Изобретейие относится к области бионики и вычислительной техники и может быть испол зовано. в качестве элемента нейронных сетей для моделирования биологических процессов, в устройствах распознавания образов, а также в качестве элемента, структур, предназначенных для рещения систем обыкновенных дифференциальных уравнений, систем алгебраических уравнений, задач исследования операции, краевых задач теории поля. Известна модель нейрона, содержащая И блоков изменения синаптйческих весов, первые входы которых являются входами устройства, выходы которых соединены со входами сумматора, схемы управления величиной порога пластического нейрона, блок сравнения уровня пластического нейрона, блок сравнения уровня ритмической активности и блок усиления 1 . К недостаткам известного решения относятся малая точность моделирования и ограниченные функциональные возможности. Наиболее близким техническим решением к изобретению является устройство для мбделн рования нейронов, содержащее И блоков изменения синаптйческих весов, первые входы которых являются входами устройства, и выходы соединены с входами iiiepBoro сумматора выходом подалюченного к первому входу первого цифрового интегратора, выход которого соединен с первым входом второго сумматора, выходом подключенного к второму входу второго цифрового интегратора, выход которого соеданен с первыми входами третьего и четвертого цифровых интеграторов; выход третьего цифрового интегратора является выходом устройства, выход четвертого цифрового интегратора подключен к второму входу второго сумматора, к третьему входу которого подсоединен выход пятого цифрового интегратора, первый вход которого и первый вход второго цифрового интегратора подключены к одному управляющему входу устройства; вторые входы И блоков изменения синаптйческих весов и вторые входы первого, третьего, четвертого и пятого цифровых интеграторов соедннень с другими управляющими входами устройства соответственно (2).
Процессы, происходящие в этом устройстве, описываются следующей системой уравнения:
Vi
iuo 1ь .- v-t -evv
Чл - )
где f значение Длительности временного
суммирования;
- - значение временной суммы, полученной в предыдущем шаге; A-t - приращение независимой переменной; i - вес пространственного суммирования; у. - синаптическйе веса; .j - входные воздействия;
- значение порога;.
К - значение веса выходной величины. Из уравнений (1) видно, что величина порога 0В зтом устройстве является заданной константой и не зависит от состояния нейроноподобного элемента в данный момент времени;
Кроме того, из системы (1) можно запи- : сать следующее равенстЬо:
(2)
1 bZ7r ;ii t--l:ibT; J.-j-1 J . Э J
Из выражения (2) следует, что нет необходимости иметь цифровой интегратор, в котором осуществляется умножение величины Vi . - , .
И на коэффициент Ь . Коэфj
фициент fb можно учесть при задании синаптических весов в блоках моделированных синаптическйх весов.
Недостатком устройства является невысокая точность моделирования.
Цель изобретения - увеличение точности моделирования и упрощение конструкции.
Указанная цель достигается тем, что в устройстве для моделирования нейрона, содержащем Y блоков изменения синаптическйх весой, первые входь которых являются входами устройства, а выходы п одключены к Л входам сумматора, первый цифровой интегратор, выход второго цифрового интегратора подключен к входам третьего и четвертого дафровых интеграторов, первые входы второго и пятого цифровых интеграторов - к одному управляющему входу устройства, вторые входы Y блоков изменения синаптических весов, третьего, четвертого и пятого цифровых интеграторов и первый вход первого цифрового интегратбра подключены к другим управляющим входам устройства соответ677884
. ственно, выхбды четвертого и пятого цифровых интеграторов подключены к () МУ и (Л +2)-му входам сумматора соответственно, выход которого соединен с третьим вхо5 дом второго цифрового интегратора, четвертый вход которого подключен к выходу первого цифрового интегратора, второй вход которого соединен с выходом третьего цифрового интегратора, второй вход второго цифро0 вого интегратора подключен к входу записи устройства.
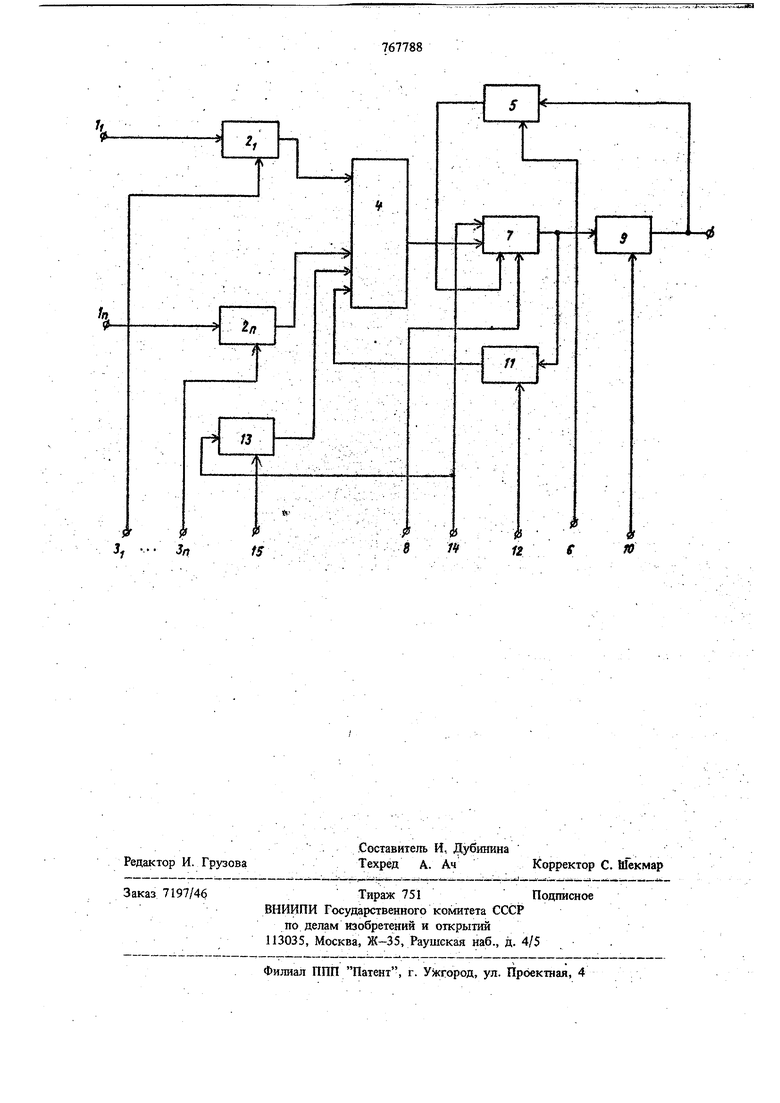
Структурная схема устройства для моделирования нейрона представлена на чертеже. Устройство содержит входы Ц-Ц, кажJ дый из которых может быть как возбуждающим, так и тормозящим; h блоков 2 -2у, изменения синаптическйх весов, выполненных . в виде цифровых интеграторов; управляющие: входы , подключенные к входам под- ынтегральных функций, слзокащих для записи начальных условий (вторые входы) цифровых интеграторов сумматор 4; первый цифровой интегратор 5, второй вход которого подключен к входу 6, управляющему изменением значения параметра рефракторности определяющего числа импульсов на входе устройства; второй цифровой интегратор 7, вторым входом подключенный к входу 8 записи, ; служащему для записи в регистр подынтегральной функции интегратора 7 максимального отрицательного числа для обеспечения рефракторности; третий цифровой интегратор 9, представляющий собой выходной блок, реализующий пороговый эффект, вход 10 которого подключен к второму входу Интегратора 9 и управляет изменением веса выходной величины; четвертый цифровой интегратор 11, второй вход которого подключен к входу 12, управляющему изменением длительности временного суммирования, которая определяет
одновременно и длительность периода рефракторносги; пятый цифровой интегратор 13, вход 14 которого подключен к входам переменных интегрирования (nepBbie входы) интеграторов ,7 и 13 и управляет изменением значения не зависимой переменной, а вход 15 соединен с вторым входом интегратора 13 и управляет изменением значения порога.
Длязадания.режима функционирования устройства на его управляющие входы , 6, 10, 12, 15, подключенные к входам регист- ров подынтегральных функций (служащие для записи начальных условий) цифровых интегратороа ,5, 9, 11 и 13 подаются соответствующие значения синаптическйх вебов, параметра рефракторности, веса вьтходной величины, параметра, определяющего длительность временного суммирования и порога, которые записываются и хранятся в регистрах подынг тегральных функций соответствующих интегра-; торов, после чего на вход 14 подаются значения приращений независимой переметок. С этого момента yctpoйcтвo готово к приему входных сигналов, поступающих с выходов других элементов, объединенных с данным элементом в нейроноподобную сеть, либо от датчиков информации, моделирующих рецепторных нейроны. Входные сигналы через входы Ц-1у, устройства поступают на входы Переменных интегрирования (первые входы) цифровых интеграторов 2j-2p jB которых умножаются на соответствующие значения синаптических весов, которые хранятся в регистрах подынтегральных функций этих блоков. Полученные произведения с выходов цифровых интеграторов 2.-2j поступают на первые Ц входов сумматора 4 на (И+2)-й вход которого с выхода интегратора 13 подается произведение значений порога и независимой переменной, причем значение порога хранится в регистре подынтегральной функции интегратора 13, а значение независимой перемешюй поступает со входа 14. В этот же момент времени значение результата времен ного суммирования, полученное на предыдущем шаге (на первом шаге оно равно нулю) и хран щееся в регистре подынтегральной функции интегратора 7, умножается в Нем на значение независимой переменной (задаваемоесо входа 14) и поступает на вход переменной интегрирования цифрового интегратора П, в котором дополнитель но умножается на значение длительности временно ,го суммирования (записанное в регистре поДын- тегральной функции интегратора 11) и подается на (И+О-й вход сумматора 4. Результат временного суммирования, полученный на данном шаге в сумматоре 4, поступает на вход прираще ния подынтегральной функции (третий вход) интегратора 7, в котором суммируется со значением временной суммы, полученной на предыдущем шаге. После суммирования значение времешюй суммы в следующем шаге умножается на прира1цение независимой переменной. Полученное проюведение с выхода интегратора 7 посту пает на вход переменной интегрирования интегратора 9, в котором умножается на значение веса выходной величины, хранящееся в регистре подынтегральной функции этого интегратора, и полученное произведение сравнивается с нулем. Если произведение отрицательное, сигнал на выходе устройства отсутствует. Если это произведение больше нуля, то на вь1ходе устройс1ва появляется выходной сигнал в виде последовательности импульсов, частота которых пропордаональна этому произведению. Число импульсов в этой последовательности определяется значением параметра рефракторности. 886 так как выход1гой сигнал, кроме того поступает на вход переменной интегрирования интегратора 5, в котором умножается на значение параметра рефракторности, хранящееся в регистре подынтегральной функции этого интегратора. После этого на выходе интегратора 5 появляется последовательность импульсов, частота следования которых пропорциональна полученному в этом интеграторе произведению. .Первый импульс на этой последовательности поступает на специальный управляющий вход (четвертый вход) интегратора 7. В момент прихода этого импульса на управляющий вход интегратора 7, вход приращения подынтеграль.- . ной функции (третий вход) этого интегратора закрывается, а вход для записи начальных значений подынтегральной функции (второй вход) открывается и в регистр подынтегральной функции интегратора 7 по специальному управляющему входу 8 записывается максимальное отрицательное число. В этот же момент времени сигнал на выходе устройства исчезает, так как теперь произведение, попучаемое в интеграторе 9, будет отрицательным. Таким образом, момент появления первого импульса на выходе интегратора 5 определяет момент появления последнего импульса в выходной импульсной паследовательностк устройства. Если теперь на входы устройства сигналы не поступают, то временной сумматор, включающий в себя интеграторы 7, 11 и сумматор 4, будет отрабатывать со скоростью, определяемой величиной длительности временного суммирования, это максимальное отрицательное значение до тех пор, пока оно не станет равным значению начального порога. Если же сигналы на Бхода 1 устройства продолжают поступать, то временной сумматор отрабатывает это значение до тех пор,пока оно не станет равным величине разности между суммарным входным воздействием и значением порога. Если значение этой разности положительное, то на выходе устройства опять появляется сигнал. Временной интервал между появлением двух . соседних вьтходных сигналов будет моделировать период рефракторности нейрона. Таким образом выходная характеристика модели нейрона на интервале времени значительно больщем, чем длительность временного с)гммирования, будет npeflctaBnHTb собой периодически появляющиеся импульсные последовательности (частота которых определяется величиной превышения суммарного воздействия значения порога), чередующиеся с периодами рефракторности, что очень близко к работе реального нейрона. В таком режиме иейроноподобный элемент работает в том случае, когда значение параметра рефракторности лежит в интервале
от нуля до единицы. Если значёние параметра рефракторности равно нулю, то согласно выражениям (1) и (2) алгоритм работы элементй описывается следующей системой управлений:
..
.выхИм -Ь-- ъл ),
из которой путем задания соответствующих значений параметров oi 1,1 и 7т. можно получить все режимы функционирования.
Таким образом, используемая новая совокупность отличительных признаков выгодно отличает устройство от прототипа, так как, вопервых, исключение цифрового интегратора, служащего для умножения суммарного входноИ
го сигнала Т1 TfV; ASI4 на коэффициент Г-1
fb , из известного устройство позволяет объединить первый и второй сумматоры в один сумматор и тем самым упростить его конструкцию; во-вторых, использование этого же ин. тегратора для моделирования периода рефракторности позволяет при том же количестве интеграторов повысить точность моделирования известного устройства.
Формула из о б рё т е н и я
Устройство для моделирования нейрона, содержащее У блоков изменения синаптичес677888. V
ких весов, первые входы которых являются входами устройства, а выходы соединены с П входами сумматора, первый цифровой интегратор, выход второго цифрового интегратора подключен к первым входам третьего н четвертого цифровых интеграторов, первые входы второго и пятого цифровых интеграторов соединены с одним управляющим входом устройства, вторые входы t блоков измене10 ния синаптических весов, третьего, четвертого и пятого цифровых интеграторов и первый вход первого цифрового интегратора подключены к другим управляющим входам устройства соответственно, выход третьего цифрового
15 интегратора является выходом устройства, о т л и ч а ю щ е е с я .тем, чт, с целью увеличения точности моделирования и упрощения конструкции, выходы четвертого и пятого цифровых интеграторов подключены к
20 (И+О-МУ и (11+2)-му входам-сумматора соответственно, выход которого соединен с третьим входом второго цифрового интегратора, четвертый вход которого подключен к выходу первого цифрового Ннтегратора, второй
25 вход которого соединен с выходом третьего цифрового интегратора, второй вход второго цифрового интегратора подключен к входу записи устройства.
Источники информации,
3Q принятые во внимание при экспертизе
1.Авторское свидетельство. СССР N° 211168, кл. G 06 G 7/60, 1966.
2.Авторское свидетельство СССР по заявке N 2490145/18-24, кл. G 06 G 7/60, 1977
jj (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования адаптивного нейрона | 1977 |
|
SU708369A1 |
| Устройство для моделирования нейрона | 1977 |
|
SU682910A1 |
| Устройство для моделирования адаптивного нейрона | 1977 |
|
SU736130A1 |
| Устройство для моделирования нейрона | 1988 |
|
SU1596356A2 |
| Устройство для моделирования нейрона | 1979 |
|
SU883927A2 |
| Модель адаптивного нейрона | 1978 |
|
SU765823A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ НЕЙРОНА | 1991 |
|
RU2029368C1 |
| Устройство для моделирования нейрона | 1987 |
|
SU1479944A1 |
| Устройство для моделирования нейрона | 1989 |
|
SU1709356A1 |
| Устройство для моделирования нейронных ансамблей | 1980 |
|
SU903910A1 |