Изобретение относится к машиностроению, в частности к прямолинейно-направляющим механизмам, и может быть использовано в шагающих, некруглых, гребных колесах и других устройствах.
Известен прямолинейно-направляющий механизм, содержащий стойку, шарнирно соединенный с ней кривошип, на котором поворотно установлено звено, связанное с шестерней, входящей во внутреннее зацепление с неподвижным колесом, причем с передаточным отношением между кривошипом и звеном, равным - 3 [1].
Недостатком указанного механизма является невозможность получения прямолинейных участков на траектории движения звена с передаточным отношением между кривошипом и звеном, отличным от - 3, что ограничивает область его использования.
Целью изобретения является расширение области применения.
Указанная цель достигается тем, что прямолинейно-направляющий механизм, содержащий стойку, кривошип, на котором поворотно установлено звено, кинематически связанное с кривошипом определенным передаточным отношением, где кинематическая связь между кривошипом и звеном выполнена (приведены варианты кинематических схем и для удобства восприятия описания приведенных вариантов в каждом тексте варианта указан номер описываемой фигуры),
либо посредством установки на кривошипе колеса, связанного со звеном и входящего в зацепление с одной из шестерен, установленных на смонтированной в кривошипе оси, из которых другая связана с неподвижной шестерней, при этом передаточное отношение между кривошипом и звеном Uнд за цикл поворота кривошипа выбрано равным одному числу из ряда натуральных чисел больше единицы, которое в цикле поворота кривошипа переменное (фиг. 1 и 2),
либо посредством цепной передачи между звеном и звездочкой, соединенной с колесом, шарнирно установленным на оси в кривошипе и входящим во внутреннее зацепление с неподвижным некруглым колесом, при этом передаточное отношение между кривошипом и звеном за цикл поворота кривошипа выбрано равным одному числу из ряда натуральных чисел больше единицы, которое в цикле переменное (фиг. 3),
либо посредством установки на кривошипе колеса, связанного со звеном и входящего в зацепление с одной из шестерен, установленных на оси, шарнирно смонтированной в стойке, из которых другая шестерня на оси связана с одной из шестерен, установленных на валу, смонтированном в стойке параллельно упомянутой оси, другая шестерня на валу связана с шестерней, прикрепленной соосно к кривошипу, шарнирно установленному на упомянутой оси, при этом передаточное отношение между кривошипом и звеном за цикл поворота кривошипа выбрано равным одному числу из ряда натуральных чисел больше единицы, которое в цикле переменное (фиг. 4),
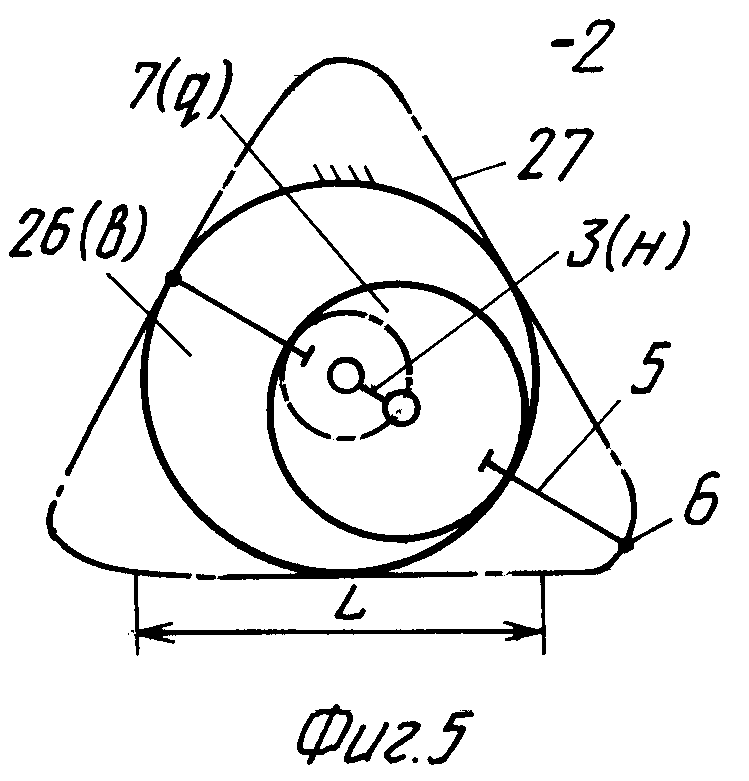
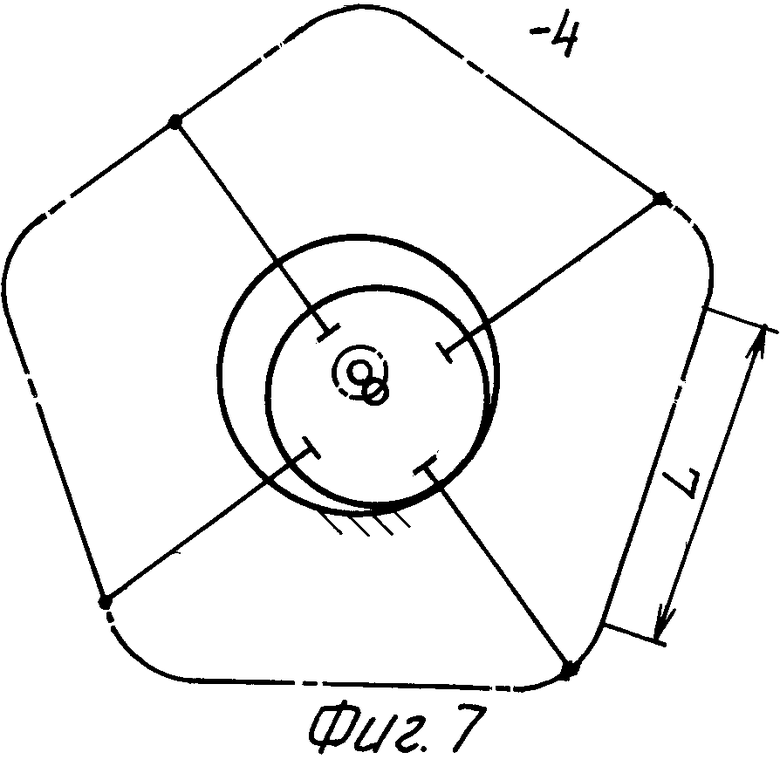
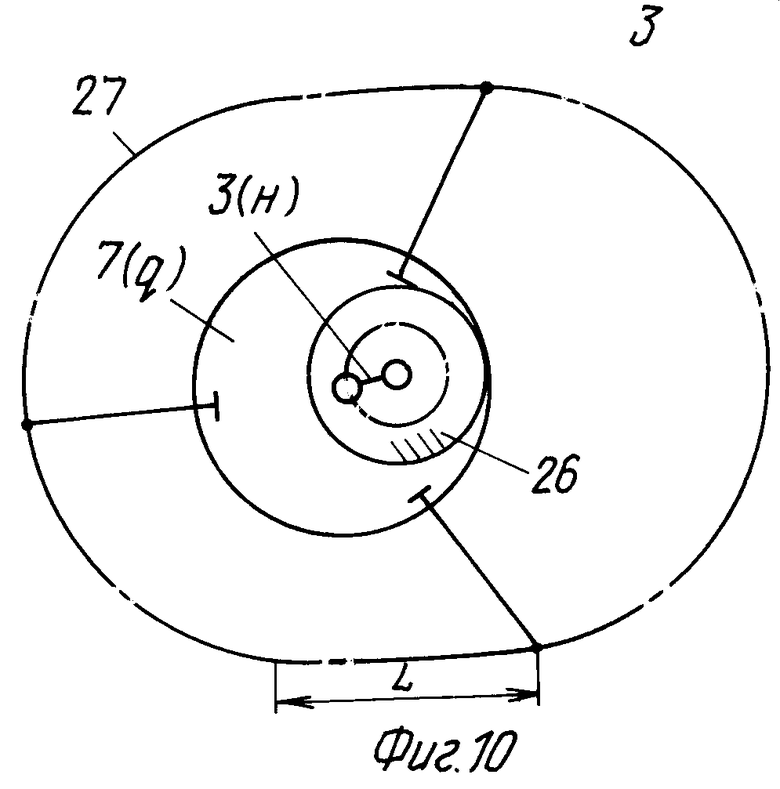
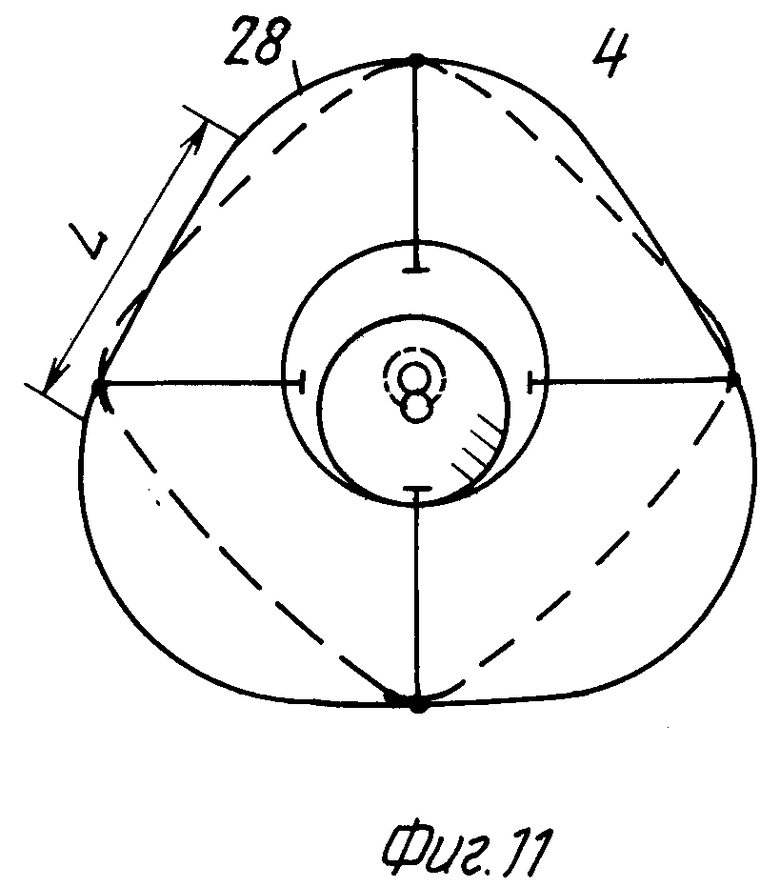
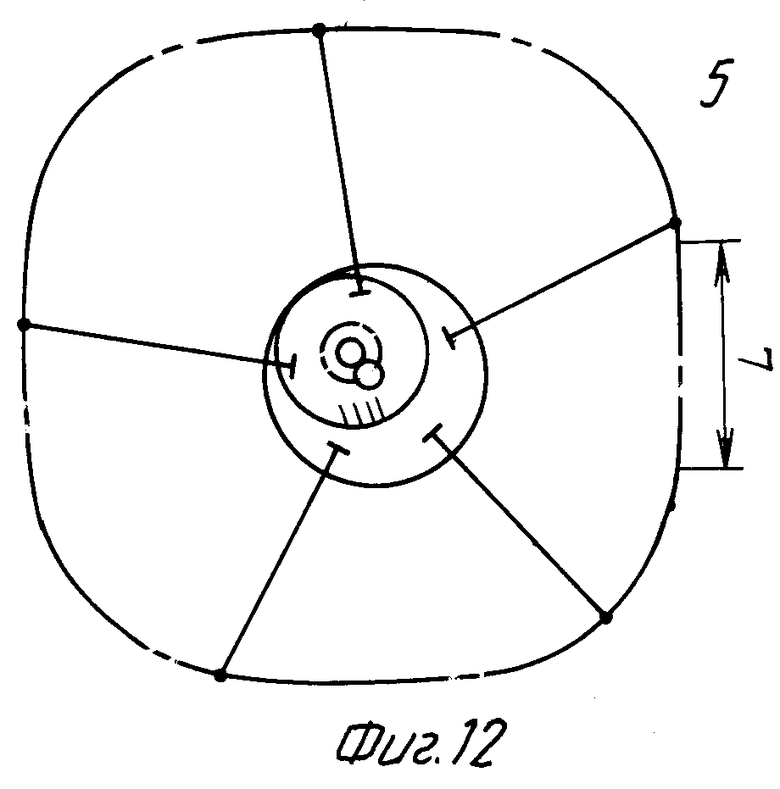
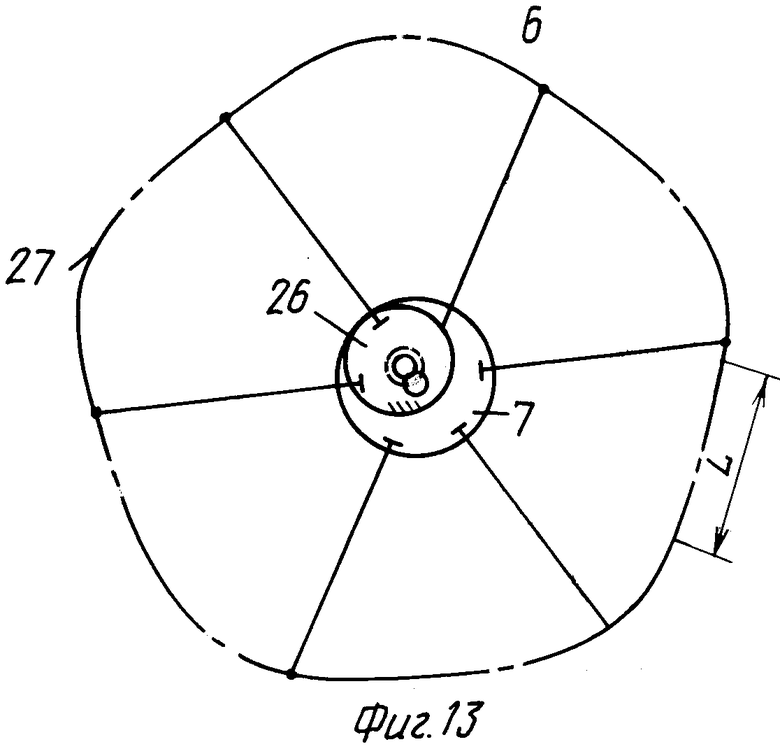
либо посредством установки на кривошипе колеса (сателлита), связанного со звеном и входящего во внутреннее зацепление с неподвижным колесом, при этом передаточное отношение между кривошипом и звеном за цикл поворота кривошипа выбрано равным одному числу из ряда чисел - 2, 2, -3, 3, -4, 4 и т.д., которое в цикле постоянное (фиг. 5 - 13),
либо посредством паразитной шестерни, установленной на кривошипе и входящей в зацепление с шестернями звена и колеса, шарнирно установленного на оси в кривошипе и входящего во внутреннее зацепление с неподвижным некруглым колесом, при этом передаточное отношение между кривошипом и звеном за цикл поворота кривошипа выбрано равным одному числу из ряда натуральных чисел больше единицы, которое в цикле переменное (фиг. 3).
Во всех вариантах в зависимости от назначения прямолинейно-направляющего механизма звено с колесом могут быть соединены жестко или посредством упругой связи.
Указанный технический результат в решении первого варианта достигается в совокупности следующих существенных признаков:
1. стойка - общий признак;
2. кривошип - общий;
3. сателлит (шестерня) - общий;
4. звено, связанное с сателлитом, - общий;
5. сателлит, входящий в зацепление с одним из колес, установленных на смонтированной в кривошипе вала оси, из которых другое колесо входит в зацепление с неподвижной шестерней, - отличительный признак;
6. отношение угловых скоростей кривошипа и звена равно одному числу из ряда натуральных чисел больше единицы - отличительный;
7. передаточное число в цикле переменное - отличительный.
В данном варианте совокупность известных в прототипе признаков 1 oC 4 и отличительных 5 oC 7 позволяет получить упомянутый положительный результат.
В решении второго варианта, кроме признаков 1 oC 3, 6 и 7 варианта 1, присутствуют еще признаки:
8. звено связано посредством цепной передачи с колесом, входящим во внутреннее зацепление с неподвижным колесом, - отличительный признак;
9. колеса выполнены некруглыми - отличительный.
Перечисленная совокупность признаков также позволяет получить указанный технический результат.
Для этого варианта кинематическая схема с использованием паразитной шестерни не приведена.
В решении третьего варианта, кроме признаков 1 - 4 прототипа и признаков 6 и 7 варианта 1, присутствует признак 10.
10. Кривошип снабжен зубчатым колесом, связанным через зубчатые звенья, с колесом, установленным на звене - отличительный признак.
Признаки этого варианта также позволяют получить указанный технический результат.
В решении четвертого варианта, кроме признаков 1 oC 4 варианта 1, присутствуют признаки:
11. звено связано с колесом, входящим во внутреннее зубчатое зацепление с неподвижным колесом, - общий признак;
12. передаточное отношение кинематической связи между кривошипом и звеном выбрано равным одному числу из ряда чисел -2, 2, -3, 3, -4, 4 и т.д. - отличительный признак;
13. передаточное отношение в цикле постоянное - общий.
Совокупность этих признаков также позволяет получить упомянутый технический положительный результат.
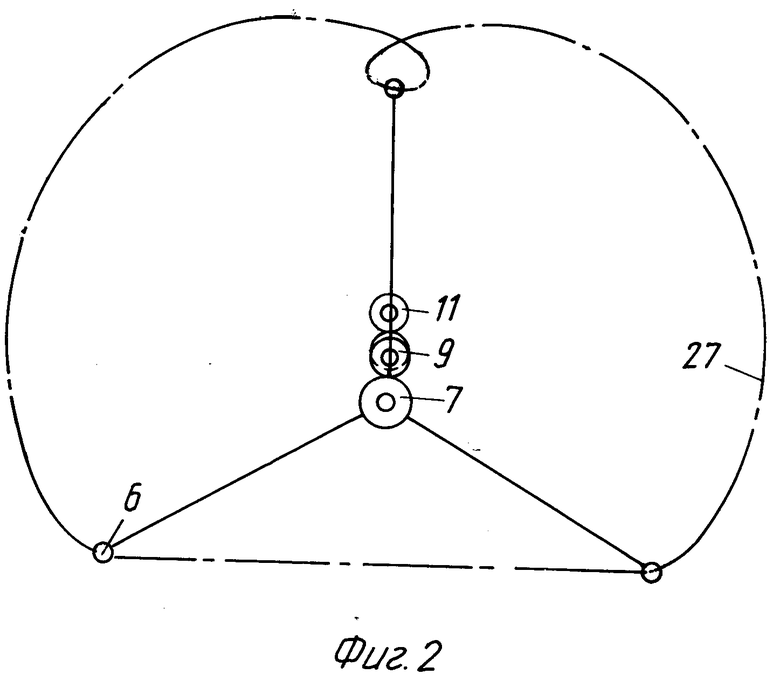
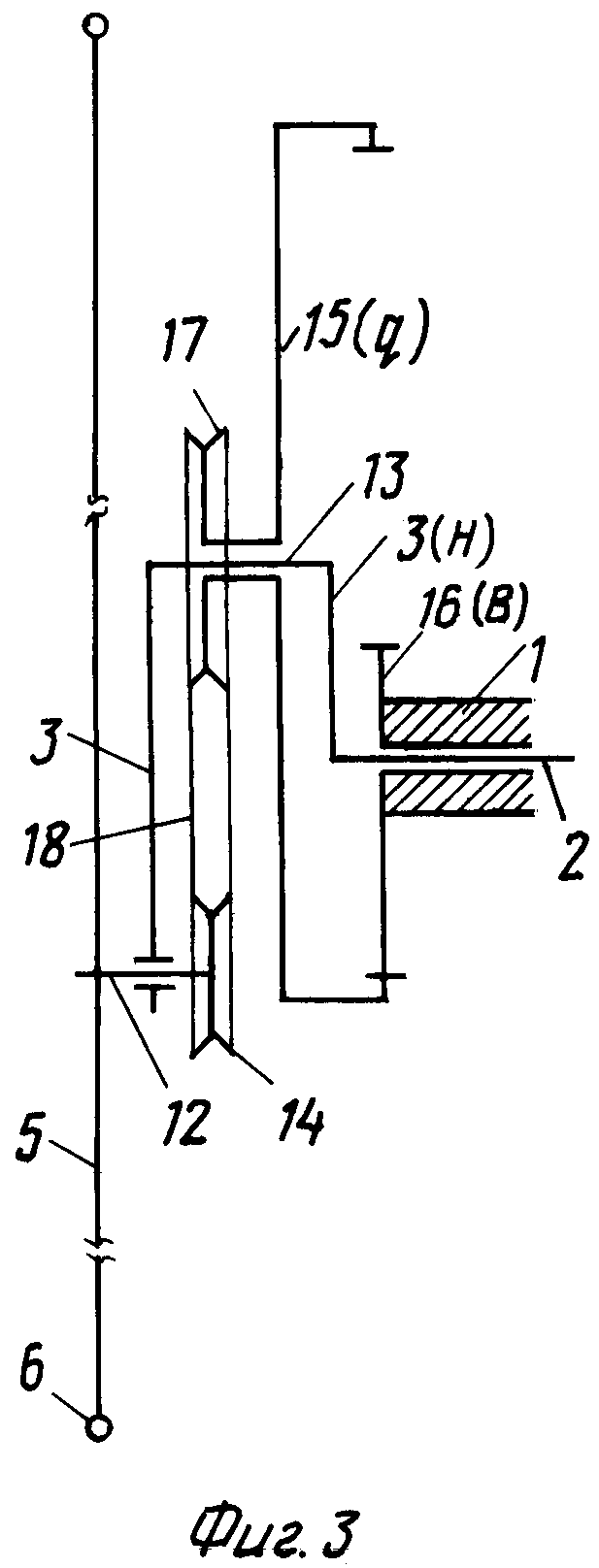
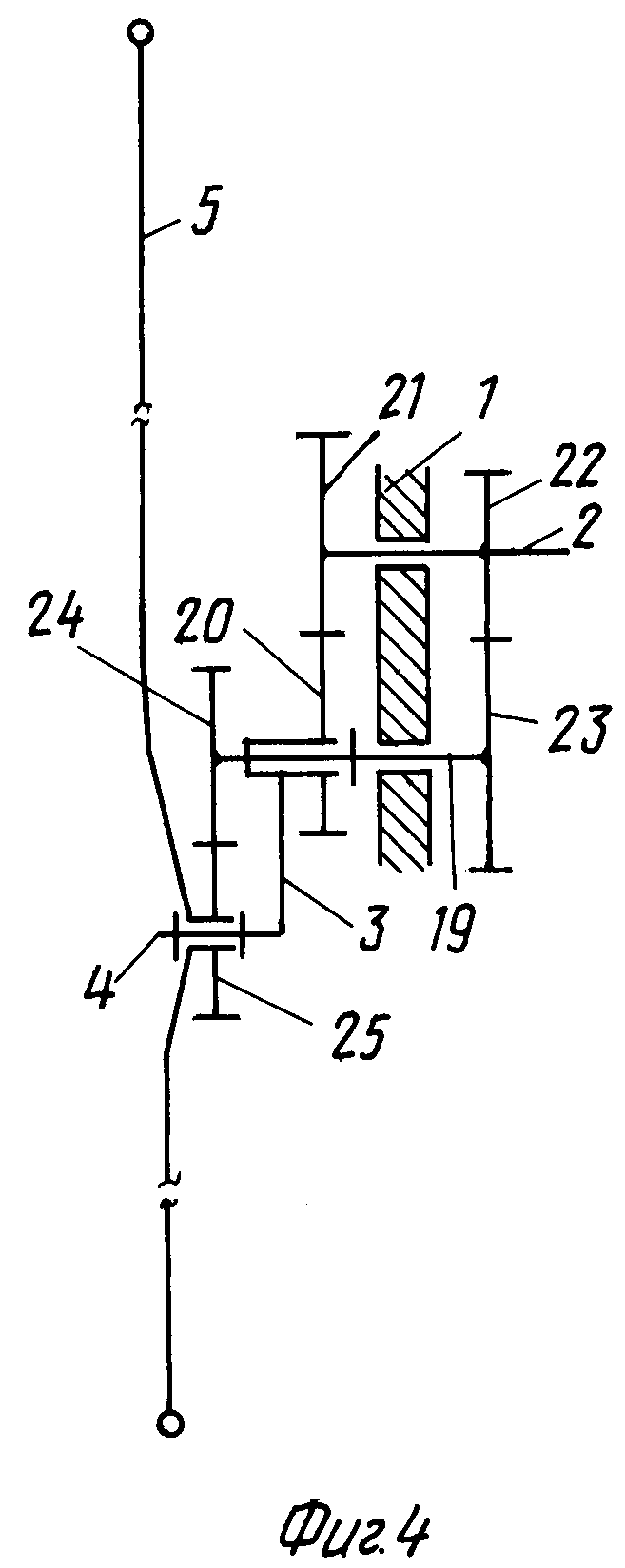
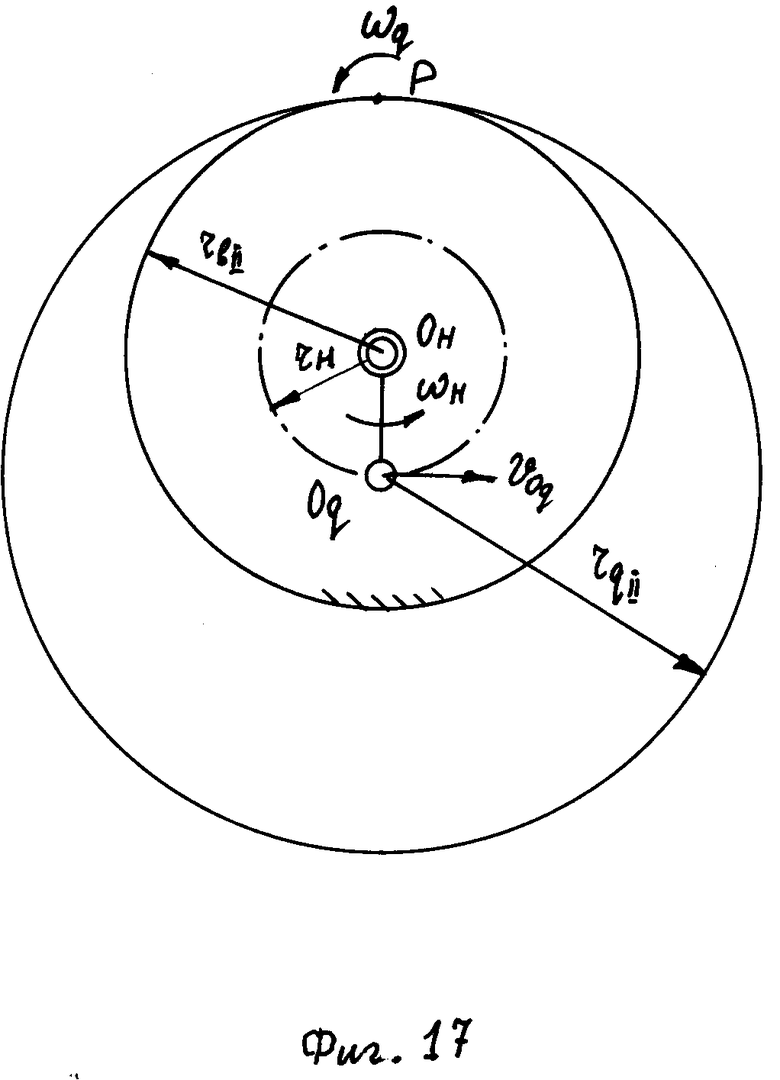
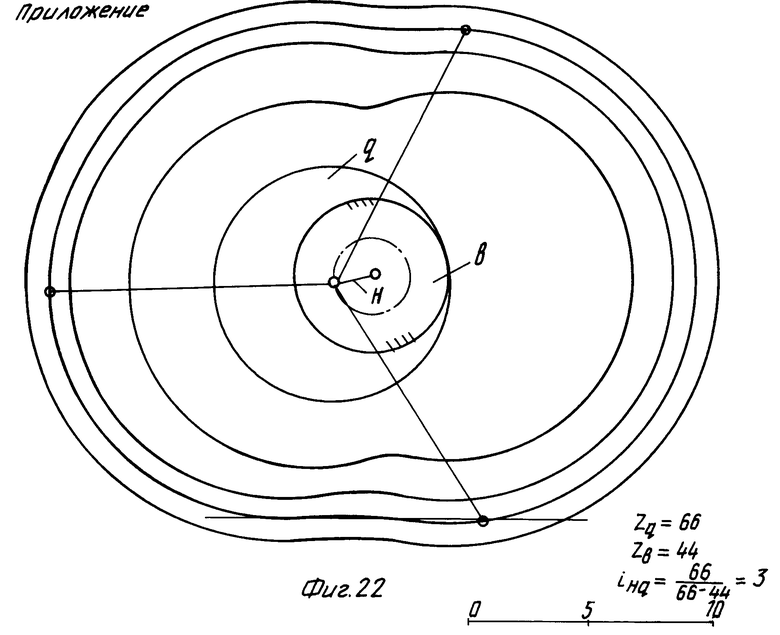
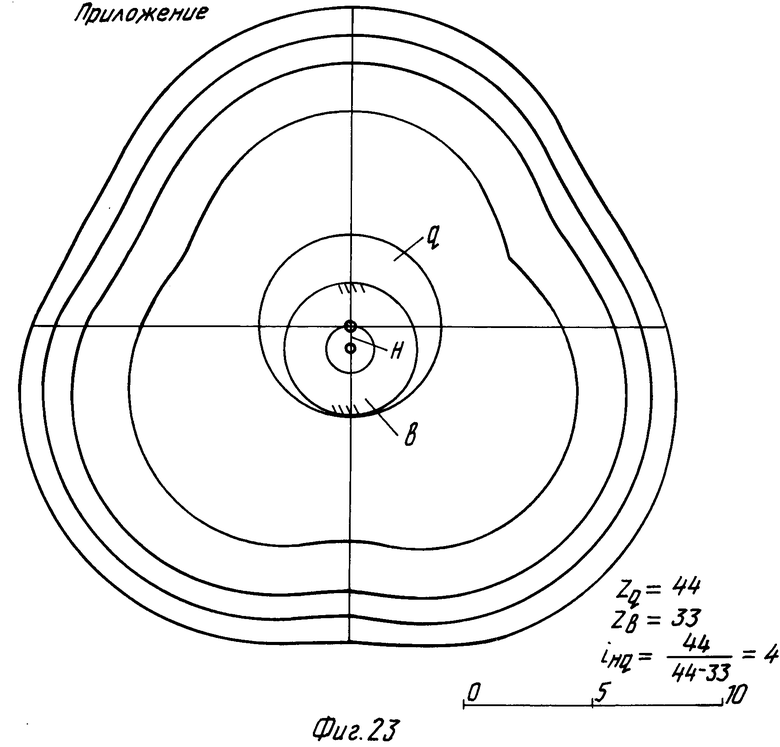
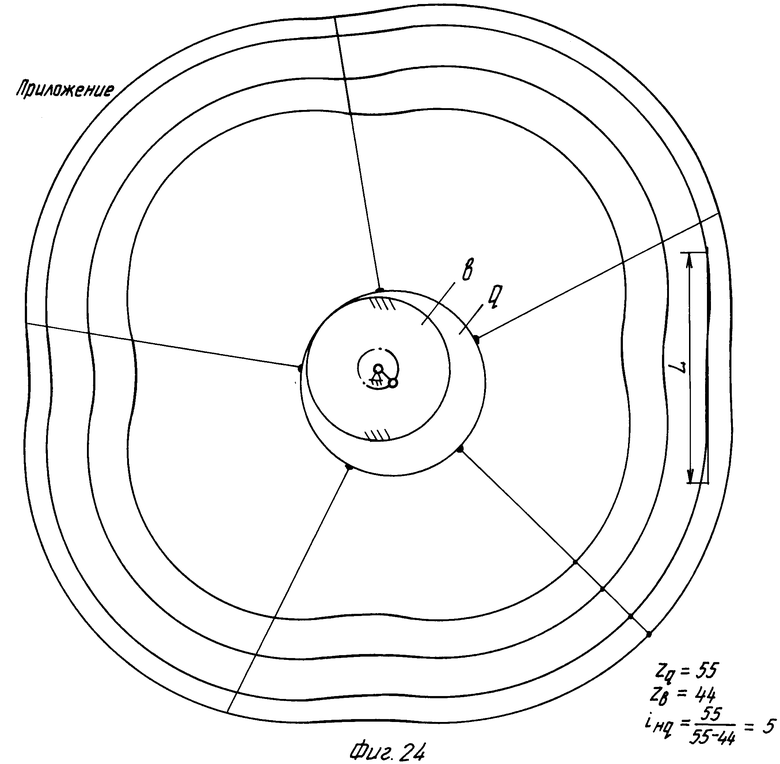
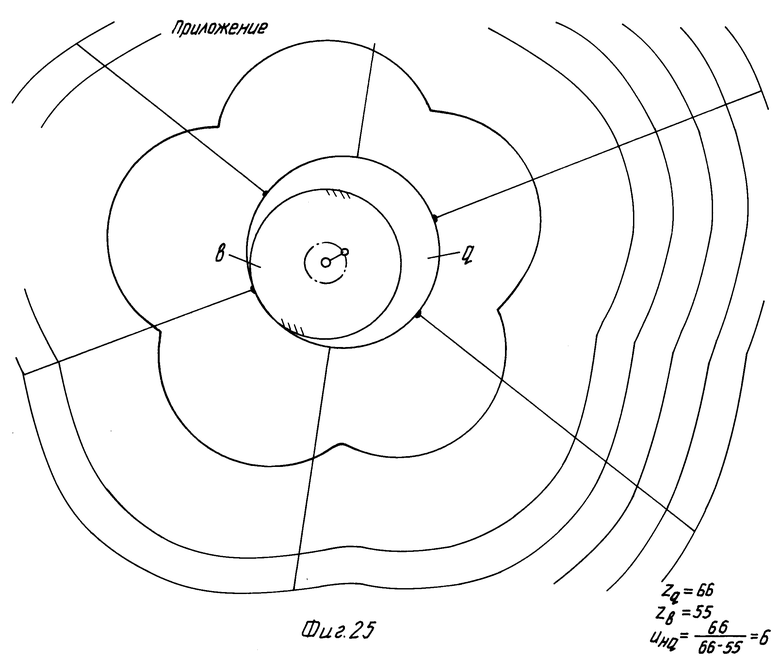
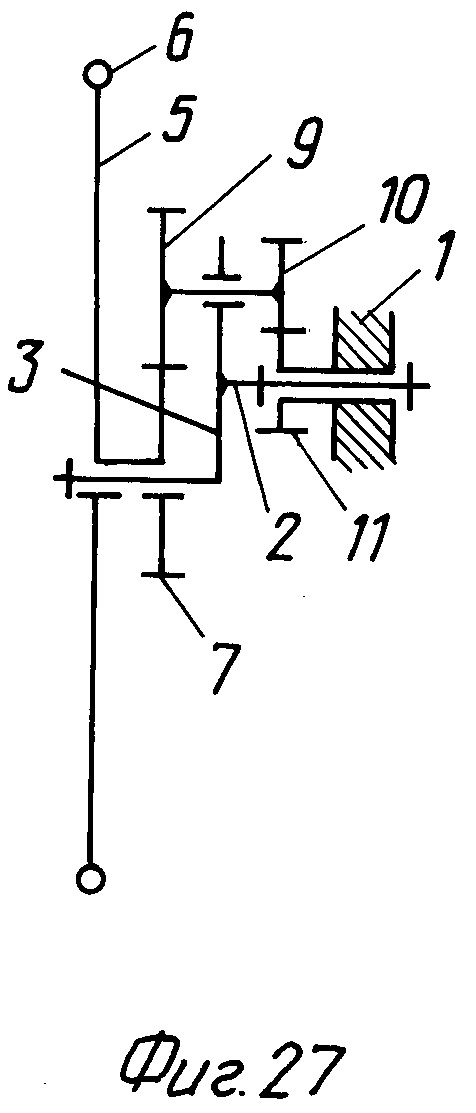
На фиг. 1, 27 изображена кинематическая схема механизма варианта 1; на фиг. 2, 26 - то же, в другой проекции и траектория движения выходных элементов механизма; на фиг. 3, 4 - варианты II и III; на фиг. 5 - 13 - варианты IV с траекторией движения точки звена для разных передаточных отношений; на фиг. 14 изображены профили некруглых колес варианта I для звена с четырьмя выходными элементами; на фиг. 15 - то же, что и на фиг. 14 для варианта II; на фиг. 16 изображена кинематическая схема для аналитического расчета характеристик звеньев механизма вариантов I oC III; на фиг. 17 - для аналитического определения профилей некруглых колес b и g варианта II; на фиг. 18 - 25 приведены траектории движения точек звена, полученные на макетах для варианта IV.
Прямолинейно-направляющий механизм варианта I (фиг. 1, 2, 26, 27) содержит стойку 1, установленный в ней на валу 2 кривошип 3(H), на шипе 4 которого шарнирно установлено звено 5 (в качестве примера на фиг. 2 оно выполнено многолучевым) с выходными элементами 6. К звену 5 прикреплено колесо 7. В кривошипе 3 смонтирована двойная полуось 8, на которой установлены шестерня 9 и некруглая шестерня 10(q), входящие соответственно в зацепление с колесом 7 и некруглым неподвижным колесом 11(b). Длины профилей центроид колес 10(q) и 11(b) выбраны равными.
Схема варианта II (фиг. 3) содержит основание 1, кривошип 3(H), на котором параллельно валу 2 смонтированы оси 12 и 13. На оси 12 установлено звено 5 с прикрепленной к нему звездочкой 14. На оси 13 установлено некруглое колесо 15(q), входящее во внутреннее зацепление с неподвижной шестерней 16(b). С некруглым колесом 15 сварена звездочка 17, связанная цепной передачей 18 со звездочкой 14.
Схема варианта III (фиг. 4) содержит основание 1, параллельно смонтированные в основании 1 вал 2 и ось 19. На оси 19 поворотно установлен кривошип 3 с прикрепленным к нему некруглым колесом 20, входящим в зацепление с одной из шестерен 21, установленных на валу 2, выполненной с центроидой, равной или кратной центроиде колеса 20. Другая шестерня 22, установленная на валу 2, входит в зацепление с шестерней 23, которая установлена на оси 19. На оси 19 установлена вторая шестерня 24 и входит в зацепление с колесом 25 звена 5.
Схема варианта IV содержит стойку 1, установленный в стойке 1 на валу 2 кривошип 3(H), на шине 4 которого установлен сателлит 7(q), входящий во внутреннее зацепление с неподвижным колесом 26(b). С сателлитом 7 /жестко или упруго/ связано звено 5.
Механизм работает следующим образом.
Вариант I. При равномерном вращении кривошипа 3, например на один оборот против часовой стрелки, некруглое колесо 10, двигаясь по окружности на кривошипе 3, перекатывается по неподвижному зубчатому колесу 11, приводя во вращение также на один оборот с переменной угловой скоростью колесо 9. Вращение колеса 9 через колесо 7 передается звену 5, которое, вращаясь с переменной угловой скоростью против часовой стрелки, совершит поворот на угол, равный отношению 360o к количеству выходных элементов 6 звена 5. Таким образом на фиг. 1 и 2 при повороте кривошипа 3 на один оборот звено 5, двигаясь по окружности, поворачивается на 120o, описывая выходными элементами 6 траекторию 27, на которой имеется прямолинейный участок L.
Вариант II. На фиг. 3 при кратности зубьев колес q и b, равной двум, то есть UgbII = 1/2, при вращении кривошипа 3(H) по часовой стрелке на один оборот некруглое колесо 15(q), сцепляясь с шестерней 16(b), поворачивается по часовой стрелке на 180o с переменной угловой скоростью. Вращение колеса 15 через цепную передачу 18 передается на звено 5, которое, вращаясь, выходными элементами 6 описывает траекторию с прямолинейным участком, как на фиг. 2.
Вариант III. На фиг. 4 посредством шестерен 22, 23 и 24, 25 достигается необходимое передаточное отношение между угловыми скоростями кривошипа 3 и звена 5, а посредством некруглых колес 21 и 22 с равными или кратными центроидами достигается переменная угловая скорость между кривошипом 3 и звеном 5. Поэтому при равномерном повороте вала 2 на один оборот по часовой стрелке кривошип 3 поворачивается против часовой стрелки с переменной угловой скоростью также на один оборот. Одновременно посредством колес 22 и 23, а также шестерен 24 и 25 достигается необходимое передаточное отношение вращения звена 5. Звено 5, поворачиваясь с переменной угловой скоростью на шипе 4 кривошипа 3, выходными элементами описывает схожую, как на фиг. 2 траекторию, на которой имеется прямолинейный участок L.
Вариант IV. На фиг. 5 - 13 в случае соблюдения необходимого передаточного отношения между кривошипом и звеном при вращении кривошипа 3 колесо 7, взаимодействуя с неподвижным колесом 26, приводит в равномерное вращение звено 5, у которого на траекториях 27 движения некоторых точек 6 имеются приблизительно прямолинейные участки.
Приведенные для иллюстрации отдельные возможные варианты кинематических схем механизма не исчерпывают и других возможных вариантов схем, что подтверждается разными приведенными в описании и в приложении вариантами схем.
Данное изобретение может найти применение при создании шагающих, некруглых колес (на фиг. 6 и 11 штриховой линией 28 изображены возможные профили некруглых колес), гребных колес, а также и в других устройствах.
Для определения возможности осуществления и промышленного применения предложенных вариантов технических решений приведены алгоритм решения и расчет характеристик звеньев механизма.
Вариант 1 (фиг. 16).
Из точки M проведем окружность с радиусом R. Тремя радиусами MB10, MB20, MB30 разделим окружность на равные части. Получим "блок радиусов" (звено).
По концам нижних радиусов проведем хорду B10 - B20. Полученный "блок" установим шарнирно на шипе кривошипа, смонтированного на неподвижной оси O, с радиусом, равным половине высоты сегмента ND, полученного на окружности.
Повернем кривошип равномерно на один оборот (цикл), то есть ωн= 360 против часовой стрелки так, чтобы конец радиуса MB10 (точка B1) скользил по хорде B10 - B20. Замечаем, что "блок" поворачивается против часовой стрелки с переменной угловой скоростью ωб , причем за цикл на 120o (то есть ωб= 120° ). Отсюда за цикл поворота кривошипа средняя величина передаточного отношения между кривошипом и "блоком" равна отношению  , а при числе радиусов в "блоке", равном четырем, это отношение
, а при числе радиусов в "блоке", равном четырем, это отношение  .
.
Таким образом для получения прямого участка на траектории движения выходных элементов, расположенных на концах упомянутых радиусов "блока", необходимо, чтобы при двух лучах в "блоке" среднее передаточное отношение между кривошипом и блоком равнялось двум, при трех лучах - трем, при четырех - четырем и так далее. При этом в цикле поворота кривошипа передаточное отношение переменное.
Для определения угловой скорости "блока" ωб от угла поворота кривошипа ωн проведем следующие вычисления для "блока" с четырьмя радиусами.
 .
.
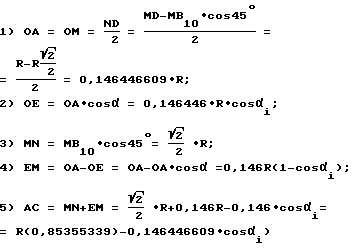
Так же из тр-ка B1AC определим AC.
6) AC = AB1•cosγi= R•cosγi .
Пользуясь уравнениями 5 и 6, определим cosγi и γi .
.
Определим также .
.
Из уравнения 10 определим sinγi и γi .
.
Для "блока" с тремя радиусами sinγi определяется из выражения .
.
Для определения величины отклонения NN' точки B1 (объяснено ниже) от хорды B10B20 /см. фиг. 16/, определим ON'.
 .
.
Пользуясь уравнением 7, проверим изменение угла γi в случае движения точки B1 равномерно строго по хорде B10 - B20.
Так, при i=2 (см. таблицу) ⇒α = 2,5o.
Определим cosγi= (0,85355-0,14644•cos2,5) = 0,70725, , отсюда γ2= 44,9887 .
Определим Δγ2= γ1-γ2= 45-44,9887 = 0,0113 ,
тогда .
.
То есть в начальный период вращения кривошипа требуется большое значение передаточного отношения и для осуществления такого значения  пришлось бы использовать механизм со сложной кинематической схемой.
пришлось бы использовать механизм со сложной кинематической схемой.
В то же время, если после поворота кривошипа на Δα2 "блок" дополнительно повернем, то есть больше чем Δγ2 , то точка B1 на фиг. 16 сместится вниз от линии хорды B10B20 в положение  , соответственно и точки N и C - в положения N' и C'.
, соответственно и точки N и C - в положения N' и C'.
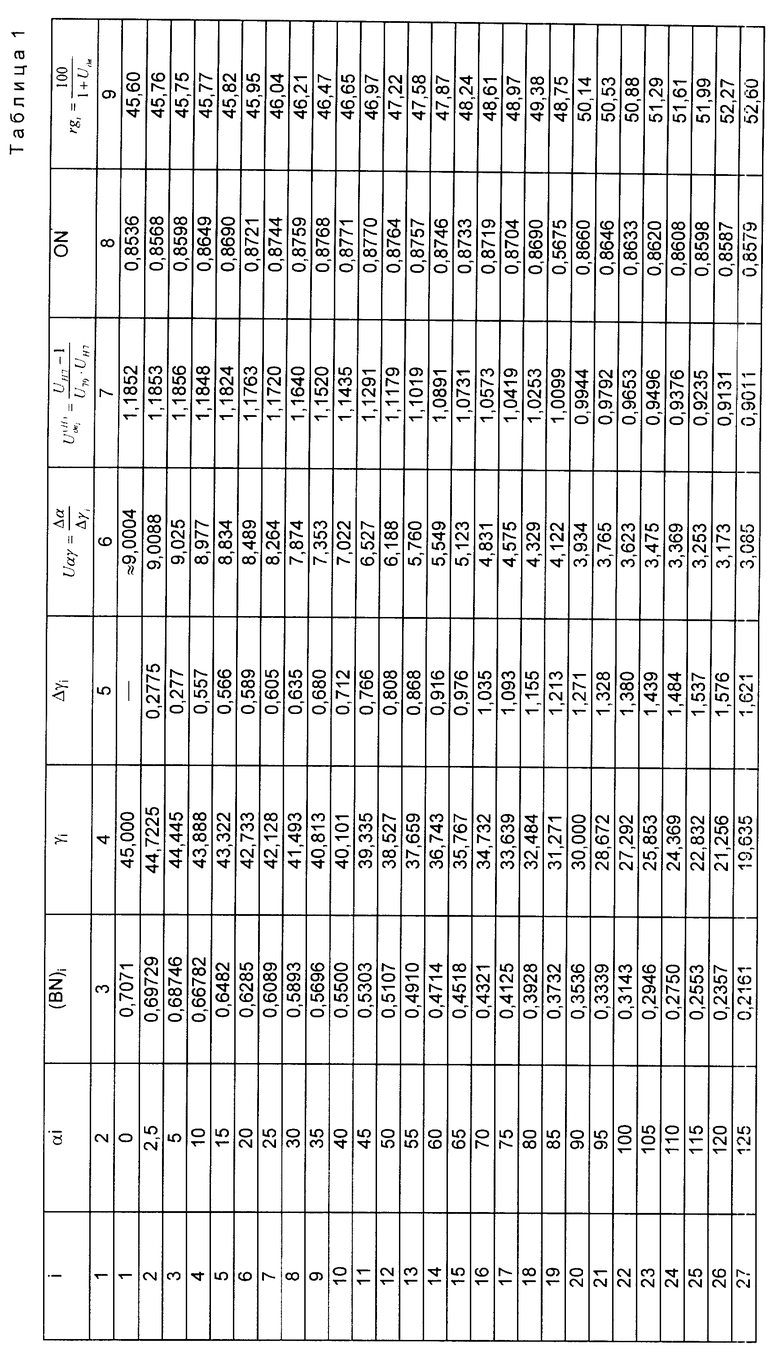
Такой характер движения точки B1 можно осуществить, если угол γi определить пользуясь уравнениями 11 или 12, где заранее заданы величины αi и (B1N)i . Так, в таблицу занесены значения угла γi , определенные посредством уравнения 11. При этом величина отклонения NN' определена из формулы 13. Это отклонение после всех расчетов видно и максимально примерно при α = 40° и равно 2,75%.
Последовательность расчета.
Допустим, при равномерном вращении кривошипа на пол оборота от 0 до 180o (вторая половина аналогична первой), точка двигается по хорде вправо равномерно.
а/ Разделим отрезок B10N на 180 равных частей, то есть определим отрезок длины ΔB1, , на которую перемещается точка B1 при каждом последующем повороте кривошипа на угол Δα = 1° .
 .
.
б/ Для удобства расчета примем R=1 и определим отрезок (B1N)i для каждого αi , где  .
.
в/ Занесем значения αi и (B1N)i в таблицу.
г/ Подставляя в выражение 11 значения (B1N)i и αi , взятые из таблицы, определим значения γi .
д/ В каждый раз, после поворота "блока" на последующий угол Δα , определим величину изменения угла Δγi= γ(i-1)-γi , далее - среднее передаточное отношение в данном промежутке
С учетом дополнительного поворота "блока" для i=2 определим новое значение (Uαγ)2 . Так как при i=2, α = 2,5° , (B1N)2= 0,6972858, то подставляя их в выражение 11 определим γ2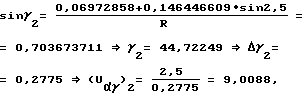 ,
,
то есть значительно ниже, чем в первом случае, где эта величина была равна 221, 24. Вычисленные значения занесем в таблицу.
Теперь выберем кинематическую схему, изображенную на фиг. 1 и 2, где из пары колес b и q зубчатое колесо q выбрано с профилем, кратным 2πrв . Эти колеса служат для обеспечения переменного передаточного отношения в цикле поворота кривошипа, то есть эти колеса или одно из этих колес некруглое.
Воспользовавшись методом расчета, приведенным в литературе (см. Артоболевский И.И. Теория машин и механизмов. - М.: Наука. 1988, с. 154 - 156), найдем формулы для определения передаточных отношений между шестернями. Тогда  .
.
Так как  , определим U
, определим U .
.
Известно для "блока" с четырьмя радиусами среднее значение передаточного отношения UH7=4 и при кратности профилей колес q и b, равной одной, среднее значение U .
.
Подставляя эти значения в выражение 17, определим необходимое передаточное отношение между колесами 7 и 9, то есть .
.
Если кратность профилей колес q и b равна 2,  .
.
Однако в цикле поворота кривошипа текущее значение U

В выражении 18 имеется UH7 - передаточное отношение между кривошипом и "блоком" для текущего i. В таблице также имеется это передаточное отношение, записанное в виде (Uαγ)i, , то есть UH7= (Uαγ)i .
Подставляя значение (Uαγ)i из таблицы и  в выражение 18, определим переменное значение
в выражение 18, определим переменное значение  и занесем в таблицу. Для i = 2
и занесем в таблицу. Для i = 2 .
.
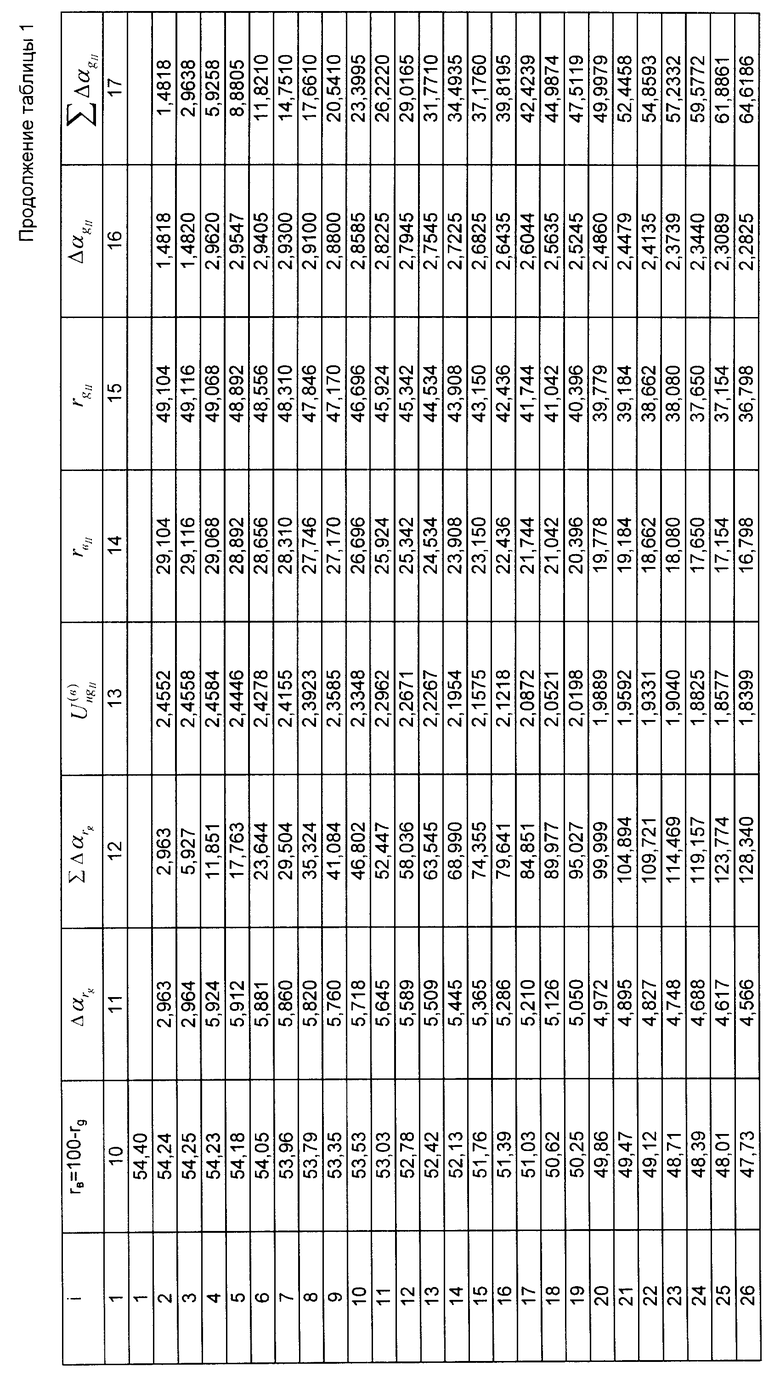
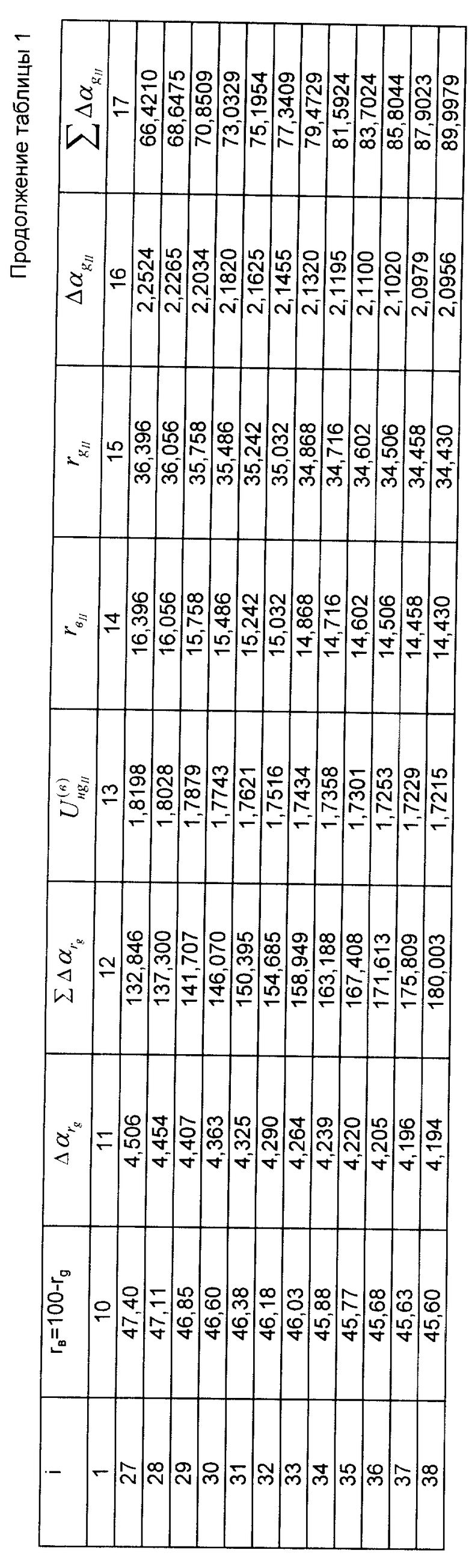
Теперь, используя данные таблицы, можно определить формы профилей колес b и q.
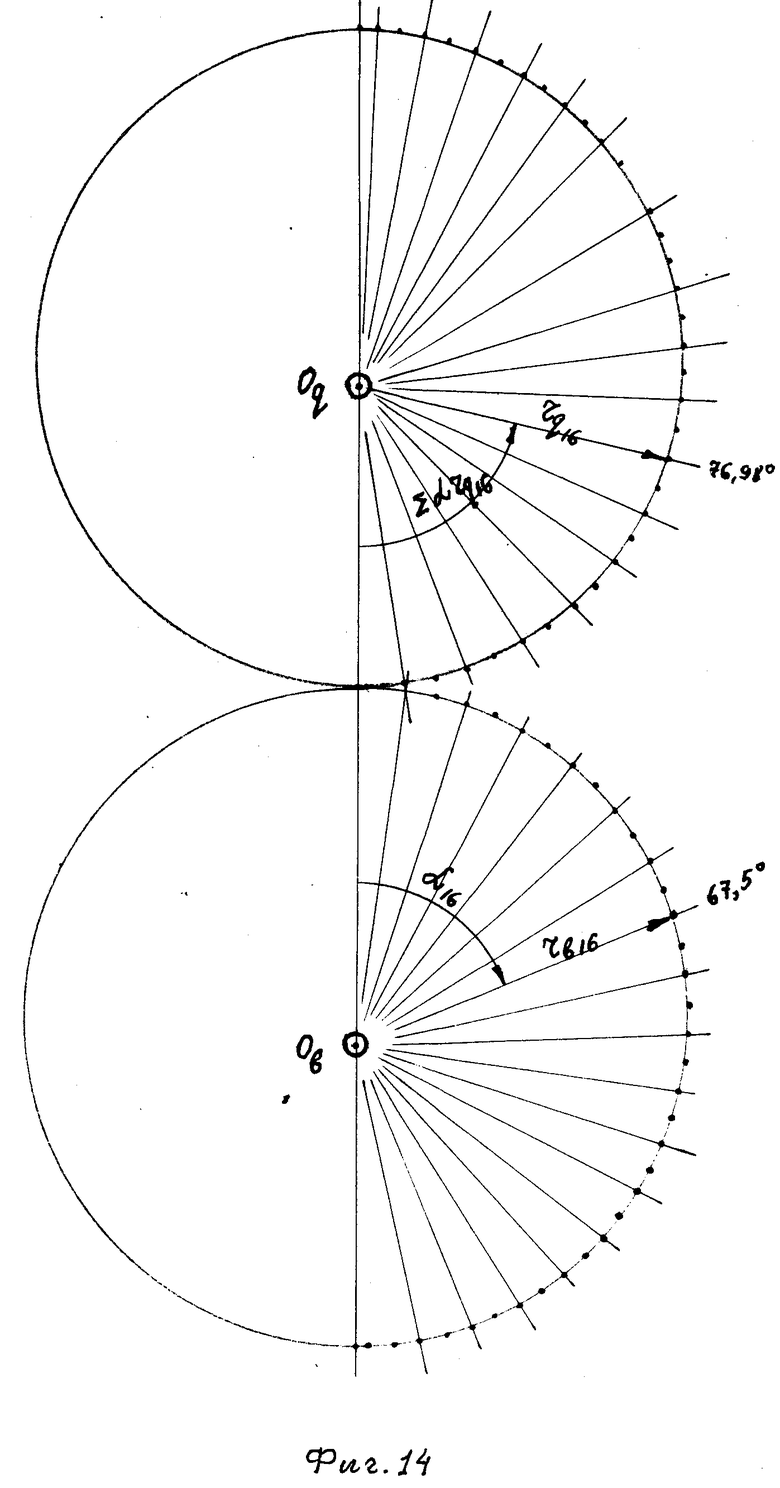
Для удобства (фиг. 14) расстояние между осями колес b и q примем равным числу 100, тогда rв+rq = 100 ⇒ rв= 100 = rq .
Так как  , то подставляя rb в данное выражение получим
, то подставляя rb в данное выражение получим .
.
Далее из выражения 19 определим rq. Полученные значения rq и rb занесем в таблицу.
Так как каждый раз при повороте водила на очередной угол /шаг/ Δα , некруглое колеса b и q каждые сопрягаются по начальной окружности на длину дуги, определяемой выражением Δα•(rвi , то, если обозначим шаг угла поворота колеса q Δ(αrq)i , этот угол определяется из выражения
Δα•(rв)i= Δ(αrq)i•(rq)i,
отсюда
Полученные данные занесем в таблицу
Например, для i = 2, Δα2 = 2,5°
Теперь, используя данные таблицы, можно начертить профили колес b и q.
Для этого (фиг. 14) из точки вращения Ob колеса b от мгновенного центра вращения P каждый раз, двигаясь по часовой стрелке на угол αi(Σαi), проведем радиальные лучи и на этих лучах отложим величины радиуса (rb)i. Получим профиль колеса b. Таким же образом для колеса q, двигаясь против часовой стрелки от точки P, построим профиль колеса q.
Например, при i = 2, для колеса b α2 = 2,5°
(rв)2= 54,24
Для колеса q ΣΔ(αrq)2= 2,9633, , (rg)2 = 45,76
На фиг. 14 изображены профили колес b и q при кратности их, равной единице для "блока" с четырьмя радиусами.
Так как (Uαγ)i таблицы есть среднее значение в промежутке Δαi и Δγi ,то радиальные лучи на фиг. 14 проведены под углом  , то есть посередине i-го угла Δαi и Δγi
, то есть посередине i-го угла Δαi и Δγi
Вариант II.
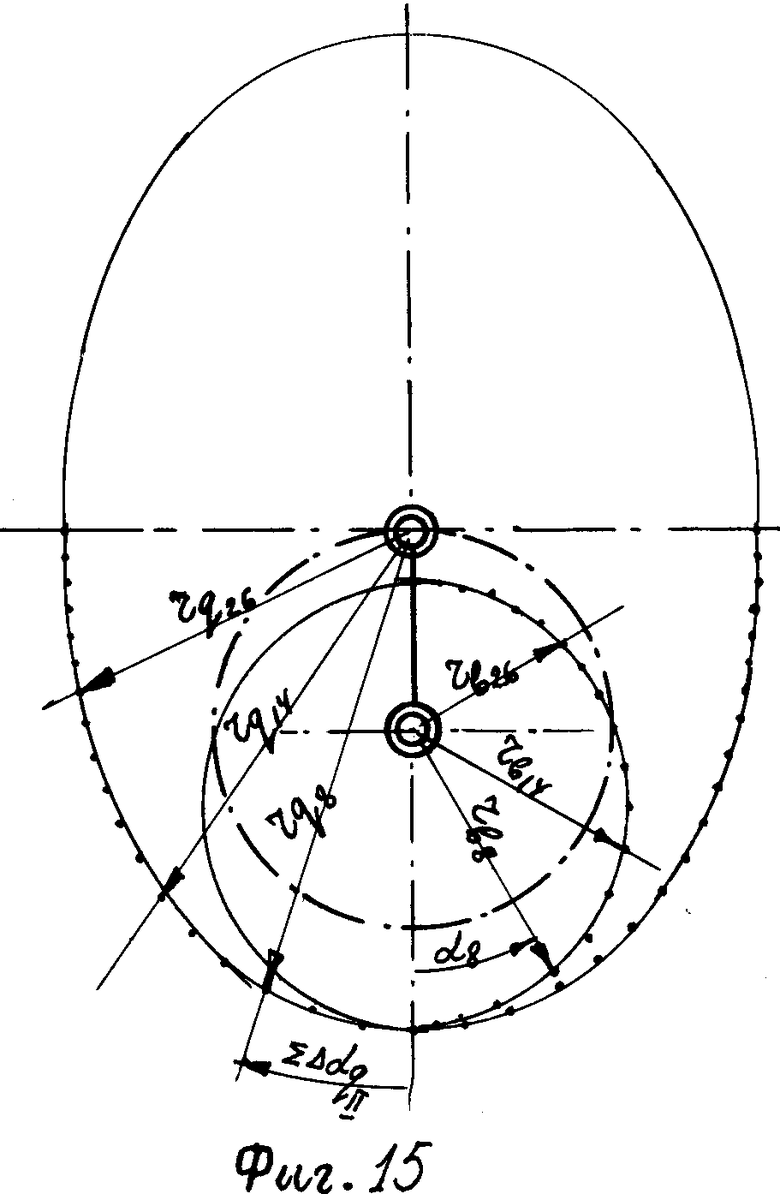
Для кинематической схемы фиг. 3 определим профили зубчатых колес 16 (b) и 15 (q) при их внутреннем зацеплении. Для этого на фиг.17 колесо B с радиусом rb установим неподвижно относительно стойки, а колесо q с rq установим на шарнире Oq водилы H, ось вращения которого расположена в точке OH.
При вращении водила H с угловой скоростью ωн колесо q, обкатываясь, обегает колесо b, вращаясь с угловой скоростью ωq вокруг мгновенного центра вращения P.
Определим связь между угловыми скоростями ωq и ωн.
Для скорости Uoq точки Oq, являющейся общей для колеса q и водила H, с учетом знаков угловых скоростей ωq и ωн имеем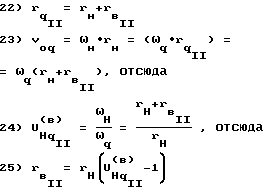
Так как  , то подставим rH в уравнение 24, получим выражение для определения передаточного отношения колес q и b.
, то подставим rH в уравнение 24, получим выражение для определения передаточного отношения колес q и b.
(Данная формула пригодна для определения передаточных отношений в варианте IV).
В выражении 25 присутствует  , который пока отсутствует в таблице.
, который пока отсутствует в таблице.
Для фиг. 17 согласно выражению 16  , тогда
, тогда
где - для варианта II.
- для варианта II.
В уравнении 18 для  /фиг. 3/ для "блока" с четырьмя лучами из таблицы известны Uн7 = (Uαγ)i = Uн,14 и при кратности колес q и b, равном двум
/фиг. 3/ для "блока" с четырьмя лучами из таблицы известны Uн7 = (Uαγ)i = Uн,14 и при кратности колес q и b, равном двум  , будет
, будет 
где
UH7 - на фиг. 1, а UH,14 на фиг. 3.
То есть в этом варианте  .
.
После определения  из выражения 27 может определить
из выражения 27 может определить  . Подставляя
. Подставляя  в выражение 25, можем определить
в выражение 25, можем определить  , предварительно задав произвольное значение rH = 20 мм. Пользуясь выражением 22, определим
, предварительно задав произвольное значение rH = 20 мм. Пользуясь выражением 22, определим  .
.
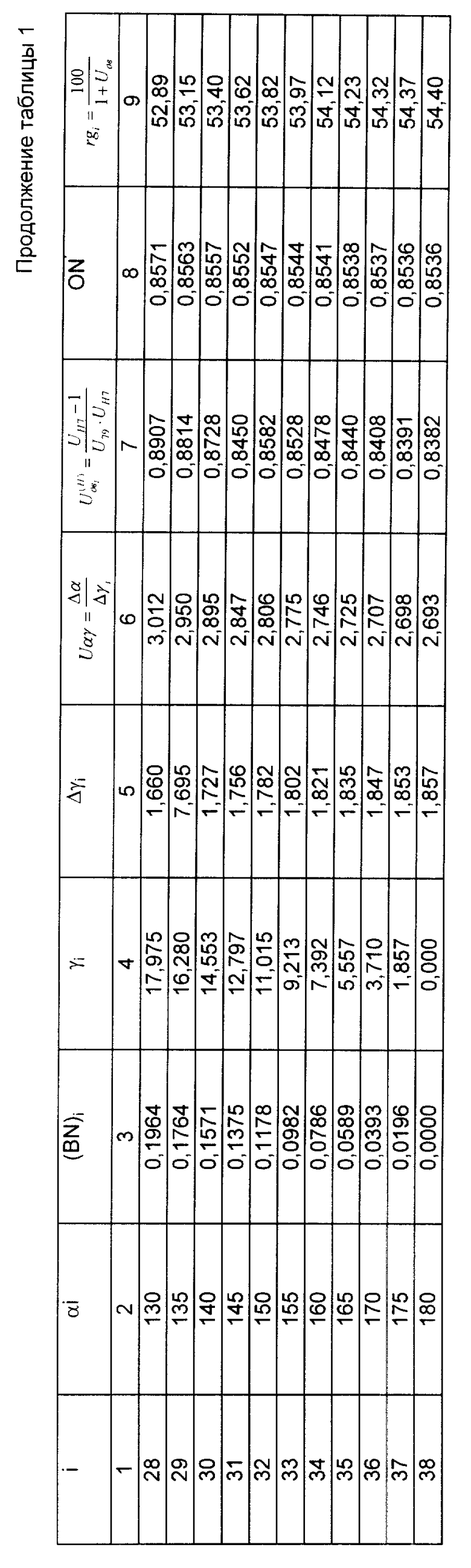
При вращении водила H на αΔн= αΔв= 5° вокруг точки OH положение полюса зацепления P изменяется, двигаясь по профилю колеса b. При этом колеса b и q сопрягаются по начальной окружности на длину дуги, определяемой выражением αΔв•rв , где αΔв= αi-1-αi таблицы.
Обозначим угол поворота колеса  , и из выражения
, и из выражения  определим величину
определим величину  - угла поворота колеса qII. Все полученные значения занесем в таблицу.
- угла поворота колеса qII. Все полученные значения занесем в таблицу.
Далее построим профили колес bII и qII. Для этого из точки Ob проведем радиальные лучи с дискретностью Δαв = 5° и на этих лучах отложим соответствующие величины  , а точки Oq - с дискретностью, равной
, а точки Oq - с дискретностью, равной  , проведем такие же лучи и на них отложим соответствующие длины радиуса
, проведем такие же лучи и на них отложим соответствующие длины радиуса  .
.
Таким методом определены профили колес qII и bII, изображенные на фиг. 15 для кинематической схемы, приведенной на фиг. 3 при количестве радиусов в блоке, равных четырем, и кратности колес q и b, равной двум.
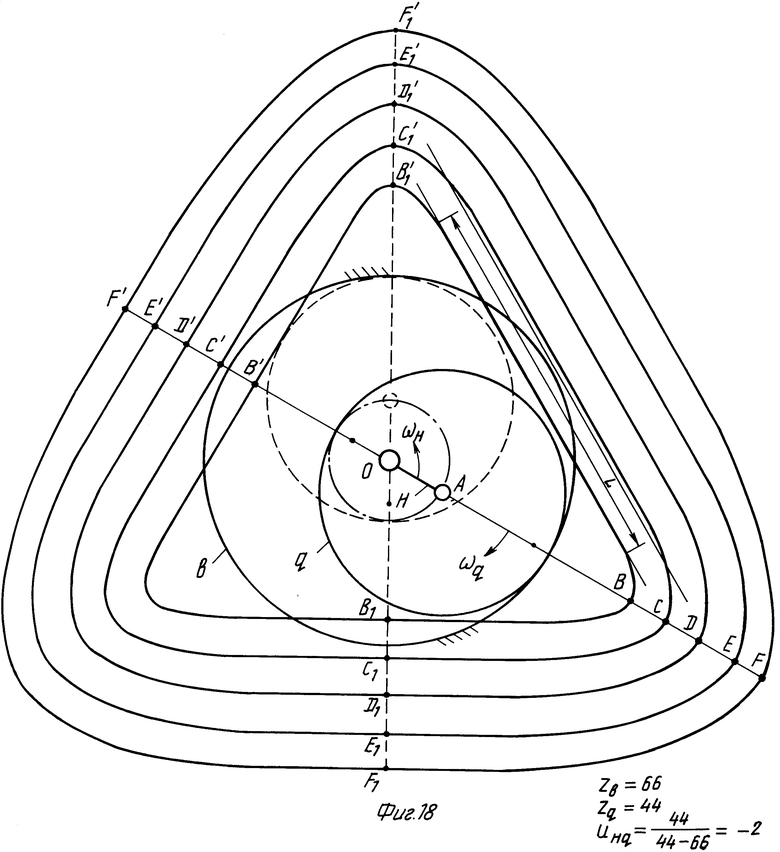
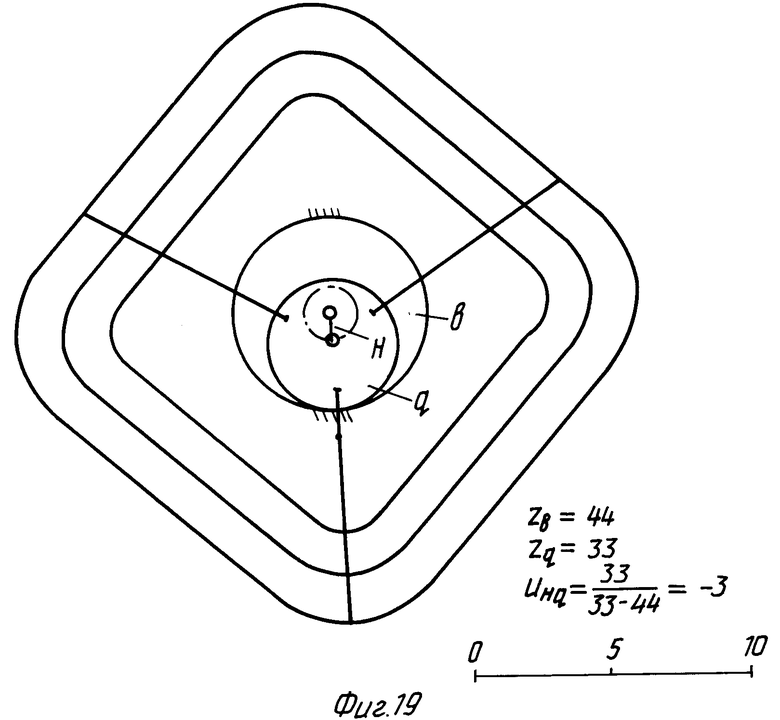
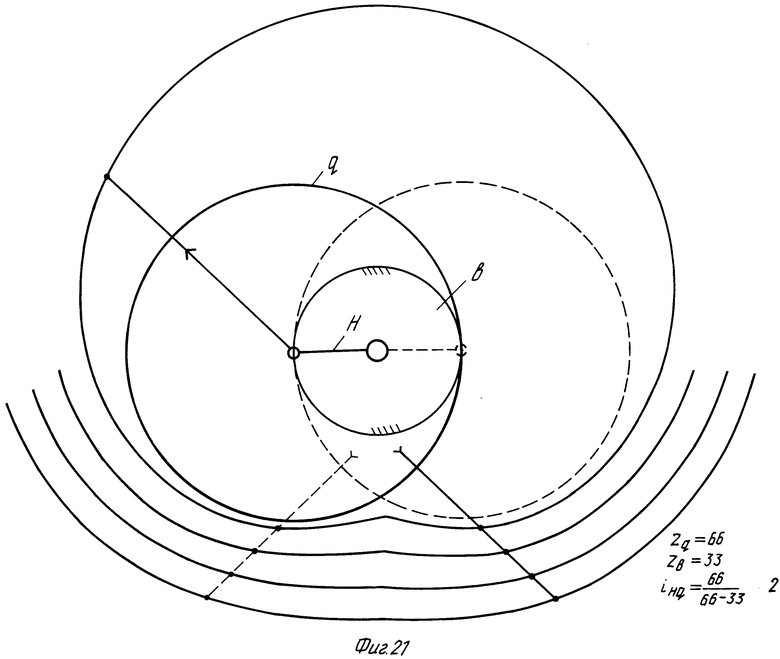
Вариант IV.
В целях подтверждения существования приблизительно прямолинейных участков на траекториях движения выходных элементов кинематической схемы фиг. 5 - 13, на фиг. 18 - 25 изображены кинематические схемы, данные элементов, передаточное отношение (обведено кругом) и траектории движения точек звена, описывающих приблизительно прямолинейные участки.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ (ВАРИАНТЫ) | 1996 |
|
RU2121093C1 |
| МЕХАНИЗМ | 1992 |
|
RU2054593C1 |
| Движитель, шагающий колесными опорами | 2020 |
|
RU2763058C1 |
| Привод транспортного средства | 1988 |
|
SU1768436A1 |
| Шагающее колесо | 2020 |
|
RU2747337C1 |
| Механизм шагающего движителя | 2019 |
|
RU2723923C1 |
| Кулисно-рычажный прямолинейно-направляющий механизм повышенной точности и привод для колесных транспортных средств, приводимых в движение мускульной силой человека | 2017 |
|
RU2664852C1 |
| ИМПУЛЬСНЫЙ ВАРИАТОР | 2016 |
|
RU2620278C2 |
| ПЕДАЛЬНЫЙ ПРИВОД | 2011 |
|
RU2493999C2 |
| ПРЯМОЛИНЕЙНО-НАПРАВЛЯЮЩИЙ МЕХАНИЗМ | 1991 |
|
RU2006725C1 |






Сущность изобретения: механизм содержит стойку, кривошип, на котором поворотно установлены связанные между собой звено и зубчатое колесо, которое входит в зацепление либо с одной из шестерен, установленных на смонтированной в кривошипе оси, при этом другая шестерня связана с неподвижной некруглой шестерней, а передаточное отношение между кривошипом и звеном выбрано равным одному числу из ряда натуральных чисел больше единицы, которое в цикле поворота кривошипа переменное. Кроме того, зубчатое колесо может быть связано с неподвижным зубчатым колесом с внутрен-ним зацеплением, при этом передаточное отношение между кривошипом и звеном выбрано равным одному числу из ряда чисел - 2, 2, - 3,3,- 4, 4 и т.д., которое в цикле поворота кривошипа постоянное. Указанные выполнения механизма позволяют расширить область его использования. 2 с. и 4 з.п. ф-лы, 1 табл., 27 ил.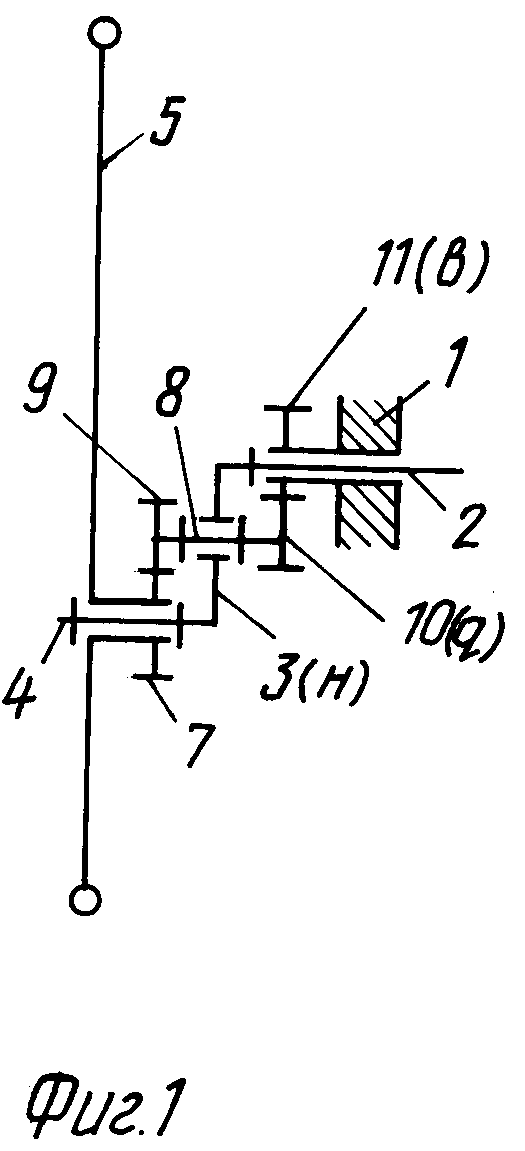
| Артоболевский И.И | |||
| Механизмы в современной технике, т.3 | |||
| - М.: Наука, 1973, с | |||
| Питательное приспособление к трепальным машинам для лубовых растений | 1922 |
|
SU201A1 |

