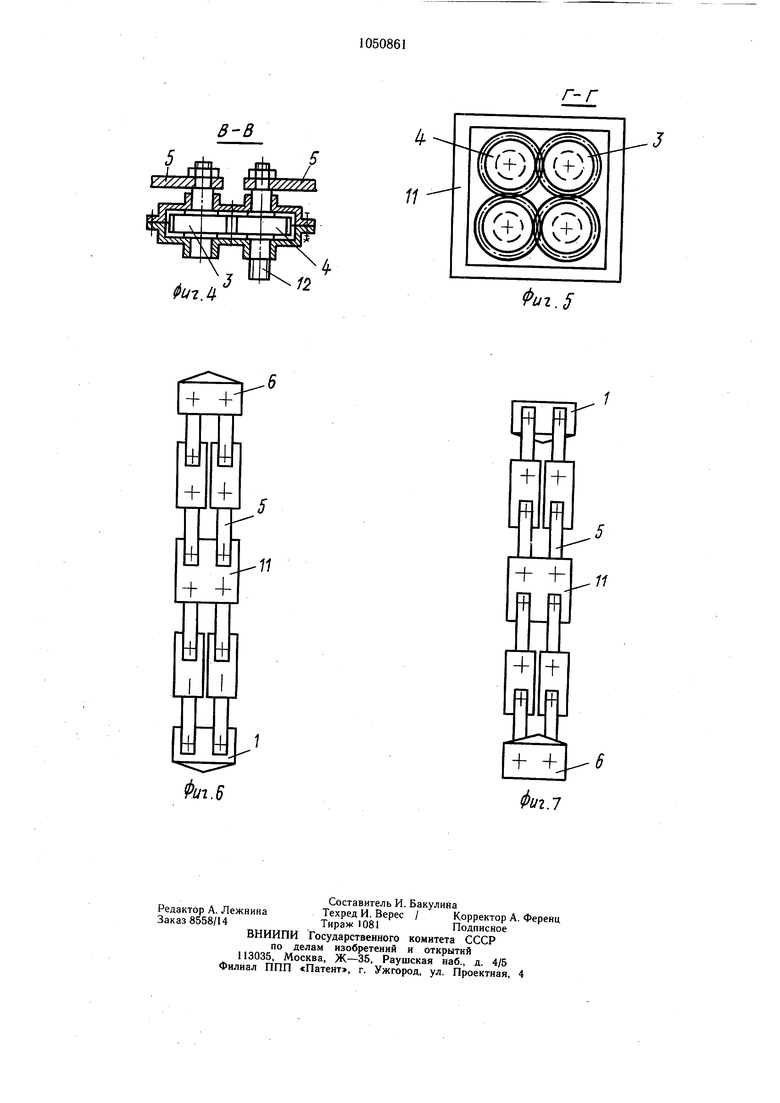
Изобретение относится к машиностроению, а именно к манипуляторам для механизации технологических процессов, содержащих подъемно-транспортные и другие операции. Известен манипулятор, содержащий многозвенный исполнительный орган, звенья которого шарнирно сочленены и кинематически связаны между собой, первое из которых связано с основанием и приводом, а последнее - с захватом. Каждое звено содержит корпус, в котором смонтирована механическая (цепная) передача с U 1/2, кроме последнего, где; . Межцентровые расстояния всех звеньев равны между собой Указанный манипулятор позволяет расширить зону обслуживания, однако он .характеризуется сложностью конструкции и недостаточно высокой грузоподъемностью. Известен манипулятор, исполнительный орган которого содержит звенья, включающие элементы, соединенные между собой ОСНОВНЫМИ шарнирами, выполненными в виде пары одинаковых шестерен, установленных в корпусе, при этом входное звено связано с основанием и приводом, а выходное - с захватом 2. Однако известный манипулятор конструктивно сложен, -ак как звенья исполнительного органа содержат механические .передачи, наличие которых снижает его надежность и кинематическую жесткость. , Цель изобретения - повышение надежности и кинематической жесткости. Поставленная цель достигается тем, что исполнительный орган манипулятора; содержащий звенья, включающие элементы, соединенные между собой основными шарнирами, выполненными в виде пары одинаг ковых шестерен, установленных в корпусе, при этом входное звено связано с основанием и приводом, а выходное - с захватом снабжен дополнительными шарнирами, выполненными из четырех аналогичных шестерен, находящихся в зацеплении и образующих замкнутую кинематическую цепь, а звенья выполнены из четырех элементов, соединенных в ромб, при этом соседние звенья связаны между собой дополнительными шарнирами, а пары смежных элементов в каждом звене - основными шарнирами. На фиг. 1 изображен исполнительный орган манипулятора, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - разрез В-В на фиг. 1; на фиг. 5 - разрез Г-Г на фиг. 2; на фиг. б предельное состояние конструкции при выдвижении вверх по фиг. 1; на фиг. 7 - то же, при выдвижении в противоположную сторону. Исполнительный орган манипулятора содержит входное звено, выполненное в виде корпуса 1 с фланцем 2-для скрепления с основанием (не показано). В корпусе 1 смонтирована пара одинаковых шестерен 3 и 4 (фиг. 4), на валы которых жестко установлены элементы 5. Выходное звено имеет аналогичную конструкцию и содержит корпус 6 с фланцем 7 для крепления захвата или другого рабочего органа (не показан). Основные шарниры состоят из корпусов 8, в которых расположены аналогичные шестерни 9 и 10. К валам шестерен 9 и 10 жестко крепятся элементы 5. Дополнительный шарнир содержит корпус 11 (фиг. 1), в котором расположены четыре шестерни: пара шестерен 3 и пара шестерен 4, находящиеся в зацеплении друг с другом. Одна из щестерен 3, расположенных в корпусе 1 входного звена, снабжена валом 12, связанным с приводом (не показан). Смежные элементы (фиг. 1 и 2) подсоединены к шарнирам с противоположных сторон относительно корпусов последних. Такое расположение обеспечивает возможность работы по обе стороны относительно опоры. Исполнительный орган манипулятора работает следующим образом. При повороте вала 12 в направлении, соответствующем вращению шестерни 4 (фиг. 4) корпуса 1 (фиг. 1) против часовой стрелки, поворачивается и жестко связанный с этой шестерней элемент 5. Шестерни 4 и 3 находятся в зацеплении, и передаточное число U 1, поэтому с той же скоростью будет поворачиваться, но в противоположную сторону и смежный элемент 5. В корпусе 8 основного шарнира,с которым связаны элементы 5, расположена пара аналогичных шестерен 9 и 10. Это обеспечивает поворот ,,-€вязанных с последними смежных элементов 5 также в противоположные стороны. Дополнительный шарнир содержит четыре шестерни с передаточным отношением U 1, поэтому обеспечивается поворот смежных четырех элементов 5 также в противоположные стороны. При этом весь механизм перемещается в сторону выдвижения (фиг. 1, вверх), а крайнее вытянутое положение показано на фиг. 6. Вращение вала 12 в противоположную сторону приводит к повороту элементов 5 также в противоположном направлении, и вся конструкция начинает складываться, а затем вновь раздвигаться, но уже вниз (фиг. 1), предельное положение показано на фиг. 7. Таким образом, связь звеньев при помощи дополнительного шарнира, выполненного в виде четырех аналогичных шестерен, позволяет повысить надежность и кинематическую жесткость исполнительного органа манипулятора.
//ч m
/2
лт
Фиг.г
ВидА
5 .
V
Ч
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1978 |
|
SU763080A2 |
| Исполнительное устройство манипулятора | 1986 |
|
SU1414620A1 |
| Манипулятор внутрикамерный | 2021 |
|
RU2785920C1 |
| Исполнительный орган манипулятора | 1979 |
|
SU874331A2 |
| Манипулятор | 1979 |
|
SU770780A1 |
| Исполнительный орган манипулятора | 1987 |
|
SU1426777A1 |
| Податливый дифференциальный шарнир манипулятора с силомоментным очувствлением | 2021 |
|
RU2803718C2 |
| Исполнительный орган манипулятора | 1982 |
|
SU1033306A1 |
| Манипулятор | 1976 |
|
SU653103A1 |
| Манипулятор | 1984 |
|
SU1273243A1 |

ИСПОЛНИТЕЛЬНЫЙ ОРГАН МАНИГ1УЛЯТОРА, содержащий звенья, включающие элементы, соединенные между собой основными щарнирами, выполненными в виде пары одинаковых щ стерен, установленных в корпусе, при этом входное звено связано с основанием и приводом, а выходное - с захватом, отличающийся тем, что, с целью повыщения надежности и кинематической жесткости, он снабжен дополнительными щарнирами, выполненными из четырех аналогичных щестерен, находящихся в зацеплении и образующих замкнутую кинематическую цепь, а звенья выполнены из четырех элементов, соединенных в ромб, при этом соседние звенья связаны между собой дополнительными -щарнирами, а пары смежных элементов в каждом звене - основными щарнирами. (Л ел о 00 о
S-6
Фиг.З
ВВ
Фиг. 5
-f +
+
4 J
4Фиг.1
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Машина для добычи торфа гидравлическим способом | 1943 |
|
SU65937A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Манипулятор | 1978 |
|
SU763080A2 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
