i
Изобретение относится к области механизации и автоматизации подъемно-транспортных работ и может быть использовано в любой области промышленности для перегрузки штучных грузов, как на малые, так и на большие рассто)шия с ощювременным подъемом их на некоторую высоту.
Известно устройство для передачи штучных грузов с одного конвейера на другой включающее приводную тележку с подъемной плат формой и упоры, установленные на пути тележки 1.
Однако это устройство имеет два привода для тележки и для подъемной платформы, что усложняет конструкцию. Кроме того, с его помощью можно передавать грузы только на небольшие расстояния.
Известно также перегрузочное устройство к конвейерам для штучных грузов, включающее станину, плошадкя приема и выдачи, пермешающиеся по рельсам между ограничительными упорами, размещенными в местах приема и выл.ачи, тепежку с укрепленной на ней поавяжной грузовой платформой 2.
Недостатком этого устройства является ни личие двух приводов яия механизма передвижения тележки н механизма подъема платформы, что требует согласования в работе между HiiMH Кроме того, это устройство имеет ограниченное применение, так как его нельзя использовать, например, яия роликовых конвейеров.
Целью изобретения яю1яется рнсипфение технологических возможностей перетрузочного устройства.
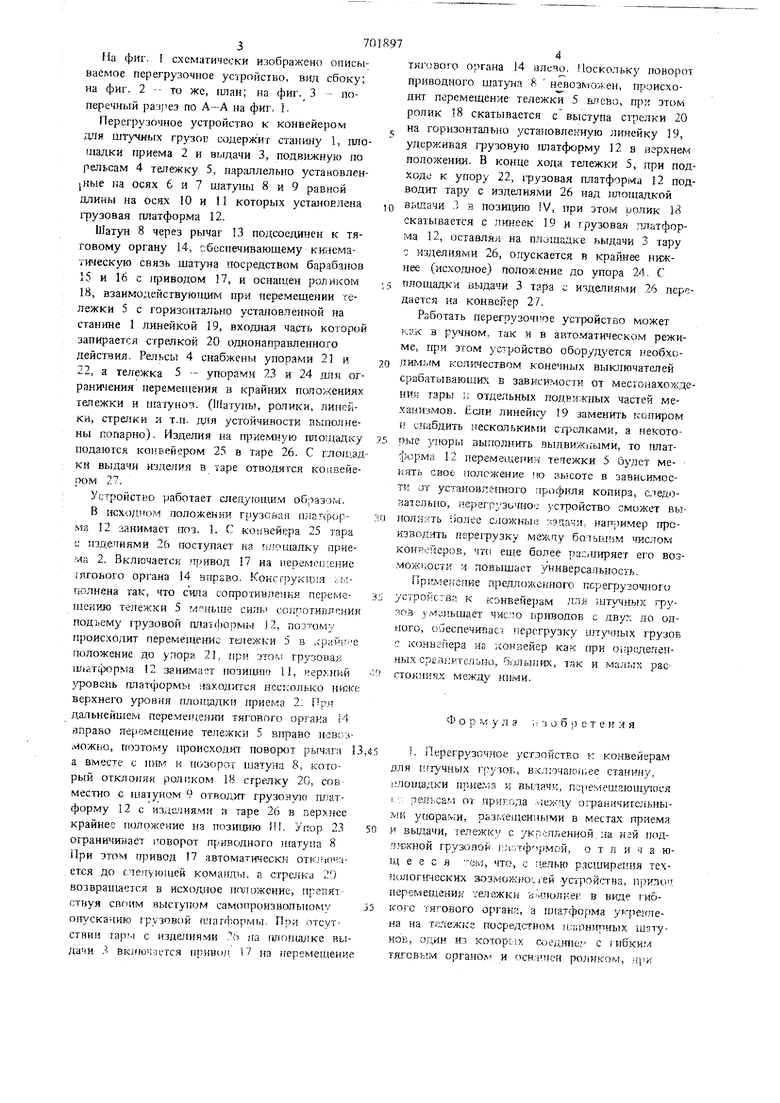
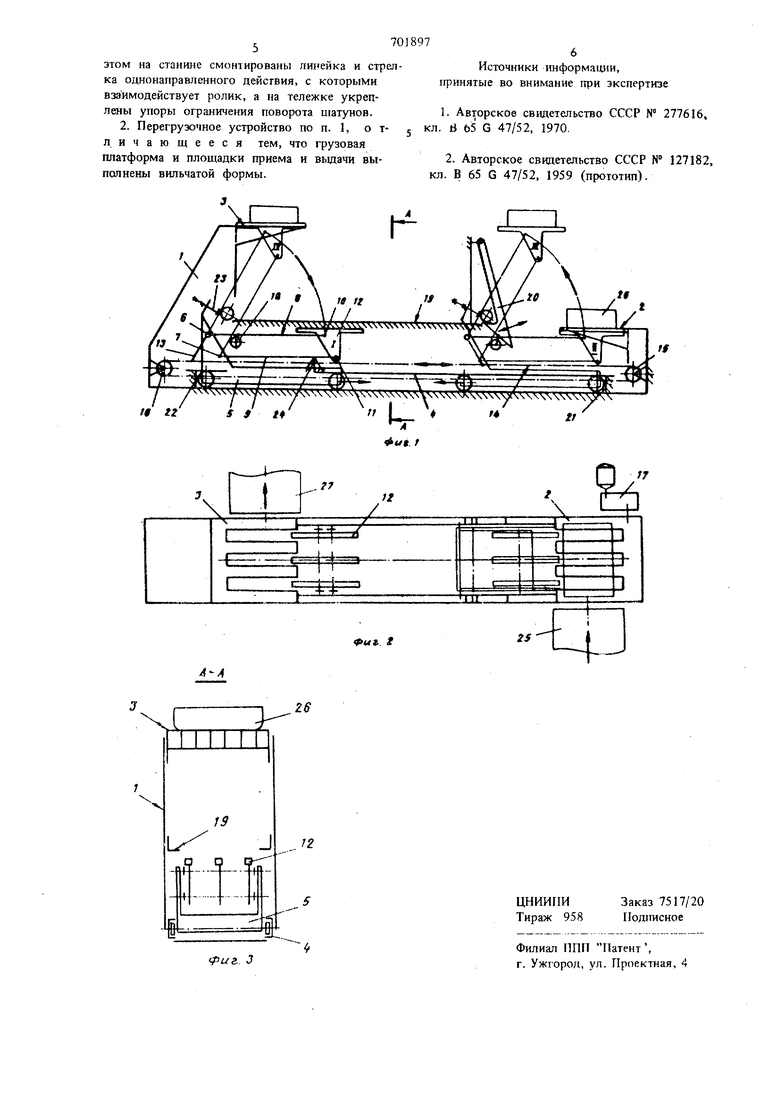
Поставле1шая цель достигается тем, чго привод перемещения тележки выполнен в виде гибкого тягового органа, а платформа T periлена на тележке посредством шарнирных шатунов, один из которых сос.чинен с гибким тяговым органом и оснащен роликом, при этом на станшш смонтированы линейка и ст да1ка однонаправленного действия, с которыми взаимодействует ролик, а на тележке укреплены упоры огранк1ения поворота 1натунон. Кроме того, цзуловая платформа н н.чощадки приема и выдачи вьнтолноны вильчатой формы. 37 На фиг. 1 схематически изображено описываемое перегрузочное устройство, вид сбоку; на фиг. 2 - то же, план; на фиг. 3 - поперечный разрез по А-А на фиг. 1. Перегрузочное устройство к конвейером для штучных грузов содержит станину 1, пло щадки приема 2 и вьгдачи 3, подвижную по рельсам 4 тележку 5, параллельно устаковлен (Кые па осях 6 и 7 шатуны 8 к 9 равной длины на осях 10 и П которых усталонлена фуэовая платформа 12. Шатун 8 через рычаг 13 подсоединен к тяговому органу 14, обеспечивающему ки-яема1ическую связь шатуна посредством барабанов 1.5 и 16 с 1ФИВОДОМ 17, и оснащен poликo f 18, взаимодействуютцим при перемещении тележки 5 с горизонтаггьно установленной на станине 1 линейкой 19, входная ча.сть которой запирается стрелкой 20 однонаправленного действия. Рельсы 4 снабжень упорами 21 и 22, а тележка 5 -- упорами 23 и 24 для ог раничения перемеп1ения в крайних потожениях тележки и нитуно. (iFlaiyjib, ршшки, линейки, стрелки и т.п. для устойчивости выполнены попарно). Изделия на ii 3HeNtHyro площадку подаются конвейером 25 в таре 26. С площад ки изделия в таре отводятся коизейе(юм 27. Устройство работает следугощн.м образом. В исходном положении грузовая п.чагсрорма 12 занимает поз. 1. С ко(вейера 25 тара с; издечиями 26 поступает на лсчиадку прне ла 2. Включается привод 17 на перемеи;ение шгового органа 14 вправо. КокС1рукиу,я .:Ыполнена гак, что сипа сопротивления перемещению тележки 5 меньше силь соггпотипдянкя подъему грузовой ШииЬормы 12, поэтому происходит перемепдение тележки 5 в .сракгее положение до упора 21, ггря этом грузовая 1Шйтфорл5а 2 занима ;т позишпо 11, фовекь платформы находится нес;:олько пюке верхнего уровня плоншдкв приема 2: дальнейшем nepeMeiiieHmi тягового органа 14 вправо перемещение тележки 5 вправо невсз иожмо, поэтому происходят поворот рычи.га 1 а вместе с ним и поЗорот шатуна 8, который отклон5(я роликом 18 стрелку 20, сов местио с шатуном 9 отводит грузовую iwaTформу 12 с изделиями : таре 26 в .)ice крайнее положение на позшдаю III. Упор 23 ограничивает поворот приводного juaTysia 8 При этом привод 17 автоматически отюъочается до CiieiryiomeK кома1ЩЫ, п стрелка 20 возвращается в исходное папижсние, преля:т ствуя cBfiuM высгутюм самопроизвольном;, опусканию г-рузов(1Й плапЬормы. При отсутствии тары с изделиями 2Л яа сиюгипдке выдаШ вю юч;1ется привод 17 ia яеремешение тягового органа 14 влево. Поскольку поворот приводного шатуна 8 невозможен, происходит перемещение тележки 5 ЕИсво, при этом ролик 18 скатывается с выступа стрелки 20 на горизонтально установлекную линейку 19, удерживая хрузовуга платформу 12 в верхне л положеню. В конце хода тележки 5, при подходе к упору 22, 1рузовая платформа 12 подводит тару с изделиями 26 над тошадкой выдачи -1 3 позицию IV, при этом ролик 1й скатывается с лшеек 19 и грузовая платформа 12, оставлял на плошадке выдачи 3 тару -; изделиями 26, оггускается в крайнее нижнее (исходное) положение до упора 24. С гшоша;;ки выдачи 3 тара с изделиями 26 передается на конвейер 27. Работать перегрузочное устройство может КУК в ручном,, так и в авто.матическом режиме, при этом устройство оборудуется )еобходдалым колтеством конечных выю1ючатслей срабатыг5аюшк ; в зависимости от месгола-кождении тары к отдельных подвижных частей механизмов. Если линеЙ1су 19 заменить копиром и снабдить несколькими стрелками, а некоторые упоры выполнить выдвижными, то платформа 12 перемещение течежки 5 будет ме- и:ять свое положение по зь-соте в зависимости от установпе1шого профиля копира, следовательно, перегрузочноо устройство сможет выполнять ;юлее сложные эдачм, иа.п-оимер производить перегрузку между батьшнм числом коин1;йер.5в, что еще более pdz. его воз,мож)ости я повышает универсальность. Прлмегтение предложенного перегрузочного усгройства к конвейерам для штучных грузов умйньшает число приводов с двух до одного, обеспечивает перегрузку шт чиых грузов с Konaefiepa ня конвейер как ирк оьрсделенных ср й1;р:тельно, больших, так и малых рас между HHIMH. Ф о р fv у л э ; г о б 13 е т е и л я 1. Перегрузочное устройство к конвейерам для ; Ty4HbFX рузо1., включа1011;ее станину, 1 лошадки гп-ие.ма к выдачи, пс11е, -1ешаюп1у1ося г; рельсам от природа лгежду огранлчительнымн упорами, размещенными в местах и выдачи, тележку с зкг;с,аленной, на нгй подлюкной rpy3i;jBoft |:л,-:., о т л и -I а ющ е е с л , что, с гелью расширения техгкшогшеских ВОЗМОЖНО . 1 ей устройства, ирклоц перемещения тележки ьмполкег в виде гибкогс тягового органа, а 1и атформа укрегглена на т.гтежкг посредством и.нрнигп гх шзтуной, oryiH из которых a)eafflie с гибким тяговым органом и ocH.-iucH роликом, И1и
701897
этом на станине смонтированы и стрелка однонаправленного действия, с которыми взаимодействует ролик, а на тележке укреплены упоры ограничения поворота шатунов.
2. Перегрузочное устройство по п. 1, от- j кл. В ь5 G 47/52, 1970. л. и чающееся тем, что грузовая
платформа и площадки приема и вьщачи вы-2, Авторское свидетельство СССР № 127182,
попнены вильчатой формы.кл. В 65 G 47/52, 1959 (прототип).
Источники «шформащш, гфинятые во внимание при экспертизе
1. Авторское сввдетельство СССР № 277616. ... Фм i
| название | год | авторы | номер документа |
|---|---|---|---|
| Склад для хранения затаренных грузов (его варианты) | 1984 |
|
SU1217729A1 |
| Устройство для передачи штучных грузов | 1980 |
|
SU906856A1 |
| Подвесной конвейер | 1990 |
|
SU1728091A1 |
| Устройство для захвата и передачи штучных грузов с конвейера на конвейер | 1977 |
|
SU663644A1 |
| Тележка распределительного конвейера | 1988 |
|
SU1641740A1 |
| Загрузочное устройство | 1984 |
|
SU1222604A1 |
| ШТАБЕЛЕУКЛАДЧИК | 1965 |
|
SU174128A1 |
| КРАНОВАЯ УСТАНОВКА С ТРАНСПОРТНОЙ СИСТЕМОЙ НЕПРЕРЫВНОГО ДЕЙСТВИЯ ДЛЯ ТРАНСПОРТИРОВАНИЯ ШТУЧНЫХ ГРУЗОВ | 1990 |
|
RU2041854C1 |
| Конвейерное устройство для перемещения груза из крытого вагона | 1988 |
|
SU1640081A1 |
| Пакеторазборная машина для штучных грузов | 1990 |
|
SU1768480A1 |
26
