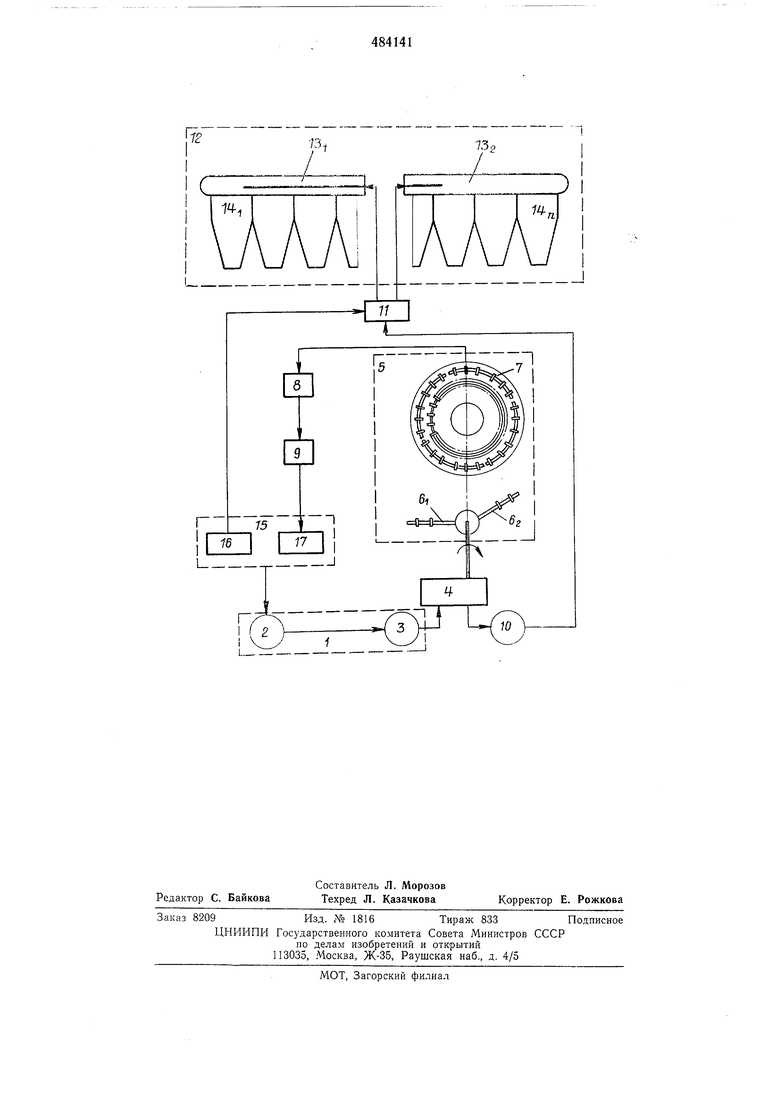
приводом ленты 16 и приводо м передвижения 17.
Работа предложениого устройства происходит следующим образом.
При передвижении загрузочного механизма 15 кинематическая связь преобразует его прямолинейное движение so вращательное движение ротора сельсин-датчика 2, вследствие чего ротор сельсин-лриеМНика 3 поворачивается на тот же угол. При это.м кинематически связанный с НИМ редукто р 4 передает вращение в определенном масштабе на ,магнитодержатели 6i и 62. Перемещаясь по окружности, постоянные магниты воздействуют на комплект датчиков 7 дискретной информации, .которые считывают информацию о передвижении загрузочного механизма 15 и посылают ее в командный блок 8, который по заданной программе через исполнительный блок 9 управляет приводом передвижения 17.
Аналоговый преобразователь 10 угла, также связанный с сельсин-приемником 3 посредством редуктора 4, вырабатывает аналоговьш электрический сигнал, который пропорционален перемещению загрузочного механизма 15. Этот электрический сигнал воспринимается блоком И индикаторного питания и далее подается на газоразрядные индикаторы 13i и 132.
Перемещающийся столб свечения индикаторов постоянной длины имитирует в определенном масштабе длину загрузочного механизма 15 и его перемещение относительно емкостей 14i - 14„ ,
Постоянство длины столба свечения обеспечивается тем, что один индикатор (например, 13) запитан от прямого выхода блока II, а другой - от ин1версного через источник напряжения смещения в прямом направлении. Соединение же одного из входов блока 11 с приводом ленты 16 позволяет совместить визуальную информацию о положении загрузоч,ного механизма 15 и о норме-за10 гружаемой емкости.
Предмет изобретения
Устройство для контроля и управления ленточным загрузочным механизмом, содержащее блок трансформаторной дистанционной передачи, вход сельсин-датчика которого кинематически йвязан с за(грузочны1м механизмом, а выход сельсин-1приемника через редуктор и аналого-дискретный преобразователь угла -поворота вала подключен ко входу командного блока, исполнительный блок, вход которого соединен с выходом ко.мандното блока, а выход - с приводом передвижения загрузочного механизма, блок индикации, входы которого подключены к выходам блока индикаторного питания, отличающееся тем, что, с целью повышения точности контроля и управления, оно содержит аналоговый нреобразователь угла поворота
0 вала, причем вход аналогового преобразователя угла поворота вала связан с редуктором, а выход соединен с одним из входов блока индикаториаго питания, другой вход которого подключен к приводу ленты загрузочного механизма.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля и управления ленточным загрузочным механизмом | 1980 |
|
SU918208A1 |
| Устройство для контроля и управления ленточным загрузочным механизмом | 1977 |
|
SU766994A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ И ВИЗУАЛЬНОГО НАБЛЮДЕНИЯ ЗА ПОЛОЖЕНИЕМ ЗАГРУЗОЧНОГО МЕХАНИЗМА ПРИ ЗАГРУЗКЕ ЕМКОСТЕЙ СЫПУЧИМГ-^^йШб-ТЕХНадяд: 1^_оИ5Лг-^ОТЕКАI. --^^^oi^Si^ | 1972 |
|
SU332008A1 |
| СИСТЕМА КОНТРОЛЯ РАБОТЫ РАСПРЕДЕЛИТЕЛЯ ШИХТЫ ДОМЕННОЙ ПЕЧИ | 1998 |
|
RU2126056C1 |
| УКАЗАТЕЛЬ ПОЛОЖЕНИЯ ПОГЛОЩАЮЩЕГО СТЕРЖНЯ В АКТИВНОЙ ЗОНЕ РЕАКТОРА | 2013 |
|
RU2540441C2 |
| Гидропривод гидротехнического затвора | 1988 |
|
SU1631114A1 |
| Электромеханическое устройство управления летучими ножницами | 1971 |
|
SU473574A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ГИБКИМИ СТЕНКАМИ СОПЛА АЭРОДИНАМИЧЕСКОЙ ТРУБЫ | 2012 |
|
RU2506556C1 |
| Система управления корабельной трёхкоординатной радиолокационной станцией, антенным устройством и приводной частью для неё | 2020 |
|
RU2759515C1 |
| СИСТЕМА ДИАГНОСТИКИ КОЛОНН ГИДРАВЛИЧЕСКОГО ШТАМПОВОЧНОГО ПРЕССА КОЛОННОЙ КОНСТРУКЦИИ | 2007 |
|
RU2364511C2 |