(54) СЛЕДЯЩАЯ СИСТЕМА
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1978 |
|
SU763851A1 |
| Следящая система | 1979 |
|
SU900255A1 |
| Бесконтактная следящая система постоянного тока | 1973 |
|
SU470783A1 |
| Следящая система | 1979 |
|
SU788076A1 |
| БЕСКОНТАКТНЫЙ СЛЕДЯЩИЙ ПРИВОД ПОСТОЯННОГО ТОКА С КОМБИНИРОВАННЫМ УПРАВЛЕНИЕМ | 1972 |
|
SU435501A1 |
| Следящая система | 1978 |
|
SU746405A1 |
| Следящая система | 1979 |
|
SU847275A1 |
| Бесконтактная следящая система постоянного тока | 1974 |
|
SU525921A1 |
| Следящая система | 1975 |
|
SU608119A1 |
| Следящая система | 1979 |
|
SU862114A1 |
/
1
Изобретение относится к следящим . системам, в которых в качестве исполнительного двигателя используются бесконтактные двигатели постоянного , тока.
Известны следящие системы, содержащие последовательно соединенные изм1еритель рассогласования, усилитель, первый выпрямитель, первый сумматор, . широтно-импульсный модулятор и бесконтактный двигатель постоянного тока с каналом реверса, выход которого через редуктор соединен с одним из входов измерителя рассогласования, и корректирующую цепь, которая состоит 5 из первого и второго тахогенераторов, второго и третьего выпрямителей, сумматора и умножителя 1 и. 2.
Наиболее близка к предлагаемой . 20 следящая система, содержащая задатчик, выход которого через последовательно соединенные тахогенератор и первый выпрямитель соединен с первым входом первого сумматора и через по- 25 следовательно соединенные измеритель рассогласования, усилитель и второй выпрямитель. - со вторым входом первого сумматора и первым входом второго Сумматора, второй вход которого сое-30
динен с выходом первого блока уМ 1Ожения, а выход через широтно-импульсный модулятор - с первым входом исполнительного двигателя, второй вход которого через первое реле подключен к выходу усилителя и непосредственно к первому входу второго блока умножения, а выход через редуктор - ко второму Входу измерителя рассогласования, выход второго реле подключен ко второму входу второго блока умножения ,
Недостатком известной системы является ее низкая точность при малых скоростях входного сигнала, когда амплитуда автоколебательных пульсаций скорости двигателя превышает ее. средние значения и реле в системе совершают дополнительные, нежелательные переключения.
Цель изобретения - повышение точности операций системы.
Поставленная цель Достигается тем, что в системе входы первого блока умножения ,подклю 1ены соответственно к выходам первого сумматора и второго блока умножения, а выход тахогенёратора подключен ко входу второго реле.
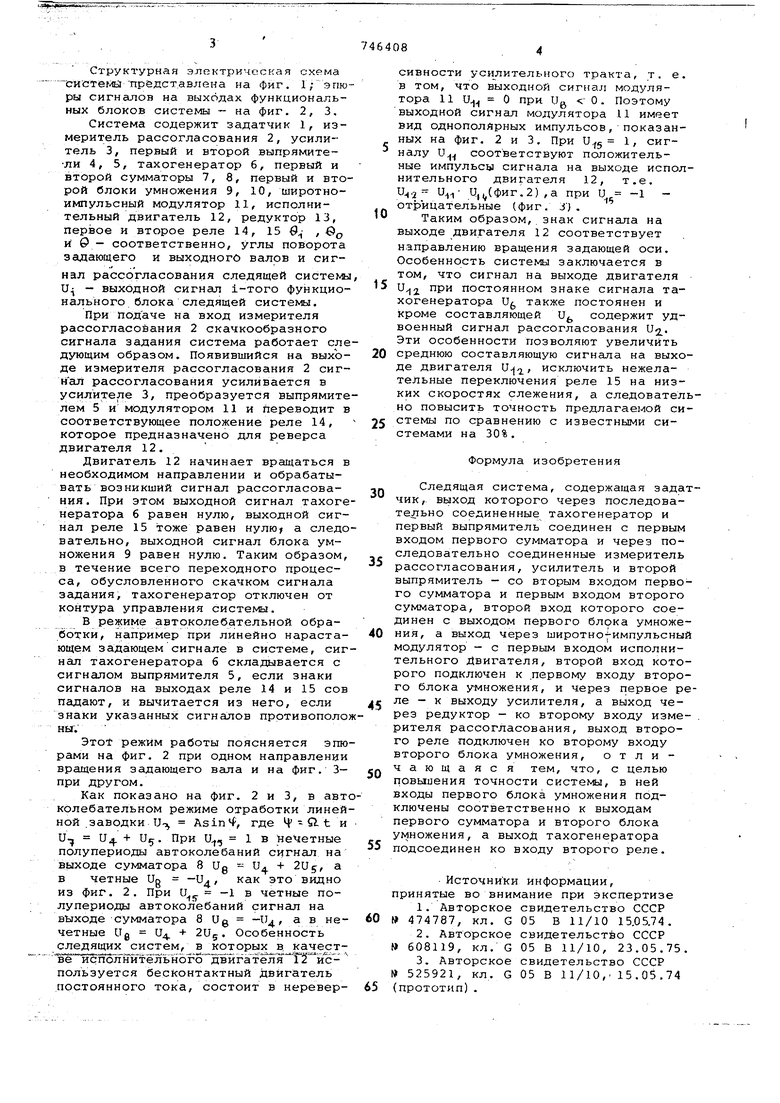
Структурная электрическая схема cиcтe представлена на Фиг. 1; эпюры сигнсшов на выходах функциональных блоков системы на фиг. 2, 3.
Система содержит задатчик 1, измеритель рассогласования 2, усилитель 3, первый и второй выпрямители 4, 5, тахогенератор 6, первый и второй сумматоры 7, 8, первый и второй блоки умножения 9, 10, широтноимпульсный модулятор 11, исполнительный двигатель 12, редуктор 13, первое и второе реле 14, 15 & , 0, Ч Q - соответственно, углы поворота задающего и выходного валов и сигнал рассогласования следящей система и - выходной сигнал i-того функционального блока следящей системы,
При подаче на вход измерителя рассогласойания 2 скачкообразного сигнала задания система работает следующим образом. Появившийся на выходе измерителя рассогласования 2 сигнал рассогласования усиливается в усилителе 3, преобразуется выпрямителем 5 и модулятором 11 и переводит в соответствующее положение реле 14, которое предназначено для реверса двигателя 12,
Двигатель 12 начинает вращаться в необходимом направлении и обрабатывать возникший сигнал рассогласования. При этом выходной сигнал тахогенератора 6 равен нулю, выходной сигнал реле 15 тоже равен нулю а следовательно, выходной сигнал блока умножения 9 равен нулю. Таким образом, в течение всего переходного процесса, обусловленного скачком сигнала задания, тахогенератор отключен от контура управления системы.
В режиме автоколебательной обработки, например при линейно нарастающем задающем сигнале в системе, сигнал тахогенератора 6 складывается с сигналом выпрямителя 5, если знаки сигналов на выходах реле 14 и 15 сов падают, и вычитается из него, если знаки указанных сигналов противополоны.
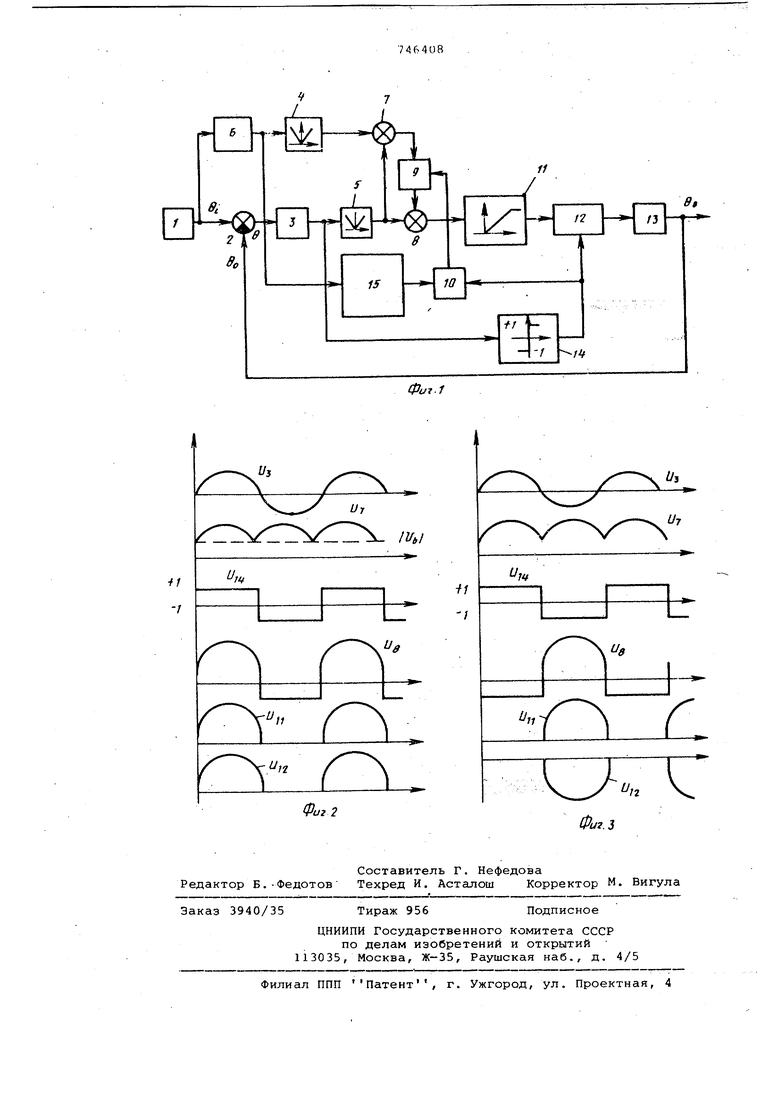
3Tot режим работы поясняется эпюрами на фиг. 2 при одном направлении вращения задающего вала и на фиг. 3- при другом.
Как показано на фиг. 2 и 3, в автколебательном режиме отработки линейной .заводки UT, , где f - О. t и и и + и. При и, 1 в йе гетные полупериоды автоколебаний сигнал на выходе сумматора 8 Ug U + 2U5, а в четные Ug -Од, как это видно из фиг. 2. При . -1 в четные полупериоды автоколебаний сигнал на выходе-сумматора 8 Ug -Пд а в нечетные Ug и. + 2U5. Особенность следящих систем, в которь1Х в каче ст В1е исполнитёл1.н61о Нв11гателя Г2 йспользуется бесконтактный двигатель постоянного тока, состоит в нереверсивности усилительного тракта, т. е. в том, что выходной сигнал модулятора 11 Ц О при Ug 0. Поэтому выходной сигнал модулятора 11 имеет вид однополйрных импульсов, показанных на фиг. 2 и 3. При U.,5 1, сигналу и соответствуют положительные импульсы сигнала на выходе исполнительного двигателя 12, т.е. U.2 - Ц,(фиг.2),а при и -1 отрицательные (фиг. J} ,
Таким образом, знак сигнала на
выходе двигателя 12 соответствует направлению вращения задающей оси. Особенность системы заключается в том, что сигнал на выходе двигателя
, при постоянном знаке сигнала тахогенератора и также постоянен и кроме составляющей U содержит удвоенный сигнал рассогласования и.. Эти особенности позволяют увеличить
среднюю составляющую сигнала на выходе двигателя U, исключить нежелательные переключения реле 15 на низких скоростях слежения, а следовательно повысить точность предлагаемой системы по сравнению с известными системами на 30%.
Формула изобретения Следящая система, содержащая задат.,
чик, выход которого через последовательно соединенные тахогенератор и первый выпрямитель соединен с первым входом первого сумматора и через последовательно соединенные измеритель рассогласования, усилитель и второй выпрямитель - со вторым входом первого сумматора и первым входом второго сумматора, второй вход которого соединен с выходом первого блока умножения, а выход через широтно- -импульсный модулятор - с первым входом исполнительного Двигателя, второй вход которого подключен к первому входу второго блока умножения, и через первое реле - К выходу усилителя, а выход через редуктор - ко второму входу измерителя рассогласования, выход второго реле подключен ко второму входу второго блока умножения, о т л и чающаяся тем, что, с целью повыиения точности системы, в ней входы первого блока умножения подключены соответственно к выходам первого сумматора и второго блока умножения, а выход тахогенератора
подсоединен ко входу второго реле.
Источники информации, принятые во внимание при экспертизе
608119, кл. G 05 В 11/10, 23.05.75.
№ 525921, кл. G 05 В 11/10,15.05.74 (прототип).
