4; ;0
00 СП
Изобретение относится к машино- строению5 а именно к шарнирно-ры- чажным преобразователям вращательного движения в шаговое поступа- . тельное, и найдет применение, в частности, при строительстве конвейерных линий.
Цель изобретения - уменьшение габаритов механизма за счет замены ю эксцентриковых узлов механизма ко- ромыслово-ползунным и повышение его производительности за счет повышения скорости рабочего хода ведомого звена.15
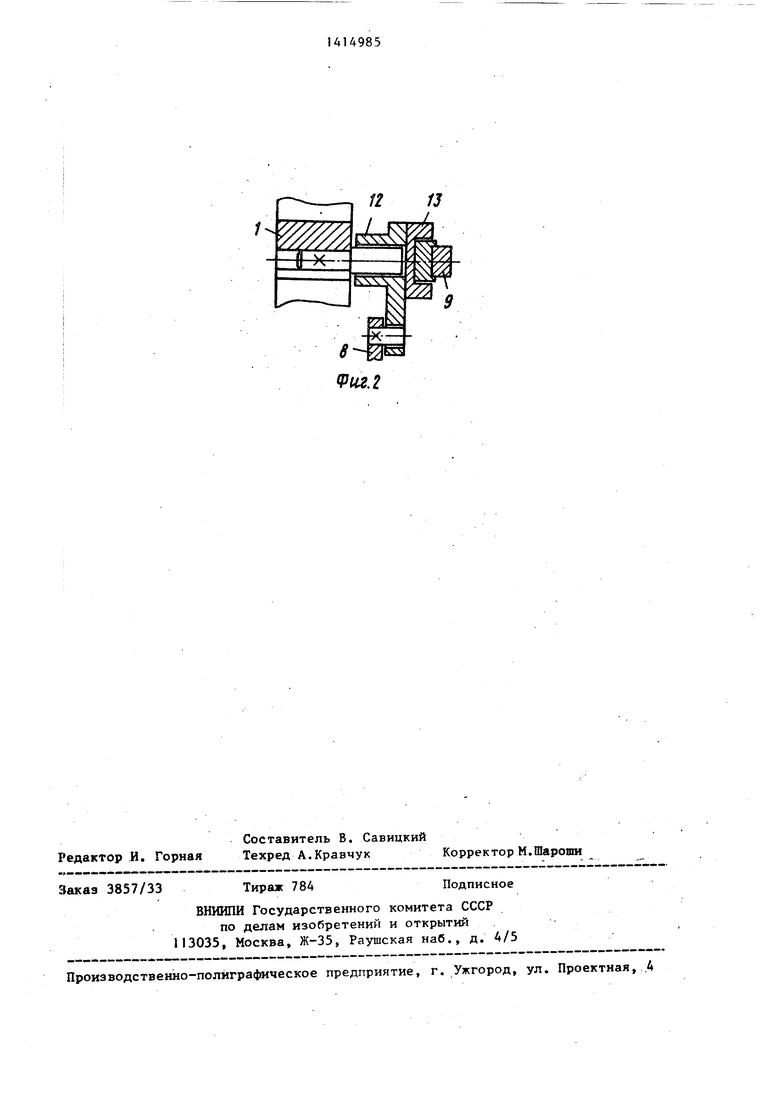
На фиг. 1 показана кинематичест кая схема предлагаемого механизма; на фиг„ 2 соединение коромысел с основанием и шатунами.
Механизм содержит основание 1, 20 установленный на нем кривошип 2, поступательно движущееся звено 3 с цевками 4, перемещакндееся, например, в направляющих 5 по роликам 6, и шар нирно-рычажный параллелограмм, вклю- 25 чающий две пары параллельных между собой шатунов 7,8 и 9,10. На шатуне 7 установлен поводок 11, предназначенный для периодического взаимодействия с цевками 4. На основании 1 Q установлены также два коромысла 12 с выполненными в них прямолинейными направляющими 13. Шатун 8 первой пары шарнирно связывает коромысла
12ме:1вду собой, а шатуны 9 и 10 второй пары установлены в направляющих
13коромысел 12 с возможностью возвратно-поступательного перемещения.
Механизм работает следуктим образом,40
При вращении кривошипа 2 его вращательное движение преобразуется в качательное движение коромысла 12, плоскопараллельное движение шатунов
7и В и сложное движение шатунов 9 45 и 10, состоящее из возвратно-поступательных перемещений ия по направляющим 13 коромысел 12 и качательных движений вокруг осей шарниров, свя- зьшающих коромысла 12 с основанием 150
8результате поводок I1, закрепленный
35
на шатуне 7, описывает замкнутую кривую А, периодически взаимодействуя при этом с цевками 4 ведомого звена 3. За один оборот кривошипа 2 ведомое звено 3 перемещается на шаг t. В начале рабочего хода поводок 11 входит в зацепление с цевками 4, и в период поворота кривошипа 2 на угол в( переметает звено 3 на шаг t.. В конце рабочего хода поводок 11 выходит из зацепления с цевками 4, и в период поворота кривошипа 2 на yronjb совершает холостой ход. Ведомое звено 3 в это время имеет выс той и фиксируется.от случайных перемещений, например, шариковым фиксатором. Поскольку угол « поворота кривошипа значительно меньше угла Ji , ведомое звено 3 имеет большую скорость перемещения на шаг t при увеличенном времени выстоя за один рабочий цикл.
Формула изобретения
Шарнирно-рычажный механизм шаговых, перемещений, содержащий основание, установленный на нем кривошип, ведомое звено, установленное с возможностью поступательного перемещения, с цевками, щарнирно-рычажиый параллелограмм, состоящий из двух пар параллельных шатунов, и поводок, закрепленный на одном из шатунов первой пары и предназначенный для периодического взаимодействия с цевками, а один из шатунов второй пары шарнирно связан с кривошипом, о т л и ч а ю щ и и с я тем, что, с целью уменьшения габаритов и повышения производительности, механизм снабжен двумя установленными на основании коромыслами с вьшолненными в них прямолинейными направляющими, шатуны второй пары установлены в этих направляющих с возможностью возвратно- поступательного перемещения, а второй шатун первой пары шарнирно связан с коромыслами.
(PiL.I
12 13
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм шагового перемещения (его варианты) | 1983 |
|
SU1114834A1 |
| Механизм шагового поворота | 1985 |
|
SU1263945A1 |
| Механизм шагового поворота | 1984 |
|
SU1260616A1 |
| Станок для фасонного строгания | 1982 |
|
SU1077720A1 |
| РЕГУЛИРУЕМОЕ УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В КОЛЕБАТЕЛЬНОЕ | 2005 |
|
RU2307271C1 |
| Кулачково-зубчато-рычажный механизм | 1987 |
|
SU1567825A1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМИ ОСТАНОВКАМИ | 2005 |
|
RU2283446C1 |
| СПОСОБ И УСТРОЙСТВО РЕГУЛИРОВАНИЯ УГЛА ВЫСТОЯ ЗУБЧАТО-РЫЧАЖНОГО МЕХАНИЗМА | 2005 |
|
RU2285168C1 |
| Механизм шагового поворота | 1982 |
|
SU1075040A1 |
| МЕХАНИЗМ ПРИВОДА ПУАНСОНА УЛЬТРАЗВУКОВОЙ ШВЕЙНОЙ МАШИНЫ | 2024 |
|
RU2829826C1 |
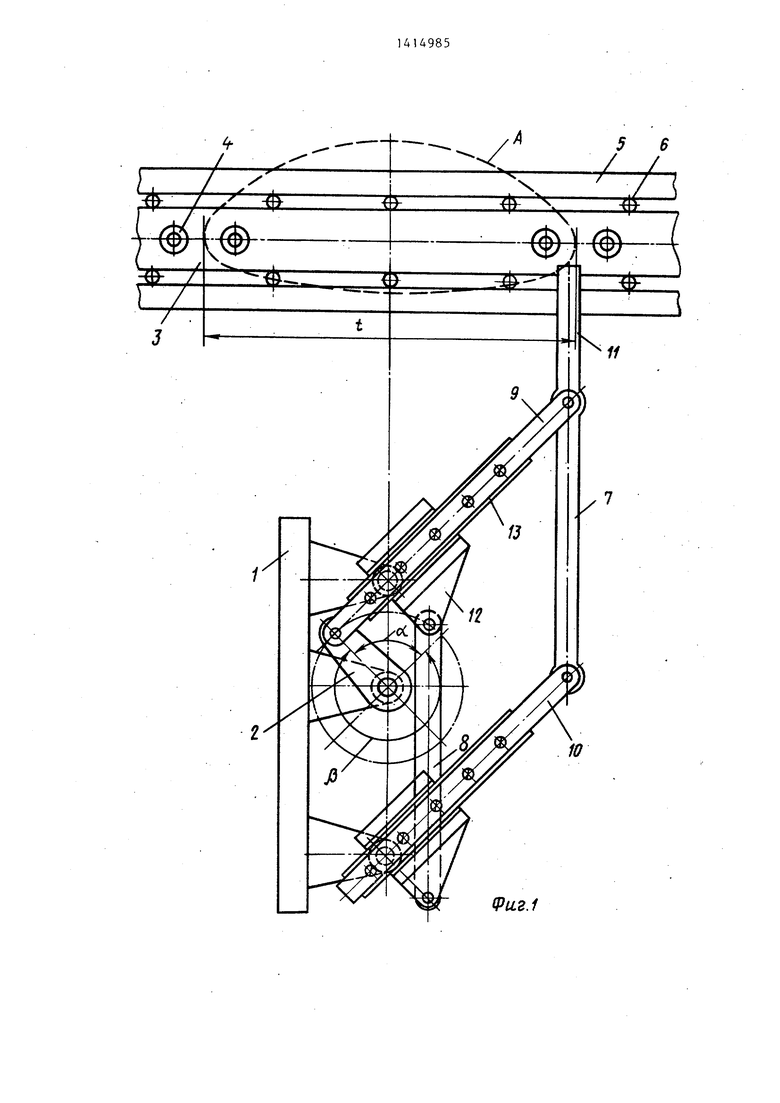
Изобретение относится к шарнир- но-рычажным преобразователям враша тельного движения в шаговое поступательное. Цель изобретения - повышение производительности механизма и сокращение его габаритов. Вращательное движение кривошипа за счет наличия шарнирно-рычажного параллелограмма преобразуется в перемещение поводка; по шатунной кривой А. При повороте кривошипа на угол поводок 1I входит в зацепление с цевкам ведомого звена и перемещает его на шаг t. При повороте кривошипа на уголУ поводок выходит из зацепления с.цевками и совершает холостой ход, а звено имеет выстой. Поскольку угол « значительно больше угла 4/Ь, за один рабочий цикл звено имеет ускоренное перемещение при увеличенном времени выстоя, что . важно, наприм ер, в работе конвейеров. 2 ил.
iPue.2
Составитель В. Савицкий Редактор И. Горная Техред А.Кравчук Корректор М.Шароши
:1ака9 3857/33
Тираж 784
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. А/5
Подписное
| Авторское свидетельство СССР | |||
| Механизм шагового перемещения (его варианты) | 1983 |
|
SU1114834A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
