t
Изобретение относится к механическим испытаниям, а именно к захватам для крепления гибких образцов а разрывной машине.
Известен зажим к разрывным маши- 5 нам, содержащий корпус, винт, установленную на нем подвижную губку, неподвижную губку, закрепленную в корпусе , механизм перемещения подвижной губки, между которыми закреп- 0 ляется испытываемый гибкий образец LIJВ известном зажиме отсутствует устройство предварительного натяжения образца, что приводит к его провисанию при установке в машине и, 15 как следствие, искажению результатов испытаний.
Наиболее близким по технической сущности к предлагаемому является захват для крепления гибких образ- 20 цов в разрывной машине, содержащий корпус, расмещенные в нем направляющие для образца, вал, установленную на нем подвижную губку, неподвижную губку, закрепленную в Kopnyce l 5 механизм перемещения подвижной губки и устройство предварительного натяжения образца, кинематически связанное с механизмом перемещения подвижной губки 2.30
Недостаток известного устройства - искажение показаний измерений из-за отсутствия учета величины предварительного натяжения образца, а также непостоянства натяжения при испытании образцов различных материалов .
Цель изобретения - повышение точности испытаний.
Указанная цель достигается тем,что в захвате устройство предварительного натяжения образца выполнено в виде установленного в направляющих груза, состоящего из неподвижной и подвижной частей и подпружиненного штока, жестко закрепленного на подвижной части, кинематически связанного с механизмом перемещения подвижной губки, привода, выполненного в виде вала с кулачком на одном конце, взаимодействующим с подвижной частью груза, а другим концом кинематически связанным с основным валом.
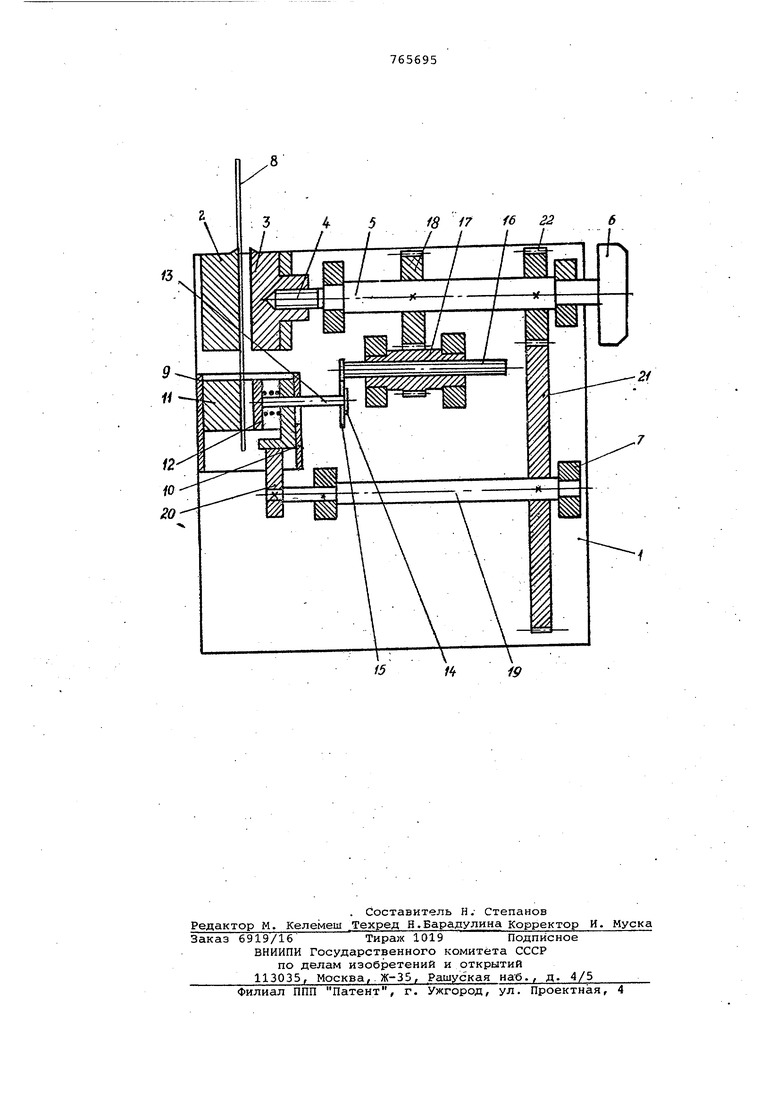
На чертеже изображен предлагаемый захват, общий вид.
Захват содержит корпус 1, неподвижную 2 и подвижную 3 губки. Подвижная губка 3 установлена на резьбовом конце 4 вала 5 его механизма .6 перемещения подвижной губки 3.
Устройство 7 предварительного натяжения образца 8 содержит установленные в направляющих 9 и 10 неподвижную 11 и подвижную 12 части груза, К последней прикреплен подпружиненный шток 13, который своим упором 14 кинематически связан с вилкой 15, установленной на винте 1б, имеющем возможность продольного перемещения вдоль оси неподвижной шестерни 17, взимодействующей с шестерней 18, установленной на валу 5 механизма 6 перемещения подвижной губки 3. Привод устройства 7 предварительного натяжения образца 8 выполнен в виде вала 19 с кулачком 20 на-одном конце и шестерни 21, -вза модействующей с шестерней 22, устаноленной на валу 5 механизма 6 перемещения подвижной губки 3.
Захват работает следующим образом.
Образец 8, предварительно закрепленный в верхнем захвате.машины (на чертеже не указан), пропускается меду раскрытыми губками 2 и 3 и частями 11 и 12 груза. При вращении вала 5 подвижная губка 3 перемещается в сторону неподвижной 2. Одновременно, за счет вращения шестерен 18 и 17 и продольного перемещения винта 16 с вилкой 15, к которой прижат подпружиненный шток 13, подвижная часть 12 груза прижимается к образцу 8. При Дсшьнейшем вращени вала 5 вилка 15 свободно скользит вдоль штока 13.
С момента начала вращения вала 5 до полного закрепления частей 11 и 12 груза на образце 8 кулачок 20 вращается от взаимодействия шестерен 22 и 21. При этом он контактирует с грузом на участке профиля с постояннЕзад радиусом, тем самым удерживая груз в определенном положении. При дальнейшем вращении куламок 20 нисходящим участком профиля освобождает части 11 и 12 груза, который под действием своей массы дает предварительное натяжение обрацу 8, после чего и происходит закрепление образца в губках 2 и 3.
Вращением вала 5 в обратную сторону образец 8 высвобождается из
губок 2 и 3. Кулачок 20 поворачивается, восходящим участком его про-филя части 11 и 12 груза поднимаются, подвижная часть 12 отводится в сторону и за счет перемещения штока 13, связанного упором 14 с вилкой 15, образец 8 освобождается от груза.Элементы захвата занимают исходное положение.
Предлагаемый захват обеспечивает точность измерения деформации образцов на разрывных машинах.Строго тарированное и одинаковое для всех образцов усилие предварительного натяжения учитывается при определении истинных деформаций образца.
Формула изобретения
Захват для крепления гибких образцов в разрывной машине, содержаший корпус,размещенные в нем направляющие для образца, вал, установленную на нем подвижную губку, неподвижную губку, закрепленную в корпусе,
5 механизм перемещения подвижной
.губки и устройство предварительного натяжения образца, кинематически связанное с механизмом перемещения подвижной губки, отличающийся тем, что, с целью повышения точности испытаний, устройство предварительного натяжения выполнено в виде установленного в направляющих груза, состоящего из неподвижной и подвижной частей и подпружиненного штока, жестко закрепленного на подвижной.части, кинематически связанного с механизмом перемещения подвижной губки, привода, выполненного в виде вала с кулачком
0 на одном конце, взаимодействующим с подвижной частью груза, а другим концом кинематически связанным с основным в алом, .
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 266333, кл. G 01 N 3/04, 1968.
2.Авторское свидетельство СССР по заявке № 2585986/25-28,
кл. G 01 N 3/04, 1978 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения линейной деформации бумаги | 1981 |
|
SU1142801A1 |
| Устройство для отпирания замка крышки люка вагона | 1988 |
|
SU1579854A1 |
| Устройство для загрузки транспортных средств сыпучими грузами | 1985 |
|
SU1511167A1 |
| Разрывная машина для испытания материалов | 1981 |
|
SU954848A1 |
| Зажимное устройство для испытания гибких протяженных изделий | 1990 |
|
SU1783359A1 |
| Механизм обрезки нитей на швейной машине | 1980 |
|
SU962368A1 |
| УСТРОЙСТВО ДЛЯ РЕЗКИ НЕПРЕРЫВНО ДВИЖУЩИХСЯ ТРУБ | 1992 |
|
RU2056981C1 |
| Установка для оценки склонности металлов к образованию холодных трещин при сварке | 1990 |
|
SU1824276A1 |
| Автомат для сгибания фигурных изделий | 1981 |
|
SU963646A1 |
| Рука промышленного робота | 1979 |
|
SU837848A1 |