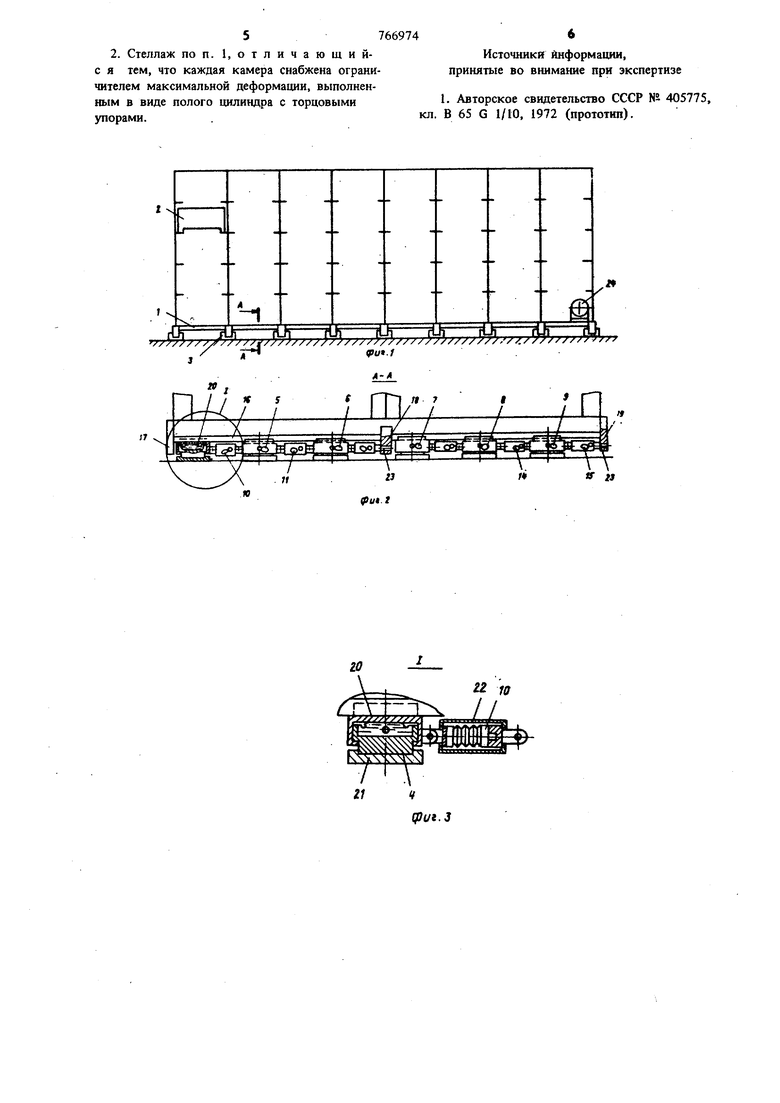
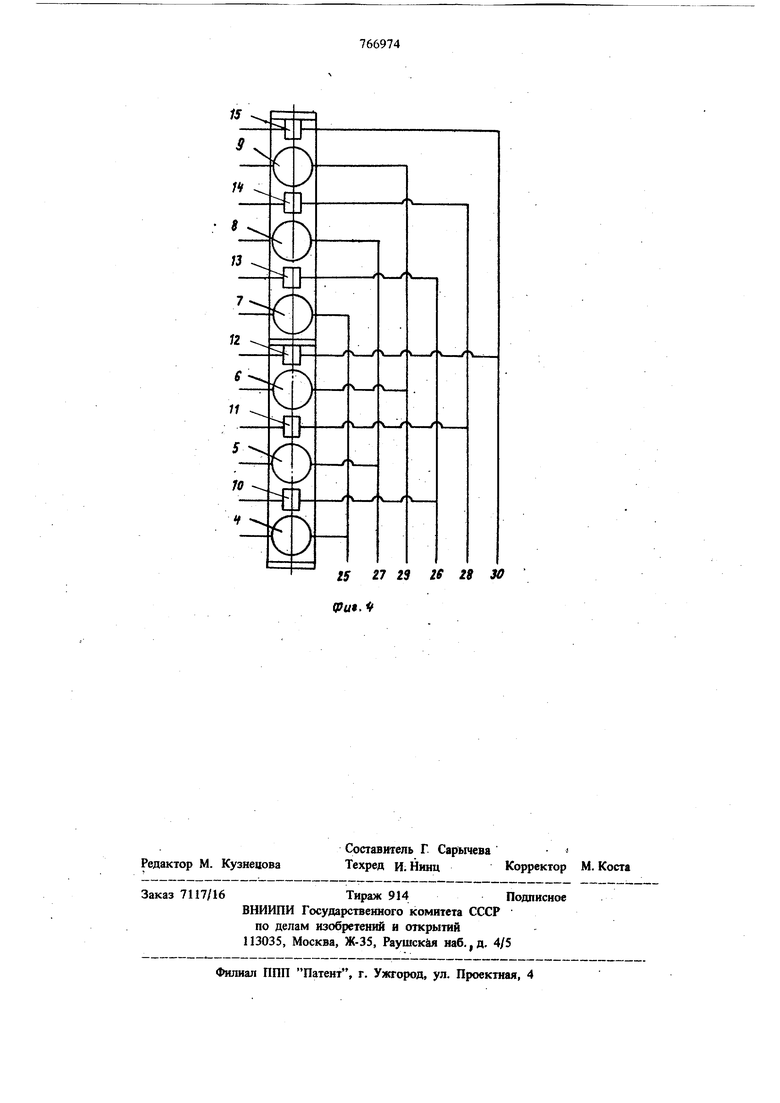
Изобретение относится к складскому хозяйству, а именно к передвижным стеллажам для хранения штучных грузов. Известен передвижной стеллаж, содержащий раму с полками для грузов, связанную с механизмом ее перемещения 1. Однако известный стелла с создает неудобство в эксплуатации за счет необходимости установки на полу направляющих для стеллажа и, кроме того, обладает низкой грузопод.емностью. Цель изобретения - увеличение грузоподъемности стеллажа и удобства его зксплуатацин. Это достигается тем, что к нижней части рамы прикреплены вертикальные пластины с отверстиями, а механизм перемещения содержит прикрепленные к нижней части рамы ряды последовательно соединенных упругих в вертикал ной и горизонтальной плоскостях сильфонных камер, снабженных вводом для подачи жидкос ти, а каждая упругая в горизонтальной плоскости камера размещена между двумя упругими в вертикальной плоскости камерами, при этом на раме установлен гидромотор, причем камеры, упругие в вертикальной плоскосга, снабжены нижними и верхними вкладыщами, контактирующими соответственно с полом и рамой стеллажа, а крайние камеры, упругие в го{жзонтальной плоскости, снабжены штоком, входящим в отверстие пдастни рамы стеллажа. При этом каждая камера снабжена ограничителем максимальной деформации, вьшолненным в виде полого цилиндра с торцовыми упорами. На фиг. 1 схематично изображен стеллаж, общий вид; на ф№. 2 - разрез А-А на фиг., на фиг. 3 - узел X на фиг. 2; на фиг. 4 - шдравлическая схема соединений. Стеллаж имеет раму 1 с ячейками для грузов 2, механизмы 3 передвижения, содержащие последовательно щарнирно соединенные через одну упругие (или сильфонные) в вертикальном направлении камеры 4-9, несущие попарно (например, камеры 4, 7) на себе раму с грузом, и упругие (или сильфонные) в горизонтальном направлении камеры 10-15 служащие для горизонтального перемещения не несущих камер, (например, камер 5, 6, 8, 9) и 3 7 через них рамы. Рама 1 в нижней части имеет направляющие 16 с упорами 17-19. Упругие в вертикальном направлении камеры несущие стеллаж, имеют вкладыши 20 с продольным пазом, контактирующие с направляющей 16 и служащие также ограничителями предельной деформации камер, и вкладыщи 21, контактирующие с полом. Упругие в горизонтальном направлении камеры также имеют свои ограничители 22 предельной деформации, а камеры 12 и 15 имеют упоры 23, входящие в направляющие отверстия упоров 18, 1. Все камеры имеют свой ввод дпя подачи жидкости под давлением. Камеры соединены трубопроводами между собой, как показано на фиг. 4, и с соответствующими камерами 24 гидромашины, приводимой во вращение от электродвигателя (не показан). Электропитание к электродвигателю подводится с помощью кабеля. Для ограничения длины перемещения стеллажа и автоматического отключения электродвигателя предусматривается применение конечных выключателей и упоров (не показаны). Гидромашина 24 обеспечивает подачу жидкости под давлением последовательно в трубопроводы 25-30 и т.д. или в обратном порядке, в зависимости от направления вращения электродвигателя, чем и определяется направление перемещения стеллажа. Стеллаж работает следующим образом. При включении электродвигателя в исходный момент жидкость под давлением поступает по трубопроводу 25 в упругие в вертикальном направлении камеры 4, 7, которые через вкладыши 20, ограничивающие деформацию камер до предельного размера, контактируют с направляющей 16, несущей на себе груз, а через вкладыши 21 упираются в пол. В следующий момент работы электродвигателя жидкость под давлением по трубопроводу 26 поступает в упругие в горизонтальном на;правлении камеры 10, 13, которые, расширяясь перемещают камеры 5, 8 а с ними и камеры 1 6, 12, 14, 9, 15. Камеры 12 и 15 своими толкателями воздействуют на упоры 18, 19 и заставляют перемещаться (скользить) стеллаж относительно неподвижных, воспринимающих (несущих) всю массу стеллажа камер 4, 7. Сколь жение происходит по поверхностям вкладышей. 20 и направляющих 16. В последующий момент давление в камерах 5, 8 возрастает (в камерах 4, 7 может уменьшаться) , и камеры, расширяясь, воспринимают всю массу стеллажа, разгружая камеры 4, 7. После этого подается давление в камеры 11, 1 которые, расширяясь, перемещают камеры 6, 9, а с ними и камеры 12, 15. Камеры 12 и 15 своими толкателями воздействуют на упоры 18, 19 и заставляют перемещаться стеллаж относительно неподвижных камер 5, 8. В последующий момент возрастает давление в камерах 6,9, затем в камерах 12, 15 (давление в камерах 5, 8 и 11, 14 уменьшается), при зтом стеллаж также перемещается, но относительно неподвижных камер 6, 9. Далее цикл повторяется. Для измеления направления перемещения стеллажа необходимо изменить последовательность подачи жидкости под давлением в камеры на обратную, т.е. изменить вращение злектродвигателя и, следовательно, гидромашины на обратное. Для обеспечения синхронности работы всех камер при неравномерной загрузке стеллажа грузами предусмотрены ограничители максимальной деформации. Предложенный передвижной стеллаж имеет большую грузоподъемность, определяемую давлением жидкости в камерах и размерами камер, имеет несложную конструкцию механизма передвижения, может перемещаться по гладкому полу без направляющих путей, что обеспечивает удобство в эксплуатации. Изобретение обеспечивает возможность создания складов с высоким коэффициентом использования площади и объема, оборудованных передвижными высотными стеллажами большой грузоподъемности, обслуживаемыми напольными колесными злектрощтабеллерами. Формула изоб ре тения 1. Передвижной стеллаж, содержащий раму с полками для грузов, связанную с механизмом ее перемещения, отличающийс я тем, что, с целью увеличения грузоподъемности стеллажа и удобства его эксплуатации, к нижней части рамы прикреплены вертикальные пластины с отверстиями J а механизм перемещения содержит прикрепленные к нижней части рамы ряды последовательно соединенных упругих в вертикальной и горизонтальной плоскостях сильфонных камер, снабженных вводом для подачи жидкости, причем каждая упругая в горизонтальной плоскости камера размещена между двумя упругими в вертикальной плоскости камерами, при этом на раме установлен гидрвмотор, и камеры, упругие в вертикальной плоскости, снабжены нижними и верхними вкладышами, контактирующими соответственно с полом и рамой стеллажа, а камеры, упругие в горизонтальной плоскости, снабжены штоком, входящим в отверстие пластин рамы стеллажа.
2. Стеллаж по п. 1, отличающийс я тем, что каждая камера снабжена ограничнтелем максимальной деформации, выполненным в виде полого цилиндра с торцовыми упорами.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР N1 405775, кл. В 65 G 1/10, 1972 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Склад для хранения штучных грузов | 1982 |
|
SU1030265A1 |
| ПОДЪЕМНО-ТРАНСПОРТНОЕ УСТРОЙСТВО ДЛЯ ОБСЛУЖИВАНИЯ СТЕЛЛАЖЕЙ | 1990 |
|
RU2017676C1 |
| Склад для хранения длинномеров | 1989 |
|
SU1698149A1 |
| Устройство для загрузки и разгрузки стеллажей | 1988 |
|
SU1576451A1 |
| СКЛАД ШТУЧНЫХ ГРУЗОВ | 1973 |
|
SU371151A1 |
| РОТОРНАЯ РЕГУЛИРУЕМАЯ РЕВЕРСИВНАЯ МАШИНА | 1997 |
|
RU2126911C1 |
| Штабелер для обслуживания полочных стеллажей | 1982 |
|
SU1031860A1 |
| Грузоподъемная площадка крана-штабелера | 1982 |
|
SU1131779A1 |
| УСТАНОВКА ДЛЯ ПРИЕМА, СКЛАДИРОВАНИЯ И ВЫДАЧИ СКВАЖИННЫХ ТРУБ И ШТАНГ ПРИ СПУСКО-ПОДЪЕМНЫХ ОПЕРАЦИЯХ | 2000 |
|
RU2170325C1 |
| МНОГОЯРУСНАЯ МЕХАНИЗИРОВАННАЯ АВТОСТОЯНКА | 1999 |
|
RU2188290C2 |
гг W
