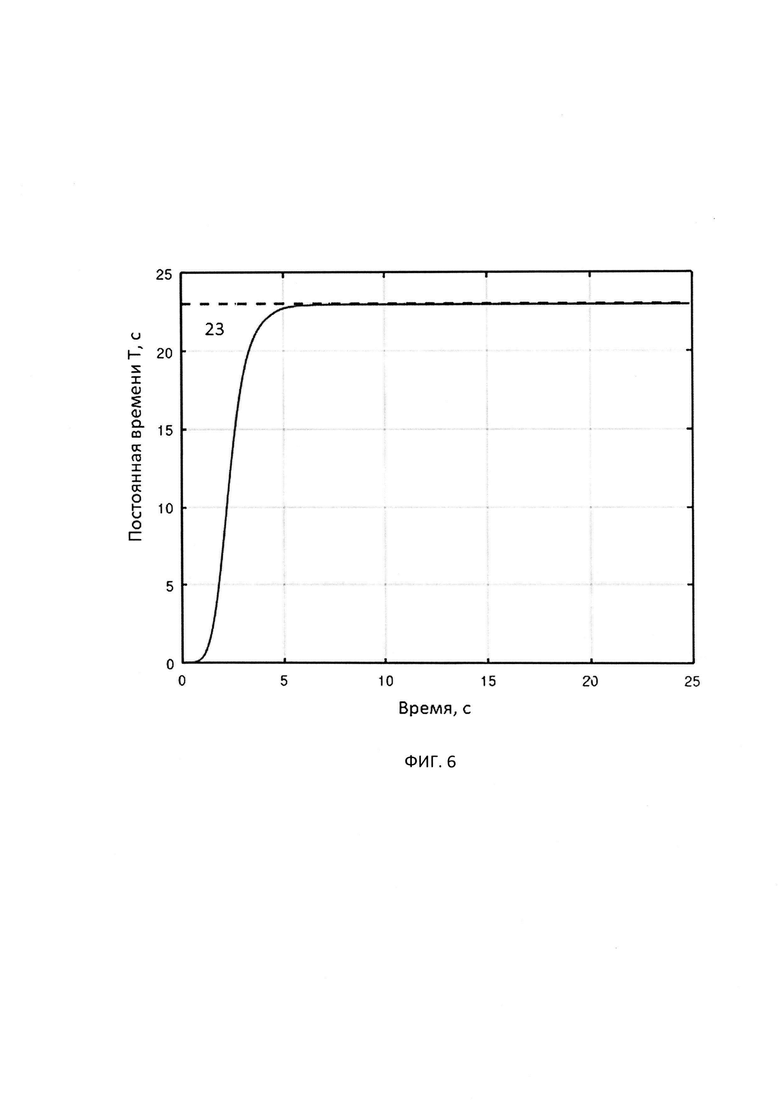
на фиг. 6 - график оценки постоянной времени Т для модели Container ship предложенным способом идентификации;
на фиг. 7 - график угла перекладки винта в насадке буксира-толкача во время выполнения маневра идентификации;
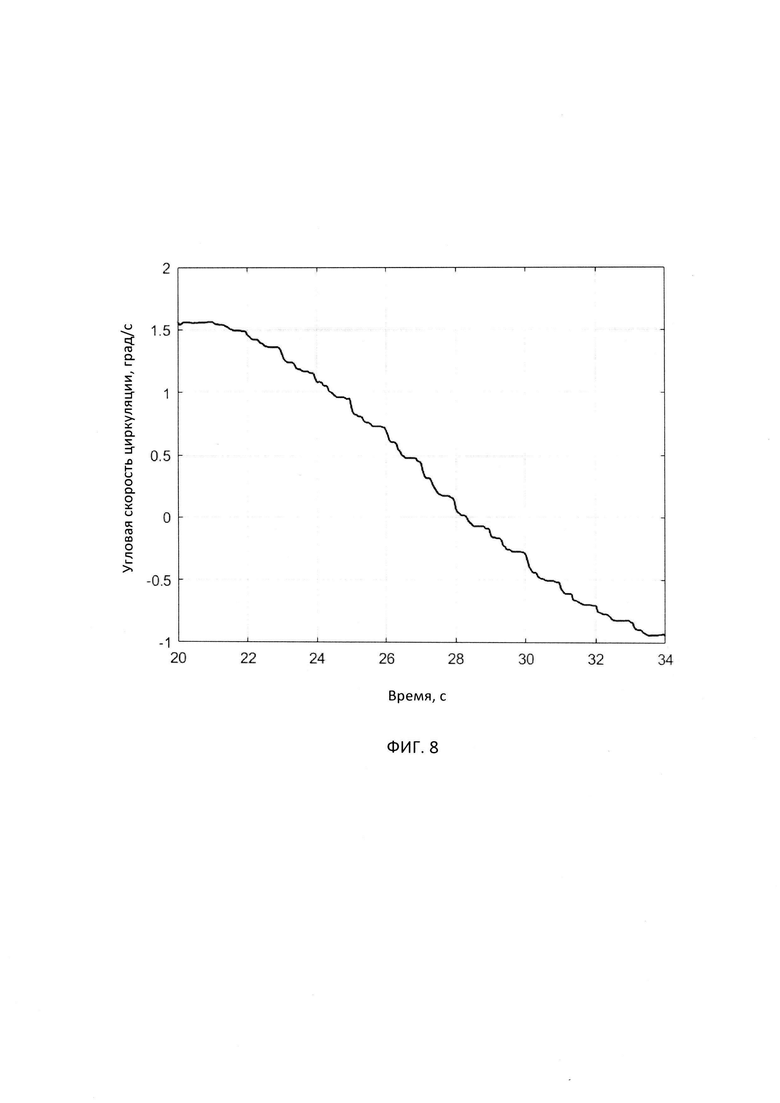
на фиг. 8 - график изменения угловой скорости циркуляции буксира-толкача во время выполнения маневра идентификации;
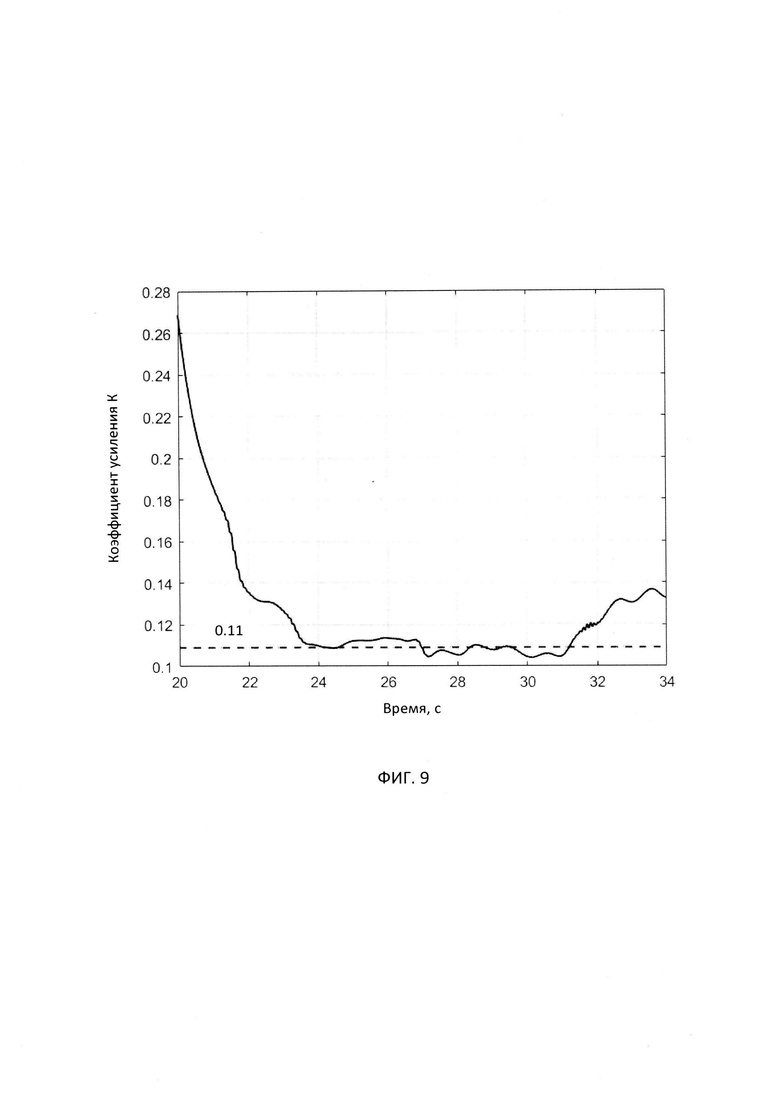
на фиг. 9 - график оценки коэффициента усиления K для буксира-толкача предложенным способом идентификации;
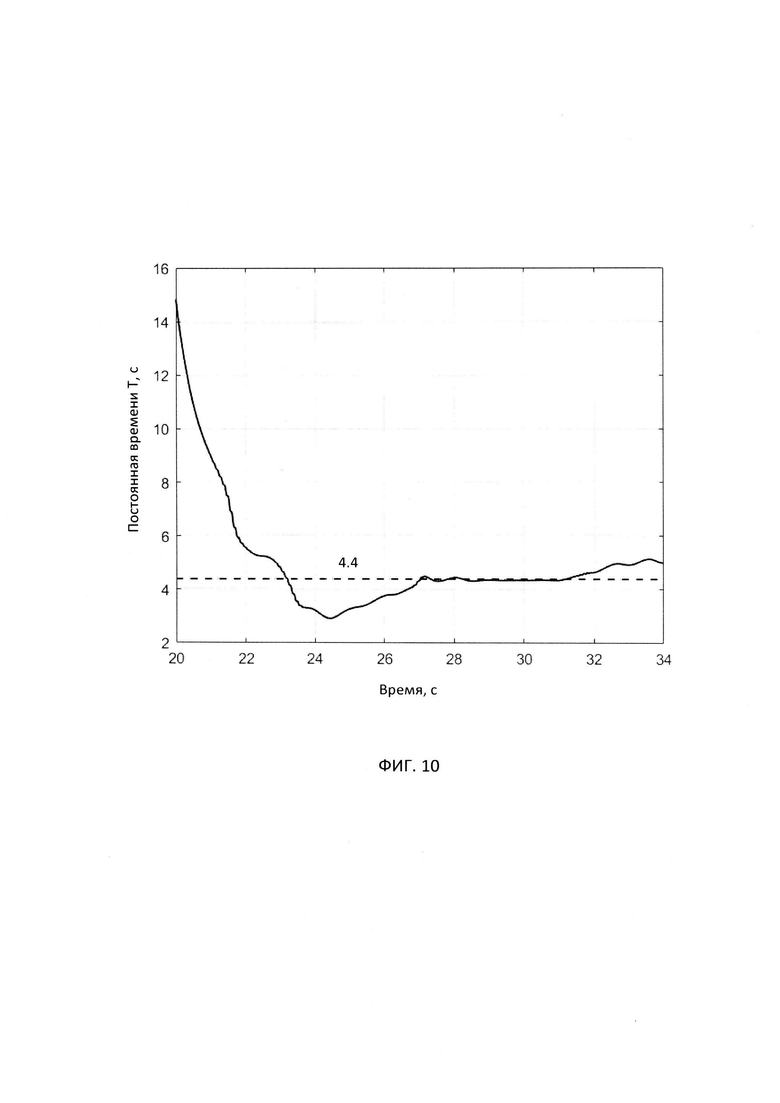
на фиг. 10 - график оценки постоянной времени Т для модели буксира-толкача предложенным способом идентификации.
Для определения курса и угловой скорости на речных судах устанавливают гирокомпасы, спутниковые или магнитные компасы. Частота выдачи данных курса и угловой скорости, как правило, составляет не ниже 10 Гц. Тогда за время маневра идентификации с учетом скорости перекладки пера руля при работе рулевой машины на одном насосе мы получим выборку измерений угловой скорости около 200-250 отсчетов.
Способ заключается в следующем:
1. Выбирается линейная математическая модель судна по курсу: модель Номото 1-го или модель Номото 2-го порядка.
2. Линейная модель судна по курсу представляется в пространстве состояний в непрерывном времени [3, с. 71]:

где x(t) - вектор состояния;
u(t) - вектор управления;
А, В, С - матрицы состояния, управления и измерения соответственно.
Далее система уравнений (1) модели записывается в дискретном времени [4, с. 472]:

где h - шаг дискретизации;
k - номер отсчета измерения.
3. Представляется модель (1) в виде ARMAX модели следующим уравнением [5, с. 57, 291]:

где у(k) - измеренное состояние объекта;
u(k) - вход управления;
е(k) - ошибка, вызванная шумом измерений;
A(z-1),B(z-1) - полиномы знаменателя и числителей дискретной передаточной функции по управлению и возмущению в пространстве z, соответственно.
4. Выражаются параметры модели из уравнения (2) через коэффициенты уравнения (3).
5. Задается временной интервал оценки (окно), в течение которого выполняется маневр идентификации параметров модели судна по курсу.
6. При движении судна на прямолинейном участке выполняется маневр идентификации параметров модели судна по курсу, включающий следующую последовательность действий: переложить перо руля от нулевого значения на значение от семи до пятнадцати градусов одного борта, далее при достижении заданного значения осуществить перекладку на противоположный борт на такое же значение, при достижении заданного положения пера руля осуществить возврат пера руля в нулевое положение. Основным отличием данного маневра от маневра зигзаг является то, что для осуществления перекладки пера руля на другой борт не нужно дожидаться заданного значения изменения курса судна. То есть перекладка пера руля на другой борт осуществляется сразу же по достижении перекладки на противоположный борт, что позволяет задемпфировать появившуюся угловую скорость циркуляции судна и сохранить основное направление движения судна при допустимом отклонении от основного курса. В качестве базового значения перекладки пера руля принимается значение равное десяти градусов. Данное значение угла перекладки пера руля при выполнении маневра может быть скорректировано как в сторону увеличения, так и в сторону уменьшения, это зависит от значения угловой скорости судна, чем ниже значение угловой скорости, тем больше угол перекладки пера руля и наоборот.
Для выполнения поворота судна при переходе с одного прямого участка (галса) на другой судоводитель или система автоматического управления движением производит перекладку пера руля на значение, которое обеспечивает необходимый радиус поворота, далее на время поворота положение пера удерживается в этом положении, и перед выходом на прямолинейный участок (галс) перо руля перекладывается на другой борт для того, чтобы задемпфировать установившуюся угловую скорость и плавно выйти на прямолинейный участок, перед выходом на прямолинейный участок перо руля устанавливается в нулевое положение. Данный маневр очень похож на предложенный маневр идентификации параметров математической модели судна на прямолинейном участке, с тем лишь отличием, что перо руля удерживается в заданном положении на время выполнения поворота. В случае если угол перекладки пера руля, необходимый для обеспечения заданного радиуса поворота, превышает семь градусов, то маневр поворота можно использовать для идентификации параметров математической модели судна по курсу.
7. Во время выполнения маневра идентификации на каждом шаге дискретизации Δt с использованием метода RELS [5, с. 295] находятся коэффициенты полиномов A(z-1) и B(z-1) в пространстве z. Метод RELS является модификацией классического метода наименьших квадратов и обеспечивает расчет коэффициентов полиномов A(z-1) и B(z-1) при использовании зашумленных входных и выходных данных [5, с. 315], [6].
8. По полученным значениям коэффициентам полиномов на каждом шаге Δt вычисляются параметры математической модели и рассчитанные значения параметров сохраняются в массив данных.
9. По завершении маневра идентификации параметров модели определяется временной интервал, на котором рассчитанные параметры модели на каждом шаге дискретизации приближаются к некоторым средним значениям.
10. Вычисляются параметры модели судна путем нахождением среднего взвешенного значения (в простом варианте, среднего арифметического значения) на основе рассчитанных параметров модели для каждого шага дискретизации Δt, при чем для вычисления используются только те параметры модели, которые относятся к выбранному временному интервалу.
Пример 1
Предлагаемый способ используется для идентификации параметров модели Номото 1-го порядка, которые необходимы для настройки системы управления курсом судна. В качестве объекта управления возьмем модель Container ship из стандарта IEC 62065 [7]. Модель Container Ship является одной из трех моделей, на которых проходит сертификация современных авторулевых в соответствии с ISO 11674 2019-11 [8].
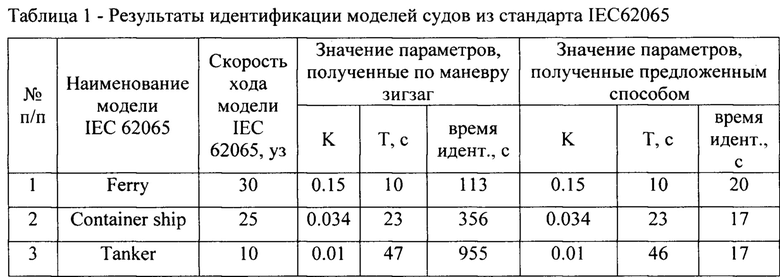
Идентификация параметров модели Номото 1-го порядка для Container ship с использованием маневра зигзаг и алгоритма идентификации, предложенного в [1], занимает более 350 с (время выполнения маневра) и дает следующие результаты (Фиг. 2): T=23 с, K=0.034 на скорости хода 25 узлов.
Модели Номото 1-го порядка соответствует следующее дифференциальное уравнение:

где ω(t) - угловая скорость циркуляции судна;
δ(t) - угол перекладки пера руля;
Т - постоянная времени объекта;
K - коэффициент усиления.
Уравнение (4) в пространстве состояний в непрерывном времени с учетом (1) имеет следующий вид:

Тогда модель (5) в дискретном времени в соответствии с (2) записывается:

Уравнение ARMAX модели (3) для модели Номото (4) имеет следующий вид:

Из уравнений (6) и (7) выражаются параметры модели Номото 1-го порядка:

При моделировании движения судна с помощью модели Container ship на скорости хода 25 узлов моделируется выполнение предложенного маневра идентификации параметров модели. Результаты моделирования представлены на фиг. 3 и 4. Из графиков видно, что время маневра идентификации составило около 17 с и при выполнении маневра идентификации курс судна изменился менее чем на 1 градус, что позволяет считать, что судно не изменило свое направление движения, так как допустимая погрешность при удержании курса составляет ±1°.
В качестве выходного сигнала при выполнении маневра идентификации параметров модели от модели Container ship поступают данные угловой скорости циркуляции, которые представлены на фиг. 4.
На основе данных о положении пера руля и данных угловой скорости циркуляции с помощью RELS на каждом шаге дискретизации Δt находятся коэффициенты ARMAX модели и по формулам (8) и (9) проводится оценка параметров модели K и Т. Полученные оценки параметров K и Т для каждого шага дискретизации Δt иллюстрируются на фиг. 5 и 6. Из графиков видно, что оценки параметров модели приближаются к установившимся значениям параметров уже через 6 с. Установившиеся значения параметров K и Т представлены на фиг. 5 и 6 пунктирными линиями и их значения составляют 0,034 и 23 с соответственно, что совпадает со значениями, полученными при использовании методики [1] по маневру зигзаг.
В таблице 1 представлены результаты идентификации параметров модели Номото 1-го порядка для моделей IEC62065[7, Annex I] предложенным способом и способом [1] по маневру зигзаг. Так для модели Container ship и Ferry оба способа дают одинаковый результат (с точностью до округления), а для модели Tanker предложенный способ дает более точную оценку постоянной времени [7, table 1.5].
Пример 2
В данном примере используются данные, полученные на испытаниях буксира-толкача типа РТ-600. При движении по руслу реки на скорости около 10 км/ч проводилась идентификация параметров модели Номото 1-го порядка. На фиг. 7 и фиг.8 представлены угол перекладки винта в насадке и изменения угловой скорости циркуляции буксира-толкача во время выполнения маневра идентификации. В качестве маневра для идентификации параметров модели использовался поворот, выполняемый судном.
Входной и выходной сигналы сильно зашумлены, поэтому для более сглаженной оценки параметров модели Номото 1-го порядка для буксира-толкача, оба сигнала были пропущены через фильтр нижних частот, в этом случае задержка фильтрации не сказывается на оценке параметров K и Т. На фиг. 9 и фиг. 10 представлены результаты идентификации параметров K и T на каждом шаге дискретизации Δt. Из графиков видно, что оценки параметров модели приближаются к установившимся значениям параметров на временном интервале с 26 по 32 с. На данном интервале параметры K и T были усреднены и переданы в систему управления курсом. Средние значения параметров K и Т представлены на фиг. 9 и 10 пунктирными линиями и их значения составляют 0,11 и 4.4 с соответственно.
Важным отличием предложенного способа является то, что время идентификации параметров модели судна по курсу в предложенном способе не определяется динамикой судна, а определяется временем перекладки пера руля с борта на борт, а динамика судна учитывается в амплитуде угла перекладки пера руля. Это отличие позволяет проводить идентификацию параметров модели судна по курсу, не отклоняясь от основного направления движения судна.
Заявленное изобретение реализовано на действующем судне «Эковольт» и буксире «Прокопий Драчев» и используется при движении судна в автономном режиме. Испытания, проводимые на данных судах, показали, что заявленное изобретение позволяет обеспечить идентификацию параметров линейной математической модели судна по курсу с достаточной точностью, чтобы обеспечить настройку системы управления по курсу, при этом во время маневра идентификации судно не отклоняются от основной линии пути [9, 10].
Источники информации
1. K. Nomoto. Analysis of Kempfs standard maneuver test and proposed steering quality indices. Proceedings of 1st Symposium on Ship Maneuverability, 1960.
2. J. Van Amerongen. Adaptive steering of ships: A model reference approach to improved manoeuvring and economical course keeping. Doctoral thesis. Delft University of Technology. Delft University Press, 1982.
3. Гудвин Г.К. Проектирование систем управления/ Г.К. Гудвин, С.Ф. Гребе, М.Э. Сальдаго. - М.: БИНОМ. Лаборатория знаний, 2004. - 911 с.
4. Бессекерский В.А., Попов Е.П. Теория систем автоматического управления/В.А. Бесекерский, Е.П. Попов. - Изд. 4-е, перераб. и доп. - СПб.: Изд-во «Профессия», 2003. - 752 с.
5. R. Iserman, M.Munchhof. Identification of Dynamic Systems: An Introduction with Applications. Springer-Verlag Berlin Heidelberg, 2011, 705 c.
6. R. Diversi, R. Guidorzi, U. Soverini. Identification of ARMAX models with noisy input and output. Preprints of the 18th IFAC World Congress, 2011.
7. IEC 62065. Maritime navigation and radiocommunication equipment and systems - Track control systems - Operational and performance requirements, methods of testing and required test results.
8. ISO 11674 2019-11. Ship and marine technology - Heading control systems.
9. Первые беспилотные пассажирские суда могут появится в России в 2024 году. - 19.09.2023. - Текст. Изображение: электронные // ТАСС: [сайт]. - URL: https://tass.ru/ekonomika/18781457 (Дата обращения: 12.01.2024 г.) - Режим доступа: раздел «Экономика и бизнес».
10. Sitronics Group успешно испытала автономное речное судно. - 13.11.2023. - Текст. Изображение: электронные // ТАСС: [сайт]. - URL: https://tass.ru/ekonomika/19267137 (Дата обращения: 12.01.2024 г.) - Режим доступа: раздел «Экономика и бизнес».
11. Fossen, Thor. Handbook of Marine Craft Hydrodynamics and Motion Control.//¶
John Wiley & Sons, 2011.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления угловой скоростью судна-катамарана при "сильных" маневрах | 2018 |
|
RU2693403C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДНА | 2021 |
|
RU2759068C1 |
| СПОСОБ ПАРАМЕТРИЧЕСКОЙ ИДЕНТИФИКАЦИИ МАТЕМАТИЧЕСКОЙ МОДЕЛИ СУДНА | 2010 |
|
RU2444043C1 |
| СИСТЕМА ИДЕНТИФИКАЦИИ ГИДРОДИНАМИЧЕСКИХ КОЭФФИЦИЕНТОВ МАТЕМАТИЧЕСКОЙ МОДЕЛИ ДВИЖЕНИЯ СУДНА | 2013 |
|
RU2535777C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ ГИДРОДИНАМИЧЕСКИХ КОЭФФИЦИЕНТОВ МАТЕМАТИЧЕСКОЙ МОДЕЛИ ДВИЖЕНИЯ СУДНА | 2013 |
|
RU2537080C1 |
| СПОСОБ ЗАДАНИЯ ТРАЕКТОРИИ И РЕЖИМОВ ДВИЖЕНИЯ СУДНА | 2014 |
|
RU2550236C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КУРСОМ СУДНА И СИСТЕМА АВТОРУЛЕВОГО ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2004 |
|
RU2282884C2 |
| ОПЫТОВЫЙ МОРСКОЙ МОДУЛЬНЫЙ КОМПЛЕКС | 2021 |
|
RU2760823C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ МАТЕМАТИЧЕСКОЙ МОДЕЛИ ДВИЖЕНИЯ СУДНА | 2000 |
|
RU2197016C2 |
| СИСТЕМА ПРОГНОЗИРОВАНИЯ БЕЗОПАСНОГО РАСХОЖДЕНИЯ СУДОВ | 2020 |
|
RU2752725C1 |


Изобретение предназначено для настройки управления судном по курсу. Способ включает выбор модели, определяющей зависимость угловой скорости циркуляции судна, являющейся выходным сигналом, от угла перекладки пера руля, являющегося входным сигналом. Модель записывается в пространстве состояний в дискретном времени и в виде ARMAX модели, определяются зависимости параметров модели от коэффициентов полиномов ARMAX модели, измеряются значения положения пера руля и угловой скорости циркуляции судна с шагом дискретизации при выполнении маневра идентификации параметров модели по курсу, вычисляются параметры модели судна по курсу для каждого значения угловой скорости циркуляции и угла перекладки, причем на каждом шаге дискретизации минимизируется квадрат ошибки между оценкой угловой скорости от ARMAX модели и измеренным выходным значением угловой скорости циркуляции судна, определяются временные участки, на которых оценки параметров модели судна по курсу асимптотически приближаются или колеблются вдоль средних значений, и вычисляются параметры модели как средневзвешенные значения рассчитанных параметров модели для каждого шага дискретизации. Технический результат состоит в обеспечении параметров для настройки системы управления судном по курсу. 2 з.п. ф-лы, 10 ил., 1 табл.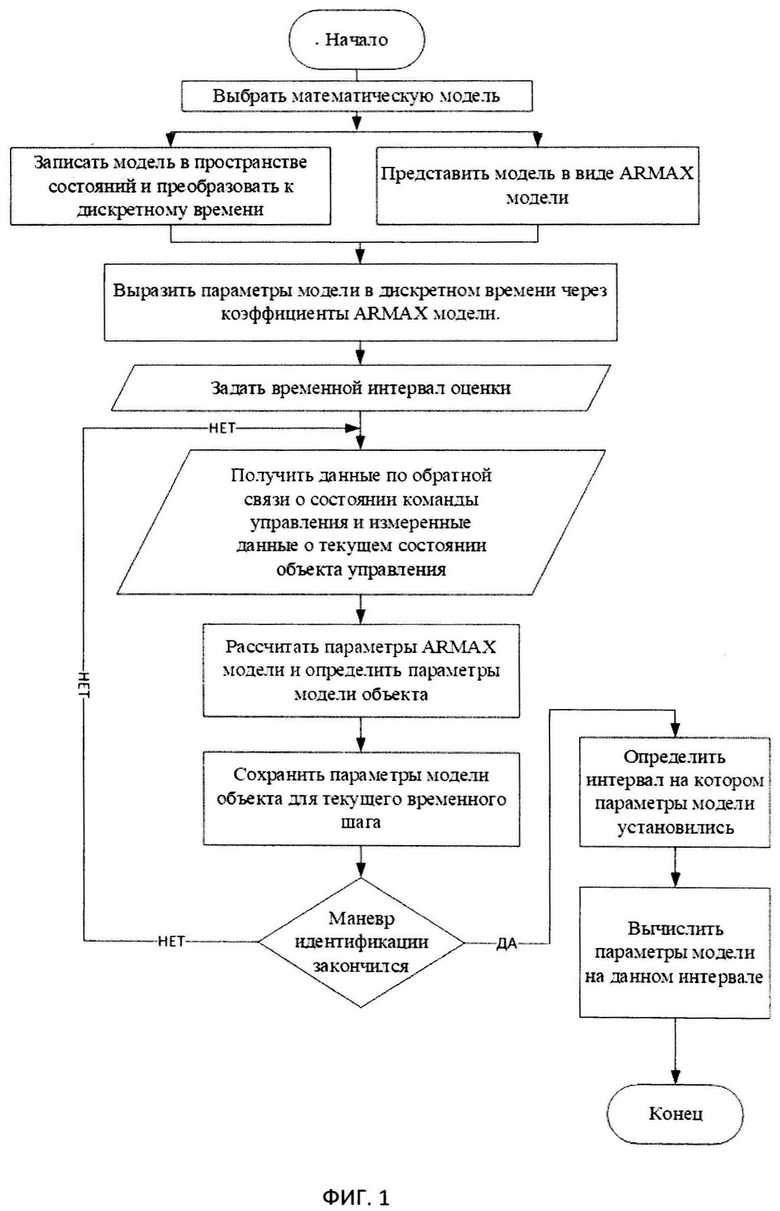
1. Способ настройки системы управления судном по курсу, включающий выбор математической модели судна по курсу, представляющей собой дифференциальное уравнение, и измерение выходного сигнала, отличающийся тем, что дифференциальное уравнение, определяющее зависимость угловой скорости циркуляции судна, являющейся выходным сигналом, от угла перекладки пера руля, являющегося входным сигналом, записывается в пространстве состояний в дискретном времени и в виде ARMAX модели, определяются зависимости параметров математической модели от коэффициентов полиномов ARMAX модели, измеряются значения положения пера руля и угловой скорости циркуляции судна с шагом дискретизации Δt при выполнении маневра идентификации параметров модели по курсу, включающего перекладку пера руля судна с нулевого положения на значение из диапазона от семи до пятнадцати градусов одного борта, достижение заданного положения пера руля, последующую перекладку пера руля на значение из диапазона от семи до пятнадцати градусов другого борта, достижение заданного положения пера руля и установление пера руля в нулевое положение, вычисляются параметры математической модели судна по курсу для каждого значения угловой скорости циркуляции и угла перекладки, причем на каждом шаге дискретизации минимизируется квадрат ошибки между оценкой угловой скорости от ARMAX модели и измеренным выходным значением угловой скорости циркуляции судна, определяются временные участки, на которых оценки параметров модели судна по курсу асимптотически приближаются или колеблются вдоль некоторых средних значений, и вычисляются параметры математической модели как средневзвешенные значения рассчитанных параметров модели для каждого шага дискретизации Δt, которые относятся к ранее определенному временному участку, и вычисляются значения параметров регулятора системы управления по курсу на основе ранее выбранной математической модели судна по курсу и вычисленных значений параметров модели.
2. Способ по п. 1. отличающийся тем, что в качестве математической модели судна по курсу используют математическую модель Номото 1-го либо модель Номото 2-го порядка.
3. Способ по п. 1, отличающийся тем, что при выполнении маневра идентификации параметров модели судна используют циркуляцию судна при переходе с галса на галс.
| СПОСОБ ПАРАМЕТРИЧЕСКОЙ ИДЕНТИФИКАЦИИ МАТЕМАТИЧЕСКОЙ МОДЕЛИ СУДНА | 2010 |
|
RU2444043C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ЛИНЕАРИЗОВАННОГО ДИНАМИЧЕСКОГО ОБЪЕКТА | 2003 |
|
RU2256950C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СУДНОМ ПО КУРСУ И ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2012 |
|
RU2519315C2 |
| US 6611737 B1, 26.08.2003. | |||

