Изобретение относится к машиностроению, в частности к шарнирным кривошипным механизмам, обеспечивающим надежную передачу вращающего момента и угловой скорости от одного приводного двигателя к нескольким синхронно вращающимся рабочим органам без возникновения от них зоны неуправляемых особых положений с неопределенностью движения выходного звена.
Известен шарнирный кривошипно-коромысловый механизм, содержащий замкнутую кинематическую цепь, включающую стойку, ведущий кривошип, ведомое коромысло и расположенный между ними шатун, выполненный в виде двухшарнирного звена и установленный непараллельно стойке - аналог (книга Коловский М.З. и др. «Теория механизмов и машин» - М: Изд. Центр «Академия», 2006, с. 43, рас. 2.2).
Недостатками известного шарнирного механизма являются:
1. Сложность конструкции, изготовления и сборки звеньев разной длины.
2. Неработоспособность и избыточная (т.е. не зависящая от приводного двигателя) подвижность механизма в возникающем одном особом (крайнем) положении, что приводит к его неуправляемости и поэтому ограничивает рабочую зону вращения ведущего кривошипа.
Наиболее близким по технической сущности и достигаемому эффекту к предлагаемому изобретению является шарнирный кривошипный механизм, содержащий замкнутую кинематическую цепь, включающую стойку, ведущий и ведомый кривошип и расположенный между ними шатун, выполненный в виде двухшарнирного линейного звена, установленного параллельно и равного по длине стойке - прототип (Крайнев А.Ф. «Механика машин. Фундаментальный словарь» - М.: Машиностроение, 2000. С. 159., схема механизма на рис. б)).
Недостатками указанного шарнирного кривошипного механизма являются:
1. Наличие в механизме (через каждые 180° поворота ведущего кривошипа, когда все шарниры звеньев располагаются на одной прямой) двух особых мертвых положений, в которых из-за разрыва связей в кинематической паре возникает зона неуправляемого движения ведомого вала.
2. На практике эксплуатация и в теории установлено, что в этих особых положениях происходит самопроизвольный неуправляемый переход из сборки параллелограмма в сборку антипараллелограмма, при котором 2 раза за каждый цикл поворота на 360° происходит резкое изменение направления вращения ведомого вала с его жесткими ударами, т.е. механизм в этих мертвых положениях вообще неработоспособен (и по авт. свид. № 877176, Бюл. №40, СССР, 1981 г. - требует дополнительного сложного зубчатого привода кривошипов для выхода из мертвых положений путем ударного реверса выходного вала).
В основу изобретения положена техническая задача, заключающаяся в создании работоспособного шарнирного кривошипного механизма без вредных особых положений - во всем возможном полном рабочем угле поворота ведущего кривошипа на 360° и сохранении при этом постоянного заданного направления вращения ведомого вала.
Получение технического результата достигается за счет того, что замкнутая кинематическая цепь предлагаемого шарнирного кривошипного механизма выполнена в виде многоконтурного шарнирного параллелограмма, в котором каждый отдельный шатун выполнен в виде трехшарнирного звена, например в виде равностороннего треугольника, кинематически связанного со стойкой посредством двухшарнирных кривошипов, выполненных одинаковой длины и параллельно установленных между собой в одном направлении при сборке кинематической цепи с образованием связанных между собой через шатун параллелограммных замкнутых контуров.
Сущность изобретения поясняется чертежами на фиг. 1, фиг. 2, фиг. 3, фиг. 4, фиг. 5 и фиг. 6.
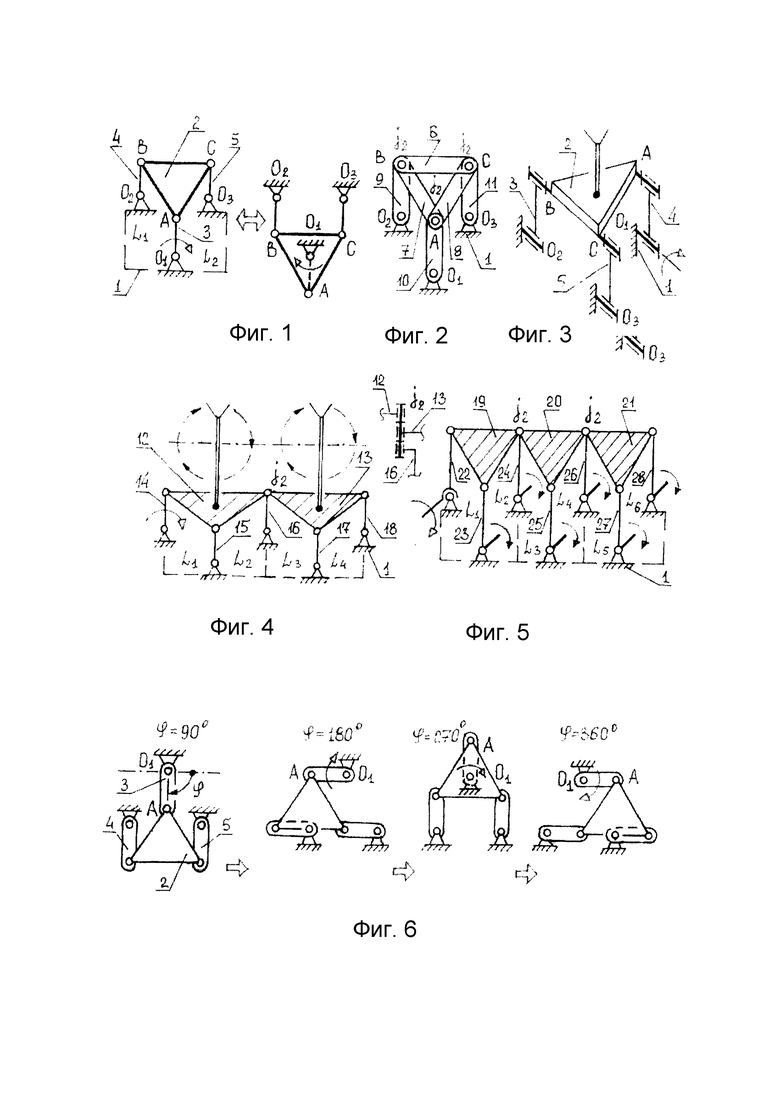
На фиг. 1 изображен общий вид шарнирного кривошипного механизма, содержащего стойку 1 с опорными шарнирами O1, O2, O3 и замкнутую кинематическую цепь, которая выполнена в виде многоконтурного шарнирного параллелограмма, в котором шатун 2 выполнен в виде трехшарнирного звена, например, в виде треугольника ABC (равностороннего, прямоугольного или косоугольного), кинематически связанного со стойкой 1 посредством двухшарнирных кривошипов 3, 4 и 5 одинаковой длины, параллельно установленных между собой в одном направлении при сборке кинематической цепи с образованием в ней связанных между собой через шатун 2 параллелограммных замкнутых контуров L1, L2.
На фиг. 2 представлен вариант выполнения многоконтурного шарнирного параллелограмма из шести двухшарнирных звеньев одинаковой длины, три из которых 6, 7 и 8 при сборке из них шатуна образуют равносторонний треугольник АБС, а другие три двухшарнирных звена 9, 10 и 11 параллельно установлены между шатуном и стойкой и соединены с шатуном двойными шарнирами (обозначены «j2»).
На фиг. 3 представлен вариант выполнения пространственной схемы многоконтурного шарнирного параллелограмма с расположением осей углового поворота всех шарниров отдельных шатунов, кривошипов и стойки при сборке замкнутой кинематической цепи О1, О2, О3, А, В, С параллельно друг другу соответственно в горизонтальной плоскости шатуна 2 и в горизонтальной плоскости стойки 1.
На фиг. 4 представлен вариант выполнения многоконтурного шарнирного параллелограмма из набора последовательно установленных и соединенных между собой через двойной шарнир «j2» двух отдельных трехшарнирных шатунов 12 и 13, соединенных со стойкой 1 пятью параллельными кривошипами одинаковой длины 14, 15, 16, 17 и 18, образующих в этой кинематической цепи связанные между собой через шатуны 12 и 13 параллелограммные замкнутые контуры L1, L2, L3, L4. Трехшарнирные шатуны 12 и 13 могут быть соединены с отдельными рабочими органами, совершающими синхронное движение по окружности с центром внутри объема обрабатываемого изделия.
На фиг. 5 представлен вариант выполнения многоконтурного шарнирного параллелограмма в виде набора последовательно установленных и соединенных между собой посредство двойных шарниров «j2» отдельных трехшарнирных шатунов 19, 20 и 21, шарнирно соединенных со стойкой 1 посредством механизма параллельных кривошипов 22, 23, 24, 25, 26, 27 и 28 с расположением на стойке 1 осей соседних кривошипов в шахматном порядке, образующих в этой кинематической цепи связанные между собой через шатуны 19, 20 и 21 параллелограммные замкнутые контуры L1, L2, L3, L4, L5 и L6.
На фиг. 6 представлена изготовленная и испытанная автором действующая модель предлагаемого механизма на основе многоконтурного параллелограмма с трехшарнирным (треугольным) шатуном 2. Испытания изготовленной модели механизма подтверждают его надежную работоспособность при полном повороте ведущего кривошипа за повторяющийся цикл на угол ϕ=0-360°, в пределах которого в цикле отсутствуют особые неуправляемые положения и самопроизвольный переход из параллелограмма в антипараллелограмм и обратно (что и обеспечивает безударную и бесшумную работу механизма в течение полного цикла).
Работа представленного шарнирного кривошипного механизма заключается в следующем.
Заданное вращение ведущего кривошипа 3 (фиг. 1) через трехшарнирный треугольный шатун 2 преобразуется во вращение ведомых кривошипов 4 и 5 с такой же постоянной угловой скоростью. Выполняемая в предлагаемом механизме передача усилий и моментов с ведущего кривошипа 3 на два ведомых кривошипа 4 и 5 происходит через три шарнира А, В и С, расположенные с разных сторон треугольного шатуна 2, что и обеспечивает постоянный (без разрыва связей) контакт всех кинематических пар, т.е. постоянство вращающего момента на ведомых кривошипах 4 и 5 в течении полного цикла поворота ведущего кривошипа 3 на 360°. Указанное постоянство контакта всех кинематических пар в механизме с трехшарнирным (треугольным) шатуном 2 в свою очередь, и обеспечивает полную управляемость механизма от одного приводного двигателя в течение всего цикла поворота ведущего звена 3, что автоматически исключает вредные особые положения с самопроизвольным превращением параллелограмма в антипараллелограмм (и наоборот с ударами звеньев). Таким образом, предлагаемый шарнирный механизм остается работоспособным кривошипным параллелограммым устройством в пределах всего цикла поворота на 360°, что полностью подтверждается на его действующей модели.
Достигаемый в предлагаемом шарнирном кривошипном механизме положительный эффект заключается в следующем:
1. Передача вращения с ведущего кривошипа на ведомые кривошипы (с такой же постоянной угловой скоростью) через трехшарнирный (треугольный) шатун с шарнирами на его вершинах обеспечивает полную рабочую зону поворота ведущего кривошипа на 360° без возникновения в цикле особых неуправляемых положений шарнирного кривошипного механизма.
2. Исключается самопроизвольный переход в крайних положениях параллелограмма в антипараллелограмм (что исключает возможность вращения выходного вала в другую сторону при заданном направлении вращения приводного двигателя и тем самым исключает жесткие динамические удары при случайном противовращении звеньев).
3. Обеспечивается надежная работоспособность, бесшумность, безударность и полный возможный диапазон работы многокривошипного параллелограммного механизма в пределах всего управляемого одним двигателем углового поворота ведущего кривошипа в цикле на 360°.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОСТРАНСТВЕННЫЙ ПАРАЛЛЕЛОГРАММНЫЙ МЕХАНИЗМ МАНИПУЛЯТОРА | 2022 |
|
RU2784764C1 |
| МНОГОКОНТУРНЫЙ ШАРНИРНЫЙ МЕХАНИЗМ | 2020 |
|
RU2751777C1 |
| СИММЕТРИЧНЫЙ ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2021 |
|
RU2776578C1 |
| ПАРАЛЛЕЛОГРАММНЫЙ ПРЯМОЛИНЕЙНО-НАПРАВЛЯЮЩИЙ МЕХАНИЗМ | 2021 |
|
RU2769002C1 |
| МЕХАНИЗМ ПЛАВАЮЩЕГО ШАРНИРНОГО ПАРАЛЛЕЛОГРАММА | 2021 |
|
RU2765387C1 |
| ШАРНИРНЫЙ МЕХАНИЗМ | 2021 |
|
RU2753064C1 |
| ШАРНИРНЫЙ ВИБРОУДАРНЫЙ МЕХАНИЗМ | 2022 |
|
RU2783900C1 |
| СКЛАДЫВАЮЩИЙСЯ ГРУЗОПОДЪЕМНЫЙ МАНИПУЛЯТОР ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ | 2021 |
|
RU2780824C1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ ИЗМЕНЯЕМОЙ СТРУКТУРЫ | 2020 |
|
RU2750997C1 |
| РЫЧАЖНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМ ДЛИТЕЛЬНЫМ ВЫСТОЕМ | 2023 |
|
RU2836248C1 |
Изобретение относится к машиностроению. Шарнирный кривошипный механизм содержит замкнутую кинематическую цепь, включающую стойку, шатун и расположенные между ними поворотные рычажные звенья. Замкнутая кинематическая цепь выполнена в виде многоконтурного шарнирного параллелограмма, в котором каждый отдельный шатун выполнен в виде трехшарнирного звена, например в виде равностороннего треугольника трехшарнирного шатуна, кинематически связанного со стойкой посредством двухшарнирных кривошипов, выполненных одинаковой длины и параллельно установленных между собой в одном направлении при сборке кинематической цепи с образованием в ней связанных между собой через трехшарнирный шатун параллелограммных замкнутых контуров. Обеспечивается улучшение эксплуатационных характеристик. 4 з.п. ф-лы, 6 ил.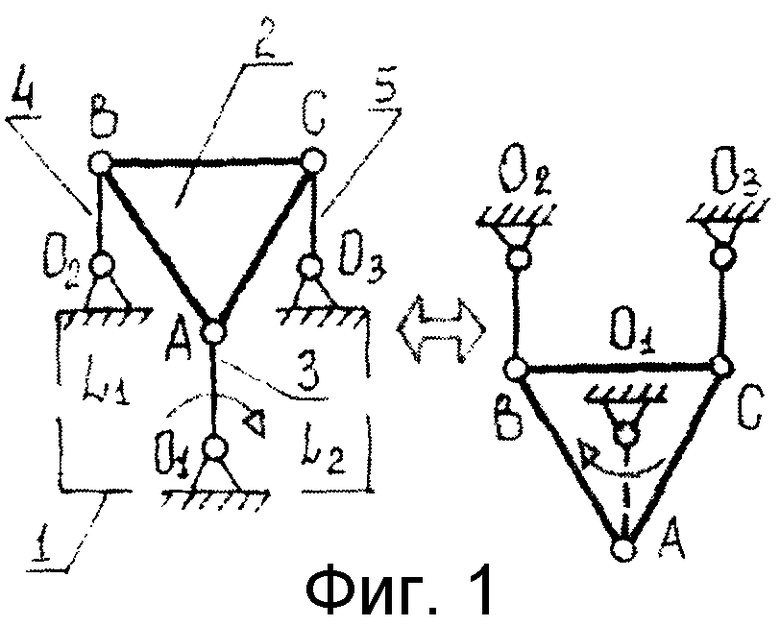
1. Шарнирный кривошипный механизм, содержащий замкнутую кинематическую цепь, включающую стойку, шатун и расположенные между ними поворотные рычажные звенья, отличающийся тем, что замкнутая кинематическая цепь выполнена в виде многоконтурного шарнирного параллелограмма, в котором каждый отдельный шатун выполнен в виде трехшарнирного звена, например в виде равностороннего треугольника трехшарнирного шатуна, кинематически связанного со стойкой посредством двухшарнирных кривошипов, выполненных одинаковой длины и параллельно установленных между собой в одном направлении при сборке кинематической цепи с образованием в ней связанных между собой через трехшарнирный шатун параллелограммных замкнутых контуров.
2. Шарнирный кривошипный механизм по п. 1, отличающийся тем, что многоконтурный шарнирный параллелограмм составлен из шести двухшарнирных звеньев одинаковой длины, три из которых при сборке из них шатуна образуют равносторонний треугольник, а другие три двухшарнирных звена параллельно установлены в одном направлении между шатуном и стойкой и соединены с шатуном двойными шарнирами.
3. Шарнирный кривошипный механизм по п. 1, отличающийся тем, что оси углового поворота всех шарниров отдельных шатунов, кривошипов и стойки расположены при сборке замкнутой кинематической цепи параллельно друг другу соответственно в горизонтальной плоскости шатуна и в горизонтальной плоскости стойки.
4. Шарнирный кривошипный механизм по п. 1, отличающийся тем, что многоконтурный шарнирный параллелограмм составлен из набора последовательно установленных и соединенных между собой через двойной шарнир отдельных трехшарнирных шатунов, например в виде сборки из двух трехшарнирных шатунов, соединенных со стойкой пятью параллельными кривошипами одинаковой длины, в которой трехшарнирные шатуны могут быть соединены с отдельными рабочими органами, совершающими синхронное вращательное движение по окружности с центром внутри объема обрабатываемого изделия.
5. Шарнирный кривошипный механизм по п. 1, отличающийся тем, что многоконтурный шарнирный параллелограмм выполнен в виде набора последовательно установленных и соединенных между собой посредством двойных шарниров отдельных трехшарнирных шатунов, шарнирно соединенных со стойкой посредством механизма параллельных кривошипов с расположением на стойке осей соседних кривошипов в шахматном порядке.
| Механизм тройного шарнирного параллелограмма | 1978 |
|
SU763633A1 |
| Шарнирно-рычажный механизм | 1978 |
|
SU926404A1 |
| Устройство для вывода шарнирного четырехзвенника из мертвого положения | 1980 |
|
SU877176A1 |
| DE 4322121 A1, 05.01.1994. | |||

