I
Изобретение относится к следящим сис темам с бесконтактными двигателями постоянного тока и может быть использовано для улучшения динамических характеристик и упрощения следящих систем.
Известна следящая система, в которой для повышения точности отключают от контура системы выход нереверсивного тахогенератора, укрепленного на входном валу, на тех интервалах времени, когда скорость отработки выходного вала превышает скорость заводки |1).
Недостаток известного устройства - сложность, так как для осуществления необходимого управления требуется дополнительный тахогенератор на выходном валу системы.
Наиболее близким техническим решением Я1вляется бесконтактная следящая система постоянного тока 2, содержащая блок умножения, рднополупериодный выпрямитель, первое и второе реле и последовательно соединенные измеритель рассогласования, усилитель, выпрямитель, сумматор, шнротноимпульсный модулятор, бесконтактный двигатель постоянного и редуктор, выход ко торого соединен с первым входом измери
теля рассогласования, второй вход которого связан со входом тахогенератора, а выход усилителя через последовательно соединенные фазоопережающие звено и первое реле подсоединен ко второму входу бесконтактного двигателя постоянного тока.
Недостаток,такой системы состоит в ее малой надежности ввиду ее сложности, так как требуется дополнительный тахоге ератор на выходном валу системы, что увеличивает габариты, вес и стоимость системы.
10 Целью изобретения является повышение надежности системы.
Поставленная цель достигается тем, что в следящей системе содержится блок сравнения, первый и второй входы которого подключены ко входу и выходу фазоопережаю5 щего звена соответственно, а выход через второе реле подключен к одному входу блока умножения, к другому входу которого подключен выход тахогенератора, выход блока умножения через однополупернодный выпряJQ митель подключен к другому входу сумматора.
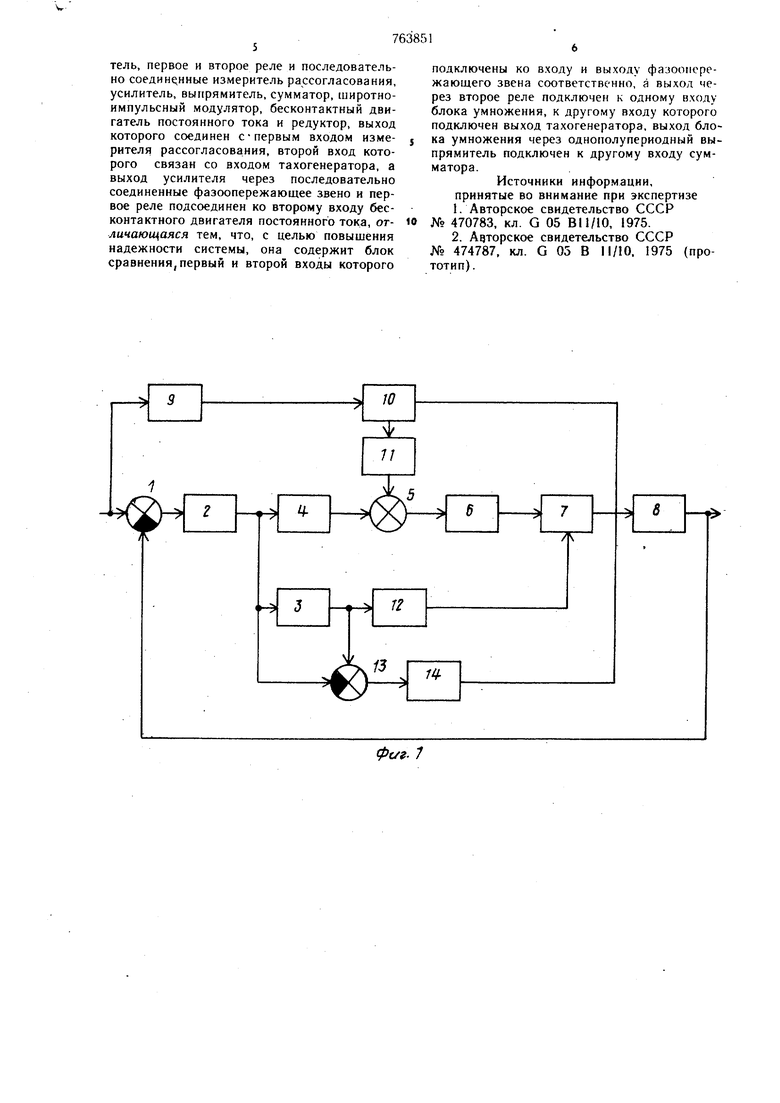
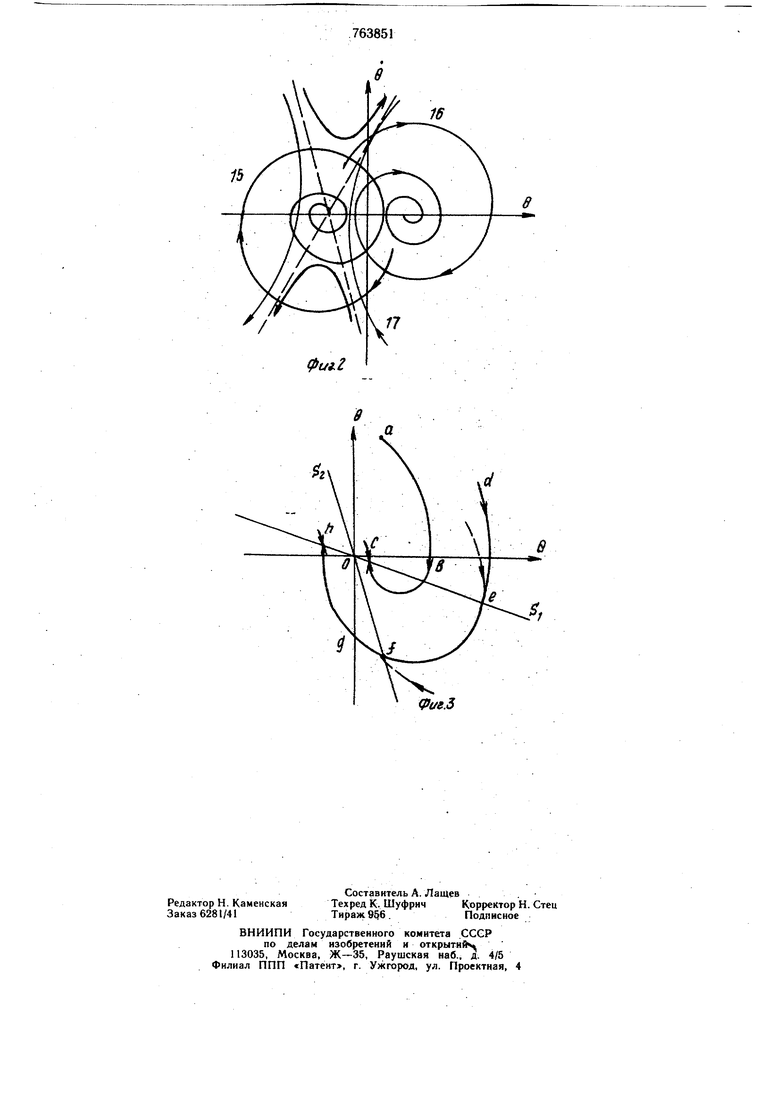
На фиг. I изображена структурная схема предлагаемой системы; на фиг. 2 - характерные фазовые траектории для системы
второго порядка при положительной постоянной скорости заводки; на фиг. 3 траектории движения системы в иерехолном режиме при обработке сигнала с положительной постоянной скоростью заводки.
Следящая система содержит измеритель рассогласования 1, усилитель 2, фазоопережаюшее звено 3, выпрямитель 4, сумматор 5, широтно-импульсный модулятор 6, бесконтактный двигатель постоянного тока 7, редуктор 8, тахогенератор 9, блок умножения 10, однополупериодный выпрямитель II, реле (реверса)12, блок сравнения 13, реле 14.
В описании приняты следующие обозначения:
9-угол рассогласования следящей системы, в - производная угла
рассогласования, ShSi-линии переключения реле 14 и реле реверса 12 (см. фиг. 1),
«а, в, с, о и d, е, f, g, h, о - характерные точки фазовых траекторий. Измеритель рассогласования 1 выявляет разность между входным и выходным углами системы, преобразует ее в напряжение, которое усиливается усилителем 2. Выход усилителя подключен через фазоопережающее звено 3 на вход реле реверса ,12, а через выпрямитель 4 к одному из входов сумматора 5. Кроме того, выход усилителя 2 и выход фазоопережающего звена 3 подключены на входы блока сравнения 13, выход которого подключен к реле 14.
Выход сумматора 5 подключен к широтно-импульсному модулятору б, управляющему бесконтактным двигателем постоянного тока 7, который через редуктор 8 связан с измерителем рассогласования I. Скорость входного вала измеряет тахогенератор 9, выход которого подключен к входу блока умножения 10, на второй вход которого подключен выход реле 14. Выход блока умножения 10 через одиополупериодный выпрямитель 1I подключен ко входу сумматора.
При подаче скачкообразного сигнала система работает следующим образом.
Появивщееся в результате скачка рассогласование усиливается усилителем 2, преобразуется фазоопережающим звеном 3 и переводит в соответствующее положение реле реверса 12, одновременно сигнал с выхода усилителя 2 через выпрямитель 4, сумматор 5 и широтно-импульсный модулятор 6 поступает на двигатель 7. Двигатель 7 вращается в необходимом направлении и отрабатывает рассогласование. При этом сигнал с выхода однополупериодного выпрямителя II равен О, так K;IK )яжение на выходе тахогенератора U рлвно О в течение всего переходного процесса, обусловленного скачкообразным сигналом.
В режиме автоколебательнсж отработки, например линейно-нарастающего сигнала, в системе реализуется такой алгоритм управления, когда напряжение с выхода выпрямителя 4 складывается с выходным напряжением однополупериодиого выпрямителя 11 на тех интервалах времени, где знак напряжения с выхода тахогенератора 9 совпадает с положением реле 14. Подбор параметров фазоопережающего звена 3 обеспечивает такое положение линий переключения реле реверса 12-S г и реле 14-5 (см. фиг. 3), что в системе возникает скользящий режим.
,В переходном, режиме при отработке линейно-нарастающего сигнала следящая система работает следующим, образом.
Движение системы из точки «а (см. фиг. 3) происходит по фазовой траектории 15 (см. фиг. 2), соответствующей работе системы при подключенном инвариантном входе, когда состояние реле ре.верса 12 соответствует знаку сигнала рассогласования. В точке «в происходит отключение инвариантного входа, и движение продолжается по траектории 16 (см. фиг. 2), характеризующей работу системы при отключенном инвариантном входе при соответствии состояния реле 12 знаку сигнала рассогласования, до точки «с.
Дальнейщее движение происходит по линии переключения ОС (см. фиг. 3) в начало координат, так как в системе возникает скользящий режим.
Аналогично происходит движение из точки «d. Однако в точке «f переключается реле реверса 12, и на участке fg дви.жение определяется кривой 17 (см. фиг. 2), соответствующей работе системы при отключенном инвариантном входе при несовпаде НИИ состояния реле реверса 12 и знака сигнала рассогласования.
Заверщающий участок траектории совпадает с линией переключения ho, и движение происходит в скользящем режиме в начало координат.
В установивщемся движении система работает в скользящем режиме, при котором напряжение тахогенератора 9 с бесконечно больщой частотой подключается к сумматору 5.
Экономическая эффективность изобретения определяется тем, что предложенная сис тема имеет один против двух тахогенераторов в системе-прототипе. Это существенно упрощает реализацию системы, уменьщает ее габариты и массу.
Формула изобретения
Следящая система, содержащая блок умножения, однополупериодный выпрямитель, первое и второе реле и последовательно соединс нные измеритель рассогласования, усилитель, выпрямитель, сумматор, широтноимпульсный модулятор, бесконтактный двигатель постоянного тока и редуктор, выход которого соединен с-первым входом измерителя рассогласования, второй вход которого связан со входом тахогенератора, а выход усилителя через последовательно соединенные фазоопережающее звено и первое реле подсоединен ко второму входу бесконтактного двигателя постоянного тока, отличающаяся тем, что, с целью повышения надежности системы, она содержит блок сравнения, первый и второй входы которого
подключены ко входу и выходу фазоопережающего звена соответственно, а выхол через второе реле подключен к одному входу блока умножения, к другому входу которого подключен выход тахогенератора, выход блока умножения через однополупериодный выпрямитель подключен к другому входу сумматора.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 470783, кл. G 05 BI1/10, 1975.
2.Ачторское свидетельство СССР
№ 474787. кл. G 05 В 11/10, 1975 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1979 |
|
SU847275A1 |
| Следящая система | 1979 |
|
SU862114A1 |
| Следящая система | 1979 |
|
SU900255A1 |
| Следящая система | 1979 |
|
SU788076A1 |
| Бесконтактная следящая система постоянного тока | 1973 |
|
SU470783A1 |
| Следящая система | 1986 |
|
SU1472871A1 |
| Следящая система | 1986 |
|
SU1352451A1 |
| Следящая система | 1975 |
|
SU545969A1 |
| Следящая система | 1978 |
|
SU746408A1 |
| Бесконтактная следящая система постоянного тока | 1979 |
|
SU930238A2 |
15
фиг, г
ff
