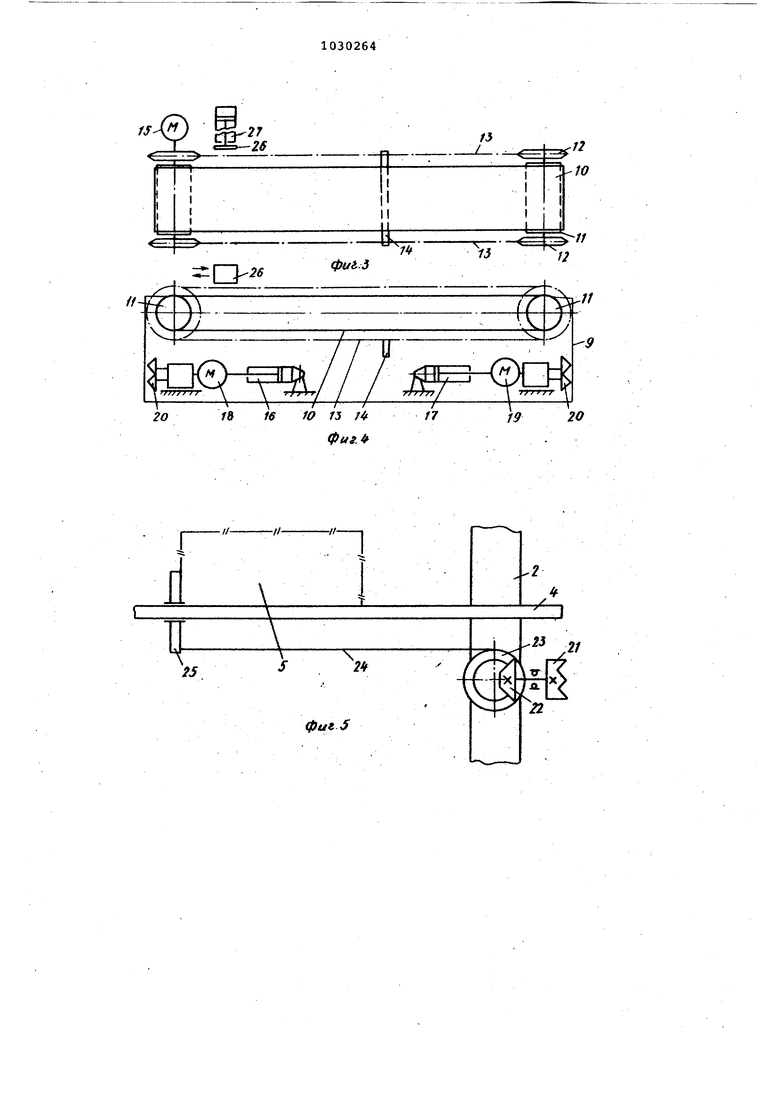
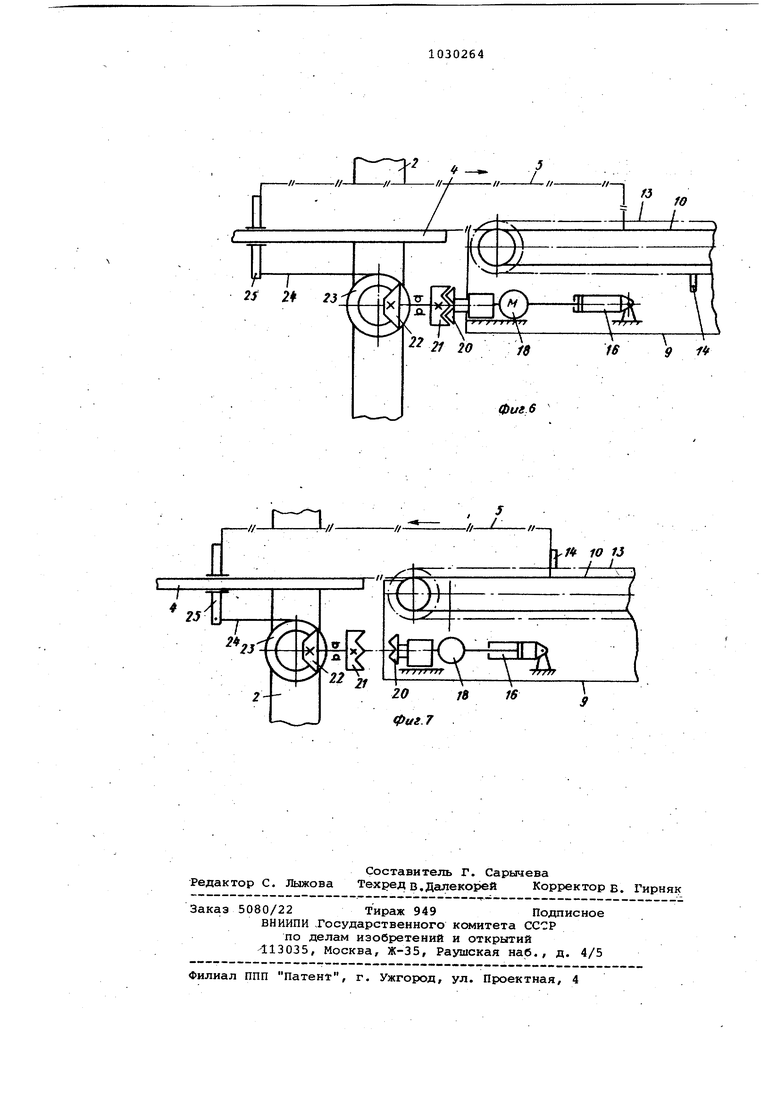
0tiie.f Изобретение относится к складскому хозяйству, в частности к складам для хранения штучных грузов. Известен склад для хранения штучных ГРУЗОВ, содержащий стеллажи, в каждой ячейке которых размещен механизм перемещения груза внутри нее включающий барабан с гибким тяговым органом, и подвижно установленный в проходе между стеллажами кран-штабел лер с грузоподъемной платформой, на которой смонтированы грузонесущий конвейер и расйоложейные по концам .платформы приводы барабанов механизмов перемещения груза внутри ячеек 1 Недостатком этогосклада является недостаточное удобство его эксплуата ции, поскольку механизм перемещения груза внутри ячейки содержит замкну тый гибкий орган, например ленту, на которую в -процессе хранения постоян но опирается груз, в результате чег лента вытягивается и требуется проводить дополнительные работы по натяжению этих органов. Так как ячеек на складе обычно бывает большое ког личество, такая конструкция не позволяет улучшить эксплуатацию склада Целью изобретения является повышение удобства эксплуатации склада. Это достигается тем, что в склад для хранения штучных грузов, содержа щем стеллажи, в каждой ячейке которых размещен механизм перемещения груза внутри нее, включающий барабан с гибким тяговым органом, и подвижно установленный в проходе между стеллажами кран-штабелер с грузоподъемно платформой-, на которой смонтированы грузонесущий конвейер и расположенные по концам площадки приводы барабанов механизмов перемещения груза внутри ячеек, стеллажи снабжены размещенными в каждой ячейке и установленными в Горизонтально расположенных направляющих упорными пластинами тяговые органы выполнены разомкнутыми и к их концам прикреплены упомяну тые пластины, а грузоподъемная площадка крана-штабеллера снабжена сталкивателем, боковыми сторонами прикрепленным к замкнутым тяговым ор ганам, размещенным по бокам грузонесущего конвейера с возможностью образования траектории движения сталкивателя, охватывающей контур грузонесущего конвейера. На фиг. 1 показан склад, общий вид; на фиг. 2 - то же, вид сбокуj на фиг. 3 - грузоподъемная платформа крана-штабеллера, вид сверху на фиг. 4 - то же, вид сбоку; на фиг. 5ячейка стеллажа склада; на фиг. 6 нагрузка грузом ячейки стеллажа с помощью 1 рана-штабелера; на фиг. 7выгрузка груза из ячейки стеллажа . краном штабеллером. Склад содержит стеллажи 1., включащие вертикальные стойкИ 2 и полки 3 с направляющими 4, в ячейках которых размещены различные по габаритам грузы 5.На напольных направляющих на ходовых колесах установлен кран-штабеллер 6. На стойках 7 крана-штабе лера 6 подвижно при помощи канатного привода 8 установлена грузоподъемная платформа 9. На этой платформе расположен приводной ленточный конвейер 10, лента которого огибает по торцам грузоподъемной платформы барабаны 11. Соосно барабанам 11 размещены приводные звездочки 12, диаметр которых больше диаметров барабанов 11. Звездочки 12 огибаются бесконечными тяговьми цепями 13, на которых расположен сталкиватель 14.Барабаны 11 и звездочки 12 приводятся во вращение приводом 15, причем с помощью его и . механизма переключения (не показаны) звездочки и барабаны могут вращаться иак независимо друг от друга, так,и совместно. В нижней части грузоподъемной платформы 9 по ее торцам смонтированы выдвижные при помощи силовых цилиндров 16 и 17 приводы 18 и 19, которые имеют на выходных- валах сцепные полумуфты 20. Ответные сцепные полумуфты 21 расположены на передних стойках 2 стеллажей 1 и соединены коническую зубчатую передачу 22 барабаном 23, на которой намотан. „j, нец троса 24. Другой конец 24 соединен со сталкивателем 25, который имеет возможность перемещать направляющей 4. Сталкива Ъ выполнен в виде вертикальной упорной пластины. С целью обес-печения возможности выборочной разгрузки ячейки стеллажа, когда ячейка загружена несколькими грузами, на грузоподъемной платфоЕме установлен перемещающийся вдоль платформы поперечный сталкиватель 26, установленный на штоке силового цилиндра 27. Механизм перемещения сталкивателя . ; вдоль платформы не показан. Склад работает следующим орразом. Для выгрузки из стеллажа 1 штуч-, ного груза 5 (длинномерного или не ,: длинномерного) кран-штабелер 6 с грузоподъемной платформой 9 перемещается к соответствующей ячейке стелла-. жа 1. В исходномоположении процесса выгрузки груза из стеллажа выдвижные приводы 18 и 19 с полумуфтами 20 находятся в пределах габарита платформы, а сталкиватель 14 находится под конвейером 10, под которьвл он находится и весь период выгрузки груза из стеллажа. После перемещения штабелера ic соответствующей ячейке стеллажа полумуфта 20 располагается напротив ответной полумуфты 21, расположенной на передней стойке стеллажа соответствующей ячейки. Затем реагент подается в полость сияового цилиндра 16, при этом шток цилиндра толкает привод 18 до того момента, когда войдут в зацепление полумуфты 20 и 21. Включается привод 18, который передает вращение через полумуфты 20 и 21 и коническую передачу 22 на барабан 23Трос 24, наматываясь на барабан 23, тащит за собой сталкиватель 25, который сталкивает груз 5 из ячейки стеллажа на ленту конвейера 10. Лента конвейера приводится в движени приводом 15 и транспортирует вдоль платформы 9 сталкиваемый из ячейки груз 5, после чего лента останавливается. .
ЕСЛИ в ячейке .стеллажа находилось несколько грузов, то по потребности можно выгрузить из стеллажа нужное количество грузов. После окончания разгрузки грузов 5 из ячейки стеллажа 1 силовой цилиндр 16 возвращает в исходное положение привод 18 и гру транспортируется к месту разгрузки. При разгрузке платформы 9 в ячейку стеллажа 1 включается привод 15, который приводит в движение ленту транспортера 1Й и цепи 13 со сталкив телам 14, а последний, перемещаясь на цепях, переходит в положение над транспортером. Груз 5 при помощи транспортера 10 и сталкйвателя 14 сталкивается в нужную ячейку стеллажа: При движении груза 5 в ячейке стеллажа этот груз толкает.перед собой сталкиватель 25, который разматывает трос 24 на барабане 23. В конце процесса разгрузки сталкивател 25 переходит в .положение под транспортером, а между грузоподъемной платфбЕ 10й 9 и полкой 3 стеллажа 1 образуется зазор.
Для выборочной разгрузки грузов из ячейки стеллажа, в которой размещены несколько грузов/ сначала все грузы сталкиваются из ячейки на ленту 10 транспортера/ затем поперечный сталкиватель 26 устанавливается напротив нужного труза и с помощью силового цилиндра 27 сталкивается в приемную зону, после чего рставшиеся грузы обратно заталкиваются в ячейку
0 стеллажа.
В приведенном примере стеллажи 1 размещены с двух сторон от кранаштабелера. Возможно исполнение шта. белера, когда приводы 1В и 19 выполне ны не выдвижными относительно платформы, а сцепление полумуфт 20 приводов с полумуфтами. 21 стеллажей происходит посредством продольного перемещения всей платформы 9 относительно
0 крана-щтабелера 6.
Предлагаемая конструкция склада для хранения штучных грузов позволяет загружать и выгружать как длинномерные, так и штучные грузы различной длины без специальных поддонов и на поддонах. Она позволяет также комплектовать заказы из различных грузов и повышает эффективность работы за
0 счет обеспечения непрерывного цикла загрузки и разгрузки нескольких грут зов, которые могут разместиться на платформе за один раз. Кроме того, предложенная конструкция склада позволяет исключить замкнутые гибкие тяговые органы в каждой ячейке стеллажей, оставив этот орган только на грузоподъемной платформе, что позволяет повысить удобство эксплуатации склада, исключив дополнительные на0
лад0чные работы.

| название | год | авторы | номер документа |
|---|---|---|---|
| Грузоподъемная площадка крана-штабелера | 1980 |
|
SU981126A1 |
| ВЗССО'гОЗНАЯ | 1973 |
|
SU368153A1 |
| Механизированный склад для хранения кабельных барабанов | 1981 |
|
SU1011467A1 |
| Склад для хранения штучных грузов | 1986 |
|
SU1368232A1 |
| Склад для штучных грузов | 1973 |
|
SU590193A1 |
| Грузоподъемная площадка крана- шТАбЕлЕРА | 1978 |
|
SU796128A1 |
| СКЛАД ДЛЯ ХРАНЕНИЯ И ПЕРЕМЕЩЕНИЯ ТАРНО-ШТУЧНЫХ ГРУЗОВ | 1993 |
|
RU2077466C1 |
| Устройство для хранения штучных грузов | 1990 |
|
SU1779654A1 |
| Устройство для загрузки и разгруз-Ки СТЕллАжЕй | 1979 |
|
SU812680A1 |
| Грузоподъемная площадка крана-штабелера | 1981 |
|
SU1014788A1 |
СКЛАД ДЛЯ ХРАНЕНИЯ ШТУЧНЫХ ГРУЗОВ, содержащий Ьтеллажи, в каждой ячейке: которых размещен механизм перемещения груза внутри нее, включэхйа)лЛ барабан с гибким тяговым органом, и подвижно установленный в проходе между стеллажами кран-штабелер с грузоподъемной платформой, на которой смонтированы грузонесущий конвейер и расположенные по концам плоп щадки приводы барабанов механизмов перемещения груза внутри ячеек, о т л и ч а ю щ и и с я тем, что,с целью повышения удобства эксплуатации, стеллажи снабжены размещенными в каждой ячейке и установленными в горизонтально расположенных направляющих упорными пластинами, тяговые органы выполнены разомкнутыми и к их концам прикреплены упомянутые пластины, а грузоподъемная платформа крана-Таггабелера снабжена сталкиватет лем, боковыми сторонамиприкреплен- , ным к замкнутым тяговым органам, размещенным по бокам грузонесущего конвейеера с возможностью образования траектории.движения сталкивателя, охватывающей контур грузонесущего конвейера.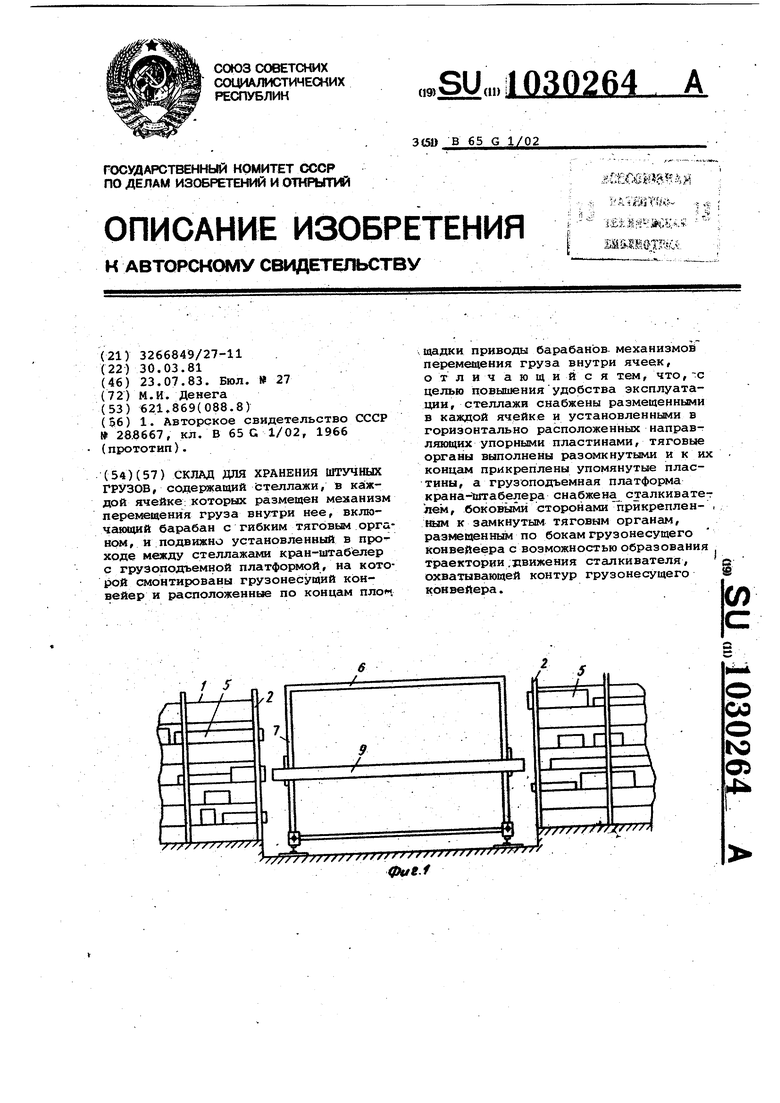
//27
0ui.i
O
//-ty v:
/3
Г2 -10
12
X Ч
.//
i
:
S
25
фиг -S Г
П
