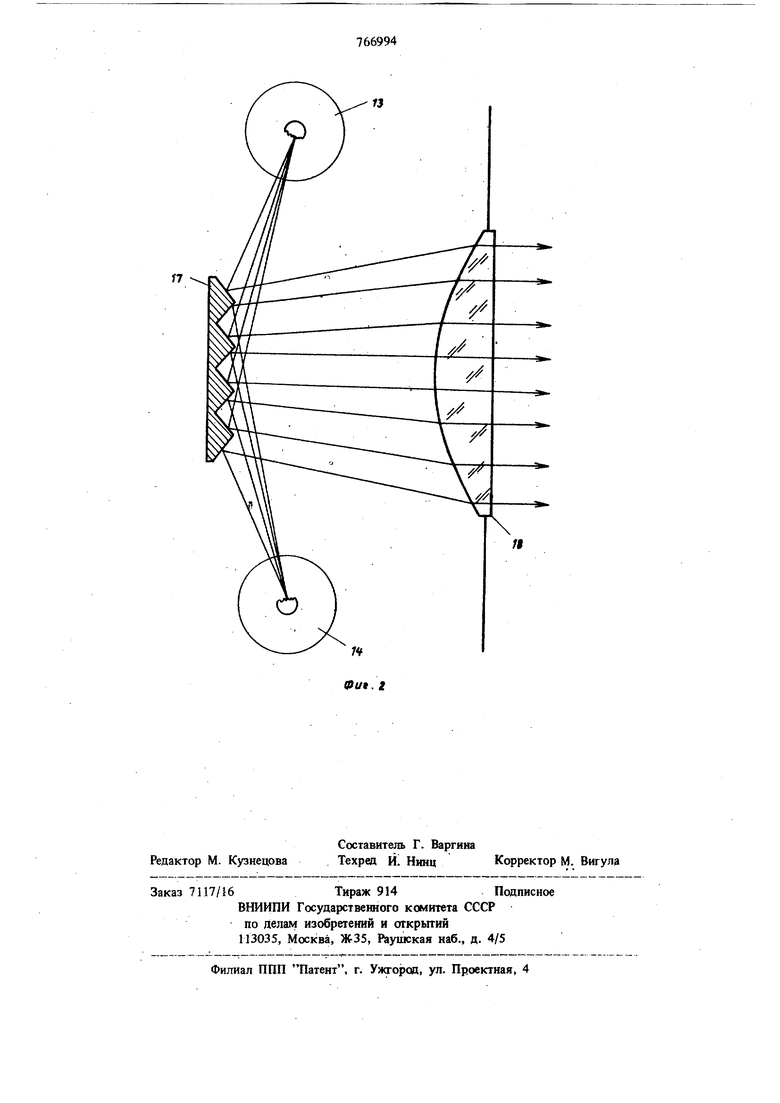
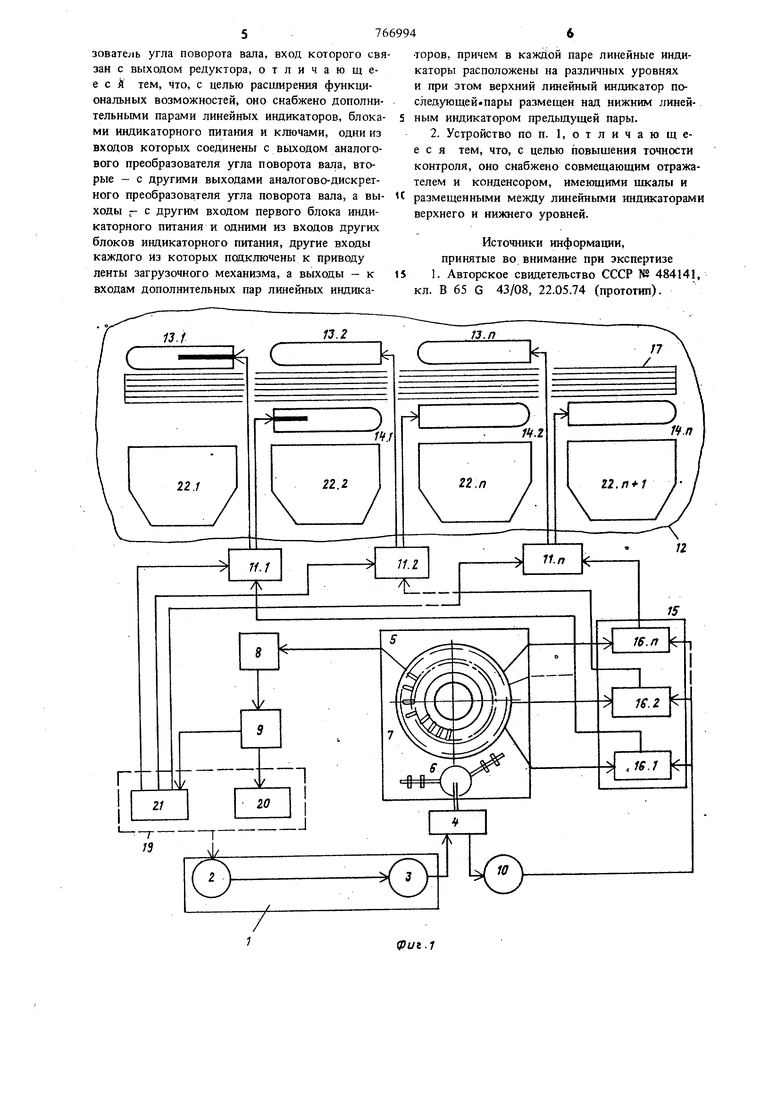
Изобретение относится к области автоматизации процессов загрузки емкостей сыпучим материалом. Наиболее близким к изобретению по своей технической сущности и достигаемому результату является устройство для контроля и управления ленточным загрузочным механизмом, содержащее блок трансформаторной дистанцион ной передачи, сельсин-датчик которого кинематически связан с загрузочным механизмом, а выход сельсин-приемника через редуктор и один из выходов аналогово-дискретного яреобразователя угла поворота вала соединен со вхо дом командного блока, к. выходу которого под ключен исполнительный блок, связанный выходом с приводом передвижения загрузочного ме ханизма; пару линейных индикаторов, размещенных по одному над символами бункеров и соединенных с выходами блока индикаторного питания, один из входов которого соединен с приводом ленты загрузочного механизмами аналоговый преобразователь угла поворота вала, вход которого связан с выходом редуктора II. Однако недостаточная функциональная возможность такого устройства не обеспечивает индикации положения относительно бункеров ленточного загрузочного механизма при длине его меньше половины дли1п 1 перемещения. Недостатком устройства является также низкая точность контроля при расположении блока индикации на значительном расстоянии, например при расположении его на мнемощите. Цель изобретения - расширение функциональHbtx возможностей. Указанная цель достигается тем, что устройство снабжено дополнительными парами линейных индикаторов, блоками индикаторного питания и ключами, одни из входов которых соединены с выходом аналогового преобразователя угла поворота вала, вторые - с другими выходами аналогово-дискретного преобразователя угла поворота вала, а выходы - с другим входом первого блока индикаторного питания и одними из входов других блоков индикаторного питания, другие входы каждого из которых подключены к приводу лекгь загрузочн у го механизма, а выходы - к входам допол376нительных пар линейных индикаторов, причем в каждой паре линейные индикаторы расположены на различных уровнях и при этом верхний линейный индикатор последующей пары размещен над нижним линейнь(К1 индикатором предьщущей пары. Кроме того, устройство с целью повышения точности контроля снабжено совмещающим отражателем и конденсором, имеющими щкалы и размещенными между линейными шщикаторами верхнего и нижнего уровней. На фиг. 1 изображена схема устройства; ш фиг. 2 - блок индикации, вид сбоку. Устройство содержит блок 1 трансформаторной дистанционной передачи с сельсин-датчик ом 2 и сельсин-приемником 3, редуктор 4, анало гово-дискретный преобразователь 5 угла поворо та вала с магнитодержателями 6, закрепленными на валу редуктора 4 и разнесенными на угол, равный длине конвейера (в соответствующем масиггабе), а также с комплектом датчиков. 7 дискретной информации о положении загрузочного механизма, например герконов, расположенных рациально на соосиом с валом редуктора 4 диске и закрепленных в пазах, выбранных по окружностям со смещением, обеспечивающим привязку датчиков к объекту (длине ряда бункеров и диаметру бункера). Устройство содержит также командный блок 8, исполнительный блок 9, аналоговый преобра-г зователь 10 угла поворота вала, блоки индикаторного питания 11.1-М.п, блок 12 индикации выполненный на линейных газоразрядных индикаторах 13.1-13.п и 14.1-14.п, подсоедийенных .парами к блокам ющикаторного питания, блок 15 ключей, содержа1Д}- Й п ключей 16.1 -16.п, совмещающий отражатель 17 с конденсором 18 имеющие шкаль и размещенные между линейными индикаторами верхнего и нижнего уровней. Устройство содержит также загрузочный механизм 19 с приводами 20 и 2 соответствегш передвижения меха1шзма и вращения ленты. Линейные газоразрядные индикаторы размещены в два ряда над символами бункеров 22.1-22.П+1, причем верхний линейный индикатор последующей пары размещен над нижним линейным индикатором предыдущей пары. Устройство работает следующим образом. При передвижении механизма 19 кинематическая связь преобразует его прямолинейное движение ро вpaщaтeJrьнQe движение ротора се син-датчшса 2, вследствие чего ротор сельсинприемника 3 поворачивается на тот же угол. При этом кинематически связанный с ним редуктор 4 передает вращение на магнктодержатели 6. При перемещении магнитодержателей с магншамн последние (через магнитное поле) воздействуют на датчики 7 дискретной информ ции, которые выдают информацию о положении головок механизма 19 и посылают ее в блок 8, а при прохождении головками загрузочного механизма границы между двумя смежными бункерами - в блок 15 ключей. Причем длительность сигнала (короткий - в первом случае и длительный во втором) достигается формой и размерами магнитов, а также применепием специального экрана, установленного на держателе герконов. Таким образом, диск с датчиками 7 и магнитодержателями 6 с магнитами представляет собой действующую физическую (в соответствующем масщтабе) модель объекта, выдающую в зависимости от положения загрузочного механизма дискретную информацию на другие функциональные узлы устройства. Блок 8 представляет собой логический автомат, реализующий по входным сигналам и командам оператора алгоритмы управления загрузочным механизмом. Сельсин-приемник 3 через редуктор 4 связан с аналоговым преобразователем 10 угла поворота вала, являющимся преобразователем угла поворота в аналоговый электрический сигнал, величина которого пропорциональна перемещешпо загрузочного механизма. Этот сигнал для кшочей 16.1-16. п является входным напряжением. Выходное напряжение ключа подается на блок индикаторного гштания, из которого управляющее напряжение подается на соответствующие пары индикаторов 13.1-14.1, 13.п-14.п только при работе привода 21 ленты. Перемещающиеся столбы свечения индикато ров верхнего и нижнего уровней, совмещаясь в одну линию свечения отражателем 17, имитируют в определенном масштабе длину механизма 19 и его перемещение относительно бункеров 22.1-22П+1. Формула изобретения 1. Устройство для контроля и управления ленточным загрузочным механизмом, содержащее блок трансформаторной дистанционной передачи, сельсиИ-датчик которого кинематически связан с загрузочным механизмом, а выход сельсин-приемника через редуктор и один из выходов аналогово-дискретного преобразователя угла поворота вала соедини со входом командного блока, к выходу которого подключен исполнительный блок, связанный выходом с приводом передвижения загрузочного механизма; пару линейных индикаторов, размещенных по одному над символами бункеров и соединенных с выходами блока индикаторного питания, один из входов которого соединен с приводом ленты загрузочного механизма;и аналоговый преобразователь угла поворота вала, вход которого свя зан с выходом редуктора, отличающее с тем, что, с целью расширения функциональных возможностей, оно снабжено дополнительными парами линейных индикаторов, блоками индикаторного питания и ключами, одни из входов которых соединены с вьгходом аналогового преобразователя угла поворота вала, вторые - с другими выходами аналогово-дискретного преобразователя угла поворота вала, а выходы г- с другим входом первого блока индикаторного питания и одними из входов других блоков индикаторного питания, другие входы каждого из которых подключены к приводу ленты загрузочного механизма, а выходы - к входам дополнительных пар линейных индикаторов, причем в каждой паре линейные индикаторы расположены на различных уровнях и при этом верхний линейный индикатор последующей, пары размещен над нижним линейным индикатором предыдущей пары. 2. Устройство по п. 1, о т л и ч а ю щ ее с я тем, что, с целью повышения точности контроля, оно снабжено совмещающим отражателем и конденсором, имеющими шкалы и размещенными между линейньт1И индикаторами верхнего и нижнего уровней. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР NS 484141, кл. В 65 G 43/08, 22.05.74 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля и управления ленточным загрузочным механизмом | 1980 |
|
SU918208A1 |
| Устройство для контроля и управления ленточным загрузочным механизмом | 1974 |
|
SU484141A1 |
| Устройство для контроля состояния загрузочного распределителя | 1978 |
|
SU742890A1 |
| УКАЗАТЕЛЬ ПОЛОЖЕНИЯ ПОГЛОЩАЮЩЕГО СТЕРЖНЯ В АКТИВНОЙ ЗОНЕ РЕАКТОРА | 2013 |
|
RU2540441C2 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В ЭЛЕКТРИЧЕСКИЙ ИНФОРМАЦИОННЫЙ СИГНАЛ | 2007 |
|
RU2327222C1 |
| Следящая система | 1979 |
|
SU903803A2 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В НАПРЯЖЕНИЕ | 1983 |
|
SU1840567A1 |
| Система управления корабельной трёхкоординатной радиолокационной станцией, антенным устройством и приводной частью для неё | 2020 |
|
RU2759515C1 |
| Устройство для определения положения ползуна кривошипно-шатунного механизма | 1989 |
|
SU1753257A1 |
| Преобразователь угла поворота антенны радиолокационной станции в код | 1983 |
|
SU1119052A1 |