(54) РУКА ПРОМЫШЛЕННОГО РОБОТА
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука манипулятора | 1981 |
|
SU1007961A1 |
| Промышленный робот | 1983 |
|
SU1127765A1 |
| Рука циклового робота | 1976 |
|
SU595143A1 |
| Манипулятор | 1984 |
|
SU1202861A1 |
| Рука промышленного робота | 1980 |
|
SU935262A1 |
| Рука промышленного робота | 1987 |
|
SU1542794A1 |
| Рука манипулятора | 1985 |
|
SU1311929A1 |
| Кисть промышленного робота | 1977 |
|
SU621572A1 |
| Манипулятор | 1981 |
|
SU1229031A1 |
| Устройство для позиционирования руки промышленного робота | 1980 |
|
SU906687A1 |
1
Изобретение относится к машиностроению, а именно к промышленным роботам, применяемым для захвата и ориентации деталей относительно технологического оборудования, а также для переноса этих деталей в различные точки пространства.
Известна рука промышленного робота, содержащая привод и механизмы ориентации, включаюш,ие механизмы подъема, горизонтального перемещения и управления захватом 1.
Недостатком данного устройства является строго установленная последовательность срабатывания механизмов ориентации, что ограничивает технологические возможности использования робота и не обеспечивает взаимозаменяемости механизмов ориентации.
Цель изобретения - расширение технологических возможностей руки промышленного робота.
Для достижения поставленной цели устройство снабжено установленным на механизме подъема дополнительным механизмом ориентации с автономным приводом, причем механизм подъема выполнен в виде моментного силового цилиндра и зубчатореечной передачи, кинематически связанной, с указанным моментным силовым цилиндром, а также снабжено подпружиненной скалкой с регулируемым упором, установленным в корпусе механизма подъема
перпендикулярно оси моментного силового цилиндра, и упором, установленным в корпусе этого цилиндра с возможностью взаимодействия с регулируемым упором.
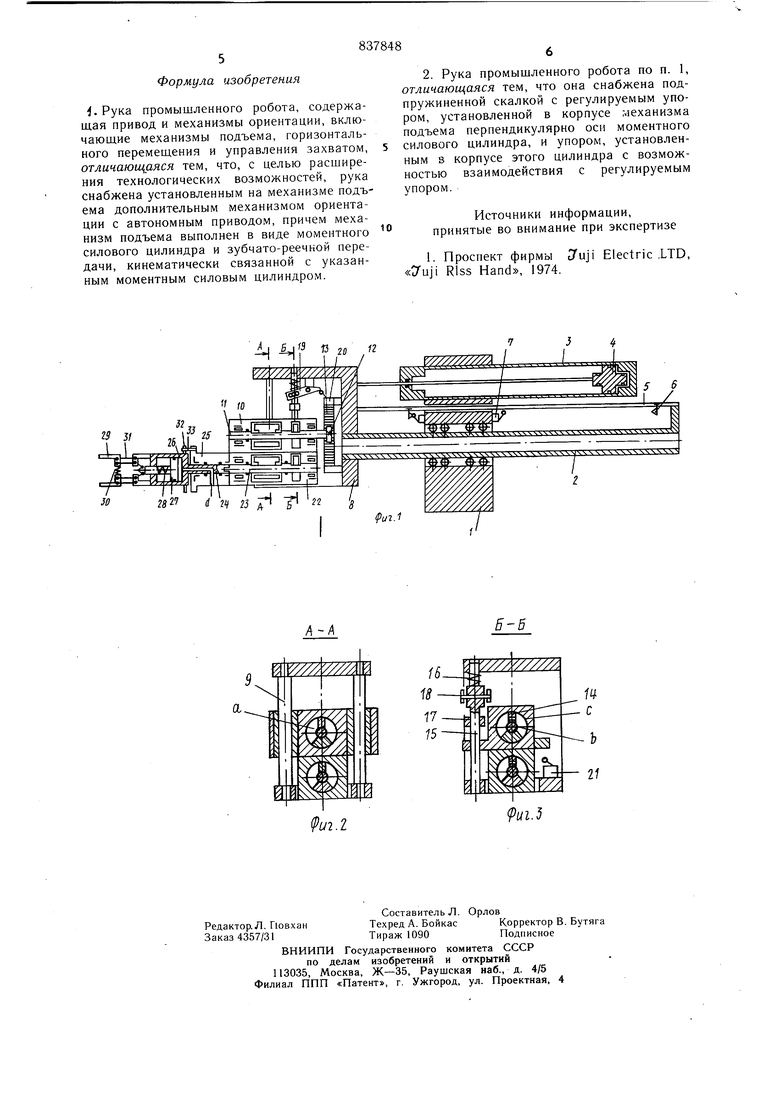
На фиг. 1 изображена рука промыщленного робота, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1.
Конструкцию руки промышленного робота определяют два основных узла - механизм горизонтального выдвижения и кисть. Механиз.м горизонтального выдвижения состоит из корпуса 1, в направляющих качения которого с возможностью перемещения размещена несущая полЭя скалка 2, привода механизма выдвижения силового цилиндра 3 со шток-поршнем 4 и щтанги 5
с упорами 6, взаимодействующими в двух крайних точках позиционирования с датчиками 7 положения. Внутри скалки 2 размещены трубопроводы и электрокабели для подачи энергоносителя приводам и датчикам положения кисти. Кисть руки (фиг. 1) имеет корпус, выполненный в виде вилки 8 с закрепленными на ней двумя направляющими скалками 9. На скалках с возможностью вертикального перемещения установлен механизм подъема схвата, включающий привод, выполненный в виде моментного силового цилиндра 10, на выходном валу 11 которого закреплена щестерня 12, находящаяся в зацеплении с зубчатой рейкой 13, неподвижно закрепленной в корпусе вилки 8. Кроме пневматической рабочей полости а (фиг. 2) моментный силовой цилиндр 10 имеет гидравлическую нолость в демпфирования (фиг. 3), заполненную маслом. Лопасть 14, разделяющая полость демпфирования, имеет калиброванное отверстие с, через которое поток масла дросселируется из одной части полости в другую при вращении вала 11. Между горизонтальными щеками вилки 8 (фиг. 3) в отверстия перпендикулярно оси моментного силового цилиндра 10 установлена скалка 15 с пружиной 16, регулируемым упором 17 и штифтом 18, одновременна проходящих через паз рычага 19. Рычаг 19 установлен на оси, закрепленной на вилке 8, и взаимодействует с датчиком 20 Б верхней точке позиционирования механизма подъема. Нижняя точка позиционирования механизма фиксируется взаимодействием неподвижного упора корпуса моментного силового цилиндра 10 с датчиком 21 положения. Нижняя плоскость корпуса моментного силового цилиндра 10 является привалочной для крепления того или иного типа модуля схвата. (На фиг. 1 изображена кисть, оснащенная одним из таких модулей, выполненным в виде блока, включающего в себя дополнительную степень ориентации механизм поворота схват4 Привод последнего выполнен в виде моментного силового цилиндра 22 по конструктивной схеме, аналогичной приводу механизма подъема. Таким образом, механизм подъема и механизм поворота схвата имеет унифицированный привод. Выходной вал 23 моментного силового цилиндра жестко соединен со схватом при помощи соединительного вала 24, закрепленного с возможностью вращО ния в подшипнике 25. Корпус подшипника 25 крепится к корпусу моментного силового цилиндра 22. Вал 24 и подшипник 25 имеют отверстие d для подвода сжатого воздуха в рабочую полость силового цилиндра 26 - привода механизма закрытия-открытия схвата. Силовой цилиндр имеет шток-порщень 27 и пружину 28. Плоско-параллельное перемещение губок 29 схвата обеспечивает пружина 30 и система рычагов 31 механизма при взаимодействии последних с коническим хвостовиком штока. Корпус пневмоцилиндра 26 имеет два штифта 32, а фланец подшипника 25 несколько отверстий, в одном из которых установлен упор 33, взаимодействующий в двух крайних точках поворота со штифтами 32. Перестановкой упора 32 в одно из отверстий фланца можно производить ступенчатую регулировку угла поворота схвата. Устройство работает следующим образом. При подаче энергоносителя в правую полость силового цилиндра 3 (фиг. 1) штокпорщень 4 со скалкой 2 и кистью перемещаются из крайнего правого положения в крайнее левое до упора поршня в крышку силового цилиндра. При подаче в левую полость последние возвращаются в исходное положение. Фиксация неремещае.мых частей в обеих точках позиционирования осуществляется срабатыванием датчиков 7 от упоров 6 в конце хода. Вертикальное перемещение (подъем и опускание) схвата осуществляется при подаче энергоносителя в одну из рабочих полостей моментного силового цилиндра 10. При этом лопасть поворачивает вал 11 с шестерней 12, которая, обкатываясь по зубчатой рейке 13, заставляет перемещаться корпус моментного силового цилиндра 10 по вертикальным направляющим скалкам 9. Полость гидродемпфера моментного силового цилиндра обеспечивает плавное без ударов перемещение подвижных частей. Вертикальный ход регулируется при помощи упора 17, причем при подходе подвижных частей к верхней точке позиционирования упор корпуса моментного силового цилиндра 10 воздействует на регулируемый упор 17 ска.тки 15, пере.мещая последнюю вверх до упора в вилку 8, сжимает пружину 16 и разворачивает при помощи штифта 18 рычаг 19, который воздействует на датчик 20 положения, фиксируя останов подвижных частей в верхней точке позиционирования. Нижняя точка позиционирования не регулируется, а фиксация ее осуществляется взаи.модействием упора корпуса моментного силового цилиндра 10 с нижним датчиком 21 положения в конце хода опускания. Поворот схвата осуществляется при подаче энергоносителя в одну из рабочих полостей мо.ментного силового цилиндра 22, что заставляет поворачиваться лопасть, вал 23 и связанный с ним схват. Фиксация, в двух крайних точках позиционирования по повороту осуществляется взаимодействием штифтов 32 с установленным на подщипнике упором 33. Зажим губок схвата осупхествляется при подаче сжатого воздуха в рабочую полость силового цилиндра 2о. При этом шток-поршень 27, пере.мещаясь. сжимает пружину 28 и коническим хвостовиком воздействует на рычаги 31, связанные с губками схвата. Разжимаются губки пружинами 30 и 28. Эффективность предлагаемого устройства заключается во взаимозаменяе.мости механизмов ориентации, что расширяет технологические возможности промыщленного робота.
Формула изобретения
.Рука промышленного робота, содержащая привод и механизмы ориентации, включающие механизмы подъема, горизонтального перемещения и управления захватом, отличающаяся тем, что, с целью расширения технологических возможностей, рука снабжена установленным на механизме подъема дополнительным механизмом ориентации с автономным приводом, причем механизм подъема выполнен в виде моментного силового цилиндра и зубчато-реечной передачи, кинематически связанной с указанным моментным силовым цилиндром. Л| 1 Й Zfl 827 rf 2 23 T
Источники информации, принятые во внимание при экспертизе
Pu2.2
yz.5
