1
Изобретение относится к промьвдленному транспорту.
Известно устройство для съема изделий с неприводного рольганга, обслуживающего его с боковых сторон . 5
Недостатком известного устройства является то, что в нем не обеспечивается передача изделий вильчатым грузоподъемным механизмом и отвод груза в двух противоположных направ- 10 лениях.
Известно также устройство для распределения штучных грузов по приемнь5м местам, включающее гибкий вертикально-замкнутый тяговый элемент, прохо- j дящий под роликовыми площадками, установленными в местах .съема .
Недостатком этого устройства является то, что оно не обеспечивает накопления грузов в местах съема из- 20 далий и передачу грузов вильчатыми грузоподъемными механизмгили в двух направлениях.
Цель изобретения - расширение технологических возможностей за счет. 25 обеспечения накопления грузов и передачи их вильчатыми грузоподъёмными механизмами в двух направлениях.
Указанная цель достигается teM, что устройство снабжено отсекателями ЗО
грузов и копирс1ми, установленными :,перел роликовыми, площадками, ролики которых выполнены неприводными, при этом гибкий вертикально-замкнутый тяговый элемент имеет свободно вращающиеся ролики, контактирующие с копирами.
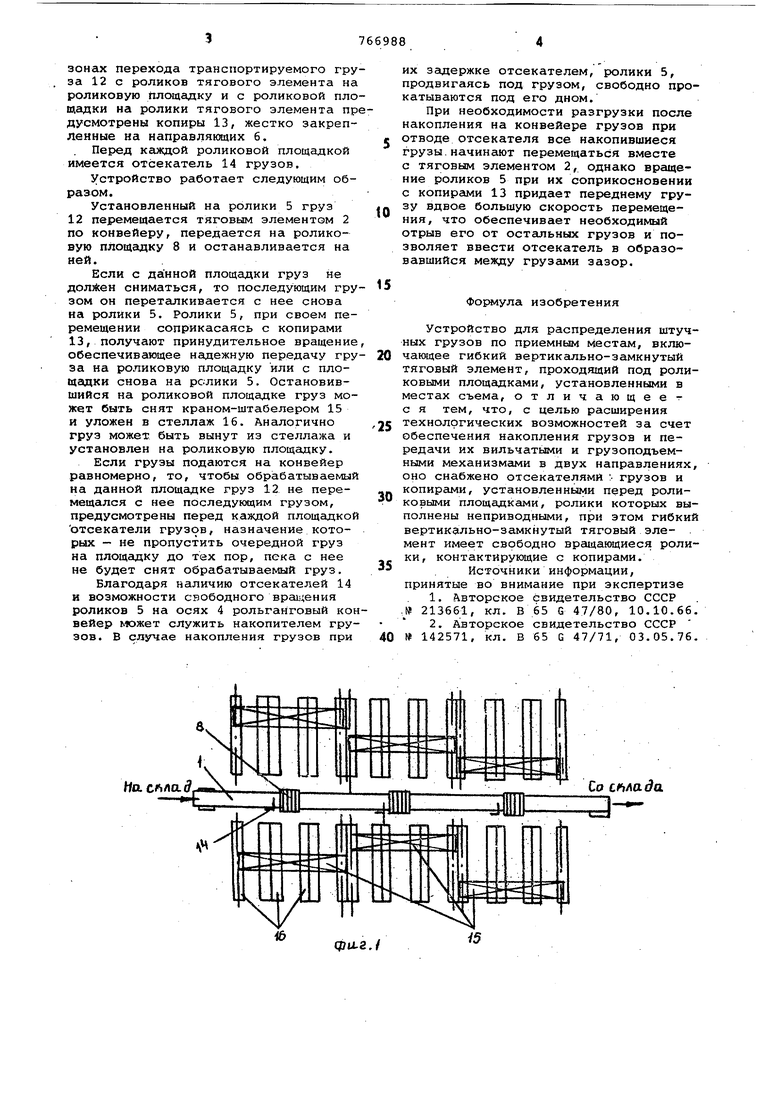
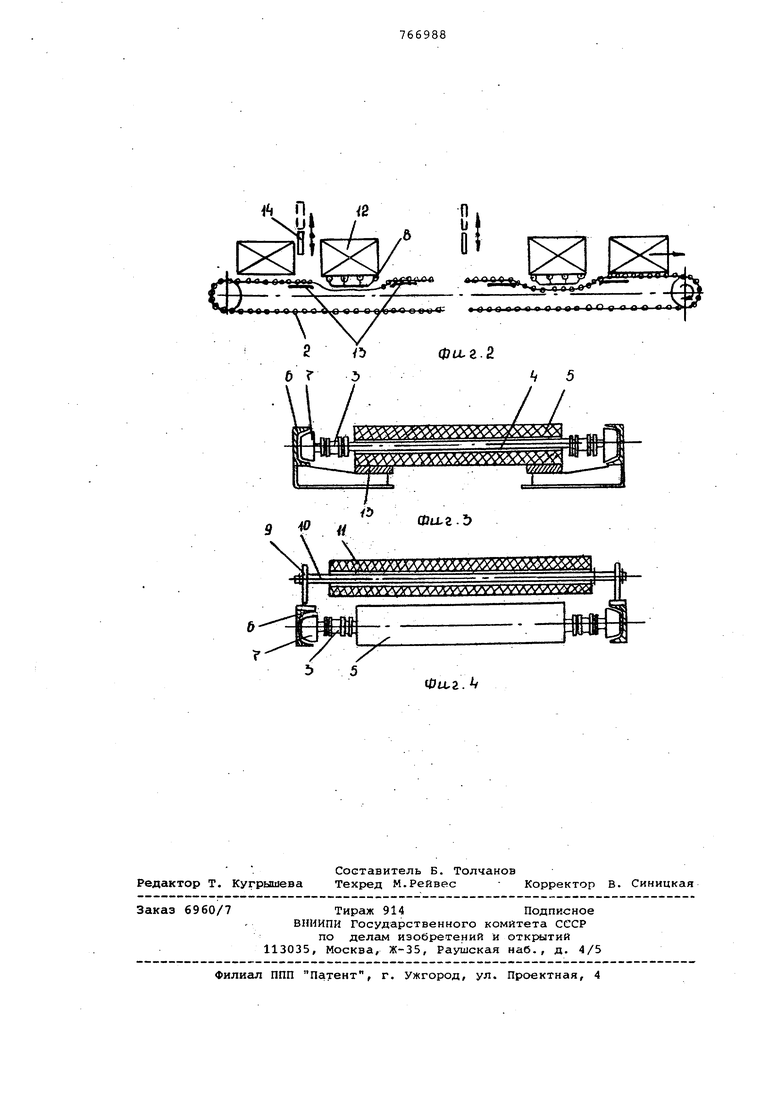
На фиг. 1 изображена схема устройства, общий вид; на фкг. 2 - то же, вид сбоку; на фиг. 3 - ролик тягового элемента, продольный разрез; на фиг. 4 - ролик роликовой площадки, продольный разрез.
Устройство состоит из рольгангового конвейера 1, содержащего вертика.льно-замкнутый тяговый элемент 2, выполненный в виде двух цепей 3 с установленными между ними на осях 4 свободно вpaщaJoщимиcя роликами 5.
Тяговый элемент перемещается в направляющих 6 рамы при помощи катков 7, установленных на тех же осях 4. Направляющие 6 выполнены так, что они огибгиот снизу роликовые площадки 8, представляющие собой установленные на направляющих 6 при помощи стоек 9 свободно вращающиеся на осях 10 ролики 11. Расстояние между зтими роликами должно быть несколько больше ширины вил грузоподъемного органа. В
зонах перехода транспортируемого груза 12 с роликов тягового элемента на роликовую площадку и с роликовой площадки на ролики тягового элемента предусмотрены копиры 13, жестко закрепленные на направляющих 6.
Перед кёиедой роликовой площадкой имеется отсекатель 14 грузов.
Устройство работает следующим образом.
Установленный на ролики 5 груз 12 перемещается тяговым элементом 2 по конвейеру, передается на роликовую площадку 8 и останавливается на ней.
Если с данной площадки груз не должен сниматься, то последующим грузом он переталкивается с нее снова на ролики 5. Ролики 5, при своем перемещении соприкасаясь с копирами 13, получают принудительное вращение обеспечивающее надежную передачу груза на роликовую площадку или с площадки снова на ролики 5. Остановившийся на роликовой площадке груз может быть снят краном-штабелером 15 и уложен в стеллаж 16. Аналогично груз может быть вынут из стеллажа и установлен на роликовую площадку.
Если грузы подаются на конвейер равномерно, то, чтобы обрабатываемый на данной площадке груз 12 не перемещался с нее последующим грузом, предусмотрены перед каждой площадкой отсекатели грузов, назначение которых - не пропустить очередной груз на площадку до тех пор, пека с нее не будет снят обрабатываемый груз.
Благодаря наличию отсекателей 14 и возможности свободного враи;ения роликов 5 на осях 4 рольганговый конвейер может служить накопителем грузов. В случае накопления грузов при
их задержке отсекателем, ролики 5, продвигаясь под грузом, свободно прокатываются под его дном.
При необходимости разгрузки после накопления на конвейере грузов при отводе отсекателя все накопившиеся грузы.начинают перемещаться вместе с тяговым элементом 2, однако вращение роликов 5 при их соприкосновении с копирг№1и 13 придает переднему грузу вдвое большую скорость перемещения, что обеспечивает необходимый отрыв его от остальных грузов и позволяет ввести отсекатель в образовавшийся между грузс1ми зазор.
Формула изобретения
Устройство для распределения штучных грузов по приемным местам, включающее гибкий вертикально-замкнутый тяговый элемент, проходящий под роликовыми площадками, установленными в местах съема, отличающее с я тем, что, с целью расширения технологических возможностей за счет обеспечения накопления грузов и передачи их вильчатыми и грузоподъемными механизмами в двух направлениях, оно снабжено отсекателями : грузов и копирами, установленными перед роликовыми площадками, ролики которых выполнены неприводными, при зтом гибкий вертикально-замкнутый тяговый элемент имеет свободно вргццающиеся ролики, контактирующие с копирами.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР
,№ 213661, кл. В 65 G 47/80, 10.10.66.
2.Авторское свидетельство СССР
№ 142571, кл. В 65 G 47/71, 03.05.76.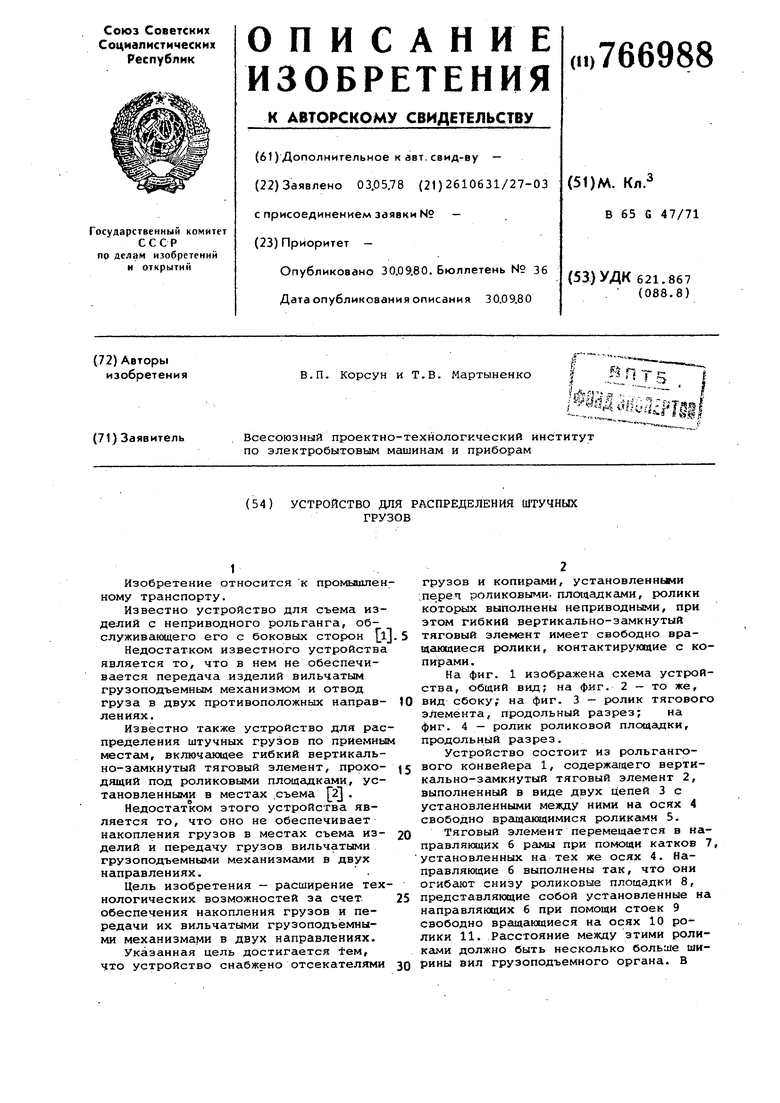
| название | год | авторы | номер документа |
|---|---|---|---|
| Стеллажный штабелер для штучных грузов | 1972 |
|
SU472084A1 |
| Многопозиционный переключатель для пневмотранспортных установок | 1980 |
|
SU975546A1 |
| Склад для хранения штучных грузов | 1981 |
|
SU1030264A1 |
| АВТОМАТИЗИРОВАННАЯ ТРАНСПОРТНО-СКЛАДСКАЯ СИСТЕМА ДЛЯ КОЛЕСНЫХ ШИН | 1990 |
|
RU2013327C1 |
| Устройство для разгрузки и загрузки стеллажей штучными грузами | 1974 |
|
SU547377A1 |
| Тележечный конвейер | 1982 |
|
SU1022882A1 |
| Устройство для погрузки штучных грузов в вагон | 1989 |
|
SU1735170A1 |
| Перегрузочное устройство к конвейерам для штучных грузов | 1977 |
|
SU701897A1 |
| Устройство для загрузки гравитационных многоярусных многорядных стеллажейштучными грузами | 1972 |
|
SU481501A1 |
| Распределительная приводная секция | 1991 |
|
SU1799817A1 |
е
На. с ft по. д.
фо-а,/
., д
Со chAuda
э
Ь 5
Фи,2 п,
