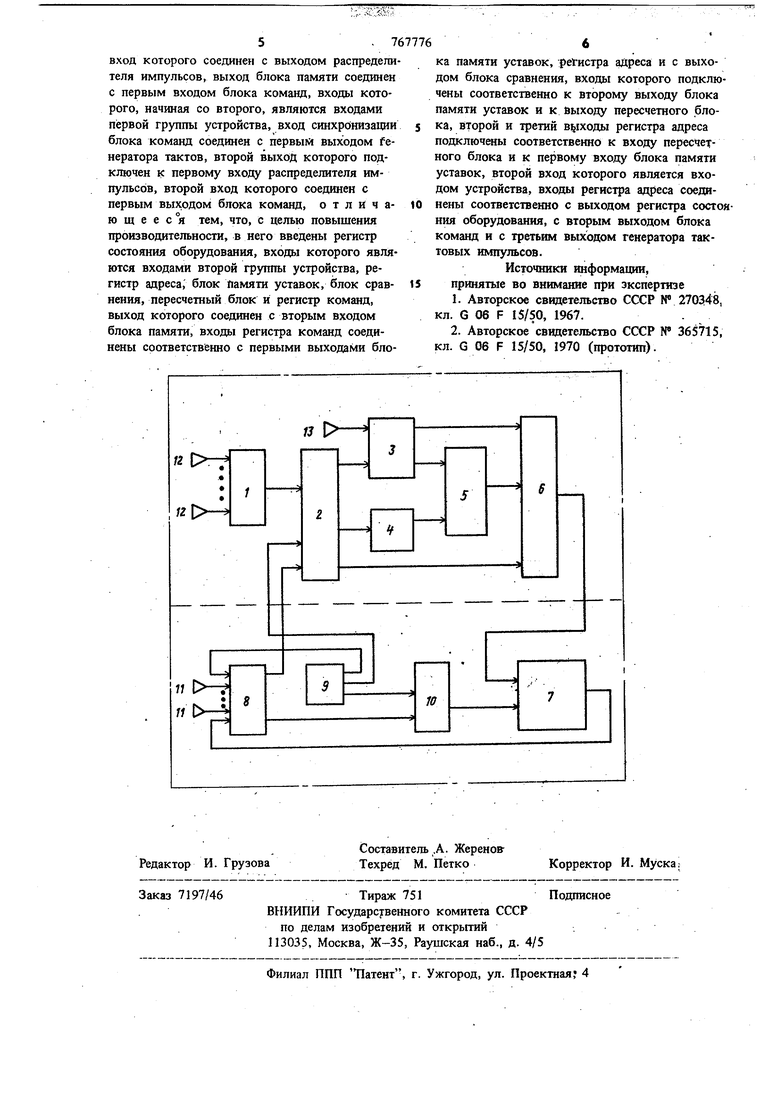
(54) УСТРОЙСТВО ДЛЯ АДРЕСОВАНИЯ ПОДВИЖНЫХ Изобретение относится к автоматике и вычислительной технике и может быть использовано на установках внутризаводского транспор та в машиностроении и других отраслях на предприятиях с крупносерийным и массовым типом производства для автоматизации адресования подвижных объектов при управлении грузопотоками высокой интенсивности. Известно устройство адресования, содержаще матрицу памяти, распределитель, командную и логические схемы, эл.емент вывода адресной информации, выход матрицы памяти через эле мент выхода адресной информации соединен с входом командной схемы и входом триггера выход которого подключен к питающей шине распределителя 1 . Устройство работает следующим образом. Оператор вводит в матрицу памяти адрес следования подвижного объекта. Распределител импульсов управляет продвижением информации, содержащейся в матрице памяти, но по ее регистрам, в соответствии с фактическим продвижением подвижного объекта по трассе, что фиксируется датчиками путевой автоматиОБЪЕКТОВки, сигналы которых через логическую и командную схемы поступают в распределитель. Недостаток этого устройства заключается в необходимости ручного ввода адреса каждого подвижного о&ьекта, что при высокой интенсивности грузопотоков приводит к снижению производительности транспортных систем ввиду органиченных функциональных возможностей оператора. Из известных устройств наиболее близким по технической сущности к изобретению является устройство для адресования подвижных объектов, содержащее матрицу памяти, входы которой соединены с выходами распределиТгеля, щина запуска которого соединена с первым выходом командного блока, два входа которого соединены с датчйкаг и положения объекта, а третий вход - с выходом генератора тактов, распределитель выполнен реверсивным, его щина реаверса подключена ко второму выходу командного блока, третий вход которого через элемент контроля продвижения информации соединен с выходом матрицы памяти- 2. 3 Это устройство работает аналогично предыду щему и, обеспечивая выполнение тех же функций, обладает более высоким быстродействием благодаря тому, что его распределитель импуль сов реверсивный. Недостатки этого устройства такие же, как и у предыдущего, так как выбор адреса следо вания подвижного объекта и ввод адреса в матрицу памяти осуществляется оператором вручную, что не позволяет повысить произврдительность систем внутризаводского транспорта, а это особенно важно в условиях высокой интенсивности грузопотоков. Цель изобретения - повышение производительности устройства. Поставленная цель достигается тем, что в устройство для адресования подвижных объек тов, содержащее блок памяти, первый вход которого соединен с выходом распределителя импульсов, выход блока памяти связан с первым входом блока команд, входы которого, начиная со второго, являются входами первой группы устройства, вход синхронизации блока команд соединен с первым выходом генератора тактов, второй выход которого подключен к первому входу распределителя импульсов, второй вход которого соединен с первым выходом блока команд, введены регистр состояния оборудований, входы которого являются входами второй группы устройства, регистр адреса, блок памяти уставок, блок сравнения, пересчетный .блок и регистр команд, выход которого соединен с вторым входом блока па мяти, ;вхбды регистра команд связаны соответ ственно о первыми выходами блока памяти уставок, регистра адреса и с выходом блока сравнения, входы которого подключены соответственно к второму выходу блока памйти ycTaiBoK ик выходу пересчетного блока. Второй и третий выходы регистра адреса подключены соответственно к входу пересчетного бло ка и к первому входу блока памяти уставок, второй вход которого является входом устройства, входы регистра адреса соединены соответственно с выходом регистра состояния оборудования, с вторым выходом блока команд и с третьим выходом генератора тактовы импульсов. Схема устройства представлена на чертеже. Она содержит регистр 1 состояния оборудования, регистр 2 адреса, блок 3 памяти уставо пересчетный блок 4, блок 5 сравнения, регист 6 команд, блок 7 памяти, блок 8 команд, генератор 9 тактов, распределитель 10 импуль сов, группы входов 11, 12 устройства, вход 13 устройства. Устройство работает следующим образом (работа устройства рассмотрена на примере конвейерной системы). С пульта ввода нормативных и плановых заданий (на чертеже не показан) по входу 13 в блок 3 памяти уставок вводятся щифры грузов и по каждому виду груза - установленная норма его содержания на конвейере. Эта информация н0 изменяется в течение всего планируемого периода. Текущее значение количества грузов, находящееся на конвейере, хранится в блоке 4. Значения счетчиков блока 4 изменяются при навеске грузов на конвейер и Снятии их с конвейера. Факты выполнения этих операций фиксируются датчиками путевой автоматики, подключенными к входам 11. По сигналам этих датчиков блок 8 команд формирует команду, содержащую код операций (+1) и номер счетчика. Эта команда по ступает в регистр 2 адреса, где определяется, Гк какому из счетчиков блока 4 относится данная команда, и осуществляется ее передача, т.е. реализуется для данного счетчика код операции (изменяется его состояние на единицу). Работа регистра 2 адреса синхронизируется генератором 9 тактов. Номера счетчиков в. блоке 4 соответствуют . номерам потребителей грузов. Состояние обуруДования потребителей фиксируется датчиками состояния оборудования, подключаемыми к входам 12. Информация от них поступает в регистр 1 состояния оборудования. Регистр 2 адреса, последовательно опрашивая каждый разряд регистра 1 состояния оборудования, определяет готовность потребителя принять груз. Если в момент опроса оборудование потребителя находится в рабочем состоянии, то для него отыскивается в блоке 4 текущее значение количества грузов требуемого вида, а в блоке 3 - значение установленной нормы по данному виду груза..Эти величины сравниваются в блоке 5. Если значение уставки окажется больщим, чем величина текущего значения грузов, то регистр 6 команд компонует команду, соединяя в ней адрес потребителя, поступивший из регистра 2 адреса, и шифр груза, поступивший из блока 3 памяти уставок. Эта команда записывается в блок 7 памяти, в котором при помощи распределителя 10 импульсов осуществляется слежение за движением грузов по конвейеру. При определении и формировании следующего адреса и выдаче команды указанный цикл работы повторяется. Использование изобретения обеспечит автоматический выбор и формирование адреса подвижных объектов, что приведет к повыщению производитеЯьности внутризаводских транспортных систем. Формула изобретения Устройство для адресования подвижных объектов, содержащее блок памяти, первый
вход которого соединен с выходом распределителя имнульсов, выход блока памяти соединен с первым входом блока команд, входы которого, начиная со второго, являются входами первой группы устройства, вход синхронизации блока команд соединен с первым выходом feнератора тактов, второй выход которого подключен к первому входу распределителя импульсов, второй вход которого соединен с первым выходом блока команд, о т л и ч аю щ е е с°я тем, что, с целью повышения производительности, в него введены регистр состояния оборудования, входы которого являются входами второй группы устройства, регистр адреса, блок памяти уставок, блок сравнения, пересчетный блок и регистр команд, выход которого соединен с вторым входом блока памяти, входы регистра команд соединены соответственно с первыми выходами блока памяти уставок, регистра адреса и с выходом блока сравнения, входы которого подключены соответственно к второму выходу блока памяти уставок и к выходу пересчетного блока, второй и третий вуходы регистра адреса подключены соответственно к входу пересчетного блока и к первому входу блока памяти уставок, второй вход которого является входом устройства, входы регистра адреса соеди0нены соответственно с выходом регистра состояния оборудования, с вторым выходом блока команд и с третьим выходом генератора тактовых импульсов.
Источники формации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 270348 кл. G 06 F 15/50, 1967.
2.Авторское свидетельство СССР N 365715 кл. G 06 F 15/50, 1970 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для адресования грузов установок непрерывного транспорта | 1978 |
|
SU716934A1 |
| УСТРОЙСТВО для АДРЕСОВАНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 1973 |
|
SU365715A1 |
| УСТРОЙСТВО для АДРЕСОВАНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ ПОДЪЕМНО-ТРАНСПОРТНЫХ И ШАХТНЫХ УСТАНОВОК | 1970 |
|
SU270348A1 |
| Устройство для адресования подвижных объектов | 1977 |
|
SU676987A2 |
| Устройство для адресования грузов | 1983 |
|
SU1130517A1 |
| Устройство защиты и автоматики распределительной подстанции | 1988 |
|
SU1584023A1 |
| УСТРОЙСТВО КОНТРОЛЯ ПАРАМЕТРОВ | 1996 |
|
RU2106679C1 |
| УСТРОЙСТВО КОНТРОЛЯ ПАРАМЕТРОВ | 2007 |
|
RU2331098C1 |
| Система автоматического контроля параметров электронных схем | 1989 |
|
SU1700538A1 |
| Устройство сопровождения и адресования объектов на конвейере | 1990 |
|
SU1813687A1 |
