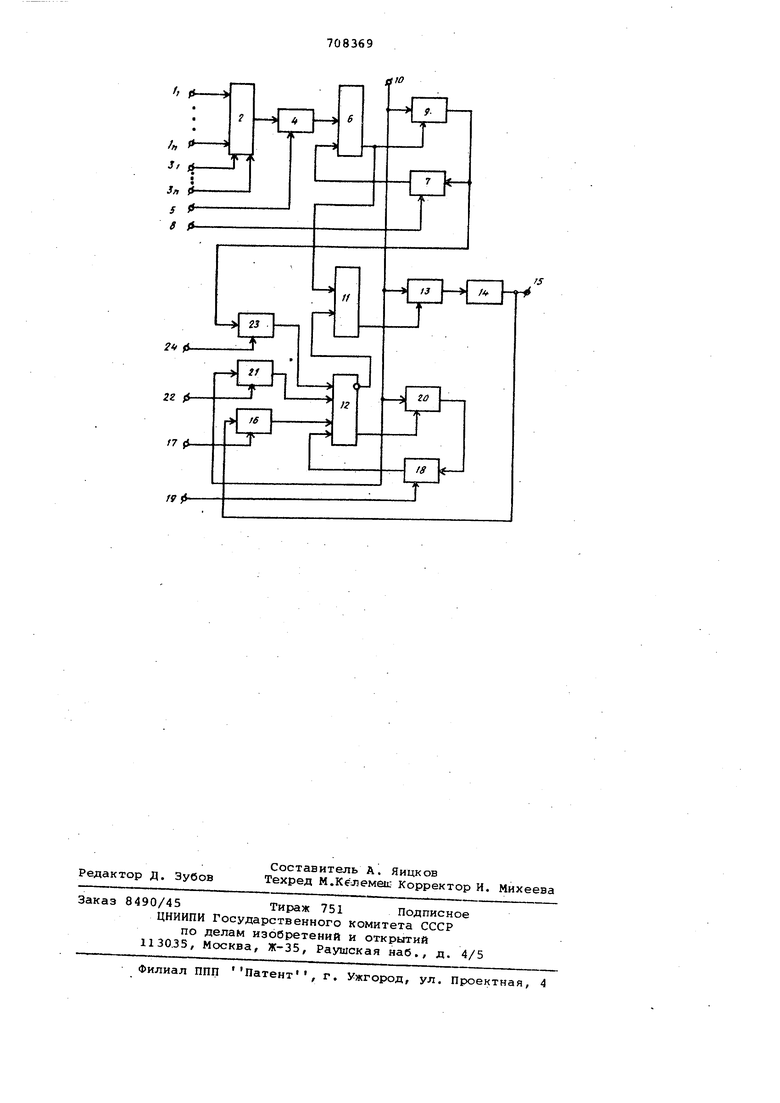
Изобретение относится к области бионики и вычислительной техники и может быть использовано в качестве элемента адаптивных нейро.нных. сетей для моделирования биологических процессов в устройствах распознавания образов. Известно устройство для моделирования адаптивного нейрона,содержащее блоки моделирования синапса,аддитивный сумматор, схему сравнения, преобразователь напряжения в частоту блок управления синапсом, формирователь выходных сигналов, блок формиро вания порога, блок управления,резистивным элементом, находящимся в блоке моделирования синапса, цепь адаптации по выходному сигналу,- содержащую первый интегратор, источник пита ния и цепь, моделирующую увеличение активности нейроноподобного элемента в зависимости от частоты его возбуждения, построенную на первом и втором интеграторах 11. Однако устройства, основанные на элементах аналоговой техники, имеют малую стабильность параметров. Наиболее близким техническим решением к предложенному изобретению является устройство для моделировани нейрона, содержащее блок суммирования синаптических весов, первые п входов которого являются входами устройства, выход блока суммирования синаптических весов соединенн с входом переменной интегрирования первого цифрового интегратора, выход которого подключен к первому входу первого сумматора, второй вход которого соединен с выходом второго цифрового интегратора, вход переменной интегрирования которого подключен к выходутретьего цифрового интегратора, вход подынтегральной функции которого подключен к выходу первого сумматора 2. Недостатком известного устройства является невозможность моделировать различные свойства адаптивных ней зонов. Цель изобретения - повышение точности моделирования. Указанная цель достигается тем, что в него введены второй и третий сумматор, цифровые интеграторы и блок сравнения, выход первого сумматора подключен к первому входу вто- . рого сумматора, выход которого соединен с входом подынтегральной функции четвертого цифрового интегратора, выход которого подключен к входу. блока сравнения, выход которого является выходом устройства и соединен с входом переменной интегрирования ПЯТС5ГО цифрового интегратора, выход которого подключен к первому входу третьего сумматора, второй вход которого соединен с выходом шестого цифрового интегратора, вход переменной интегрирования которого соединен с выходом седьмого цифрового интегратора, вход подынтегральной функ ции которого подключен к прямому выходу третьего сумматора, инверсный выход которого соединен с вторым вхо дом второго сумматора, выход восьмого ЦИФРОВОГО) интегратора подключен к третьему входу третьего суглматора четвертый вход которого соединен с выходом девятого цифрового интегратора, вход перменной интегрирования которого подключен к выходу третьего цифрового интегратора, входы переманной интегрирования третьего, четвертого, седьмого и восьмого цифровых интеграторов подключены к одному управляющему входу устройства, вторые и входов блока суммирования синаптических весов и входы подынт.ег ральной функции первого, второго, литого, шестого, восьмого и дев-ятогр цифровых интеграторов соединены с другими управляющими входами устройс ва соответственно. Схема устройства представлена на чертеже, VcTpoflcTiBo содержит Я входов 1,, 1 , подклю.ченных к входу блока сум мирования синаптических весов 2, ко рый имеет специальные входы 3, ... 3 управляющие изменением синапти ческих весов, первый цифровой интег ратор 4, вход подынтегральной функции которого подключен к специально му входу 6, управляющему изменением беса пространственного суммирования первый сумматор 6; второй цифровой интегратор 7, вход подынтегральной функции которого подключен к специальному входу 8, управляющему изменением длительности временирто сум-, мирования; третий цифровой-интегратор 9, вход переменной интегрироваНИИ которого подключен к специальному входу 10, управляющему изменением длительности периода возбуждения; второй и третий сумматоры 11 и 12; четвертый цифровой интегратор 1 схему сравнения 14, выход которой является выходом 15 устройства; пя тый цифровой интегратор 16, вход подынтегральной функции которого под .ключей к специальному входу 17, управляющему изменением веса порогевой добавки при адаптации по выходу; шестой цифровой интегратор 18, вход -подынтегральной функции которо го подключен к специальному входу 1 управляющему изменением длительноети периода адаптации; седьмой цифровой интегратор 20; восьмой цифровой интегратор 21, вход подынтегральной функции которого подключен к специальному входу 22, управляющему изменением порога; девятый цифровой интегратор 23, вход подынтегральной: функции которого подключен к специальноJMy входу 24, управляющему изменением веса пороговой добавки при адаптации по входу, Для задания режима функционирования устройства на специальные входы 3, ... 3 j весового сумматора, а также на специальные входы 5, 8, 17, 19, 22 и 24, подключенные к входам регистров подынтегральных функций цифровых интеграторов 4, 7, 16, 18, 21 и 23i подаются соответствующие значения синаптических весов, веса пространственного суммирования, длительности временного суммирования, веса пороговой добавки при адаптации по выходу, длительности периода адаптации, порога и веса пороговой добавки при адаптации по входу. После этого на специальный вход 10 подаются значения длительности периода возбуждения, причем.если задать значение веса пороговой добавки при адаптации по входу равным нулю, то данное устройство будет являться моделью нейрона адаптивного по выходу. Если задать равным нулю значение веса пороговой добавки при адаптации по выходу, то данное устройство будет представлять собой модель нейрона адаптивного по входу. Если оба указанных параметра отличны от нуля, то устройство является моделью нейрона адаптивного и по входу, и по выходу. При равенстве нулю обоих указанных параметров устройство работает в режиме неадаптивного нейрона. С момента подачи на специальный вход 10 значений длительности периода возбуждения устройство готово к приему входных сигналов, поступающих с выходов других устройству объединенных с данным в нейропрдобную сеть, либо от датчиков информации, моделирующих рецепторные нейроны. Входные сигналы через входы 1 . .. 1 f., поступссют на входы весового сумматора 2, в котором эти сигналы суммируются с учетом заданного для каждого входа синаптического веса. Полученная сумма с выхода сумматора 2 поступает на вход переменной интегрирования интегратора 4, в котором эта сумма умножается на соответствующее значение веса пространственного суммирования, записанное в регистре подынтегральной функции этого интегратора, и передается на первый вход сумматора 6. В этот же момент времени значение результата временного суммирования, полученное на предыдущем шаге (на .первом шаге оно равно нулю) и хранящееся в регистре подынтегральной функции интегратора 9, умножается в нем на значение.длительности периода возбуждения (подаваемое с специального входа 10) и поступает на вход пе- g ременной интегрирования интегратора 7, в котором дополнительно умножается на значение длительности временного суммирования (записанное в регистре подынтегральной функции Q интегратора 7) и подается на второй вход сумматора б. Значение результата временного суммирования, полученное на предыдущем шаге и умноженное в интеграторе 9 на значение длительности периода возбуждения в данном шаге, поступает, кроме того, на вход переменной интегрирования интегратора 23, в котором умножается на значение веса пороговой добавки при адаптации по входу и получен- 20 ное произведение подается на четвертый вход сумматора 12, на третий вход которого с выхода интегратора 21 поступает произведение значений порога (хранящееся в регистре подын- 25 тегральной функции интегратора 21) и длительности периода возбуждения (подаваемое с специального входа 10). В этот же момент времени текущее значение порога, полученное на пре- ЗО дыдущем шаге (на первом шаге оно равно нулю) и хранящееся в регистре подынтегральной функции интегратора 20 умножается в нем на значение длительности периода-возбуждения (задаваемое со специального входа 10) и поступает на вход переменной интегрирования интегратора 18, в котором дополнительно умножается на значение длительности периода адаптации (хранящееся в регистре 0 подынтегральной функции этого интегг ратора) и передается на второй вход сумматора 12. Одновременно с сигналами, пришедшими на второй и третий, и че- вертый входы сумматора 12, на 45 его первый вход с выхода интегратора 16 поступает значение пороговой добавки при адаптации по выходу, полученное в интеграторе 16 в результате умножения выходной величины (пос- 50 тупающее на вход переменной интегрирования этого интегратора с выхода 15 модели) на значение веса пороговой добавки при адаптации по выходу (хранящееся в регистре подынтеграль- re ной функции интегратора 16). Результаты суммирования, полученные в сумматорах 6 и 12, поступают на первый и второй входы сумматора 11, в котором они дополнительно суммируются, и полученная сумма передается на вход подынтегральной функции интегратора 13. В интеграторе 13, поступившая сумма умножается на значение длительности периода возбуждения.и полученное произведение поступает на вход 65 сх нив ден ся вед вых «оп но 9 гд ным пол вых опи нос Ес ным ад вет ных ы сравнения 14, в которой срав ется с нулем. Если это произвее больше нуля, то оно появляета выходе 15 модели. Если произние отрицательное, то cHrHaji на де 15 модели отсутствует. роцессы, происходящие в модели, ываются следующей системой разных уравнений: -Vu-o - P-i -i - a®ti-0 -b-® b Ci-o l wxi)(Hi-),C i-©il -b} At - длительность периода возбуждения;fj-- - синаптический вес J-ro , входа; У-- - входные воздействия, поступающие на л-м шаге; ct значение длительности временного суммирования; V) . - значение временной суммы, полученное на предыдущем р. - значение веса пространственного суммирования; о(.2 значение длительности периода адаптации; 0,- ,- текущее значение порога, полученное на предыдущем 0 - постоянное значение порога; (2 значение весапороговой добавки при адаптации по входу; jb - значение веса пороговбй добавки при адаптации по выходу ; - - значение выходной величины в 1-м шаге. сли в системе (1) принять 0д равнулю, то как уже указывалось выше,, чим модель нейрона адаптивного по ду, так как в этом случае, модель ывается следующей системой разных уравнений: , ,C-iH)P iPii с -0.2.0(-)- ЭЛ.,S В, . tAM).r®W в системе (1) принять равнулю, то получим модель нейрона тивного по входу, которой сооттвует следующая система разност уравнений:
rVu-i)iP.
®r- 2®Ci-1)
выхС1н-) -НоЬ-в| М .
Полагая РзРавным нулю, 5 равным нулю, оС-а равным .единице,с. равным единице и д-t равным единице, решение системы (1) примет следуюисий вид;
.r(b.(),
cVrVH-T jo при Z 0
где
1 при Z 0,
что,как известно,совпадает с алгоритмом работы формального нейрона.
Если (Ьдравно нулю, ft равно нулю, cL равно нулю, oiy pSiBHo единице и A-t равно единице, то решение системы (1) примет следующий вид:
Выхи-1).,-9,.
что совпадает с алгоритмом работы нейрона, реализующего механизм временного суммирования. ИНЕЛМИ словами при задании соответствующих значений указанных параметров устройство может быть использовано для моделирования адаптивного по входу и выходу нейрона, адаптивного по входу нейрона, адаптивного по выходу нейрона, неадаптивного формального нейрона и неадаптивного нейрона-, реализующего механизм временного сумми--: рования.
Благодаря введению новых блоков и связей повысилась точность моделирования адаптивного нейрона.
Формула изобретения
Устройство для моделирования адаптивного нейрона, содержащее блок суммирования синаптических весов, первые О входов которого являются входами устройства, выход блока суммирования синаптических весов соединен с входом переменной интегрирования первого цифрового интегратора, выход которого подключен к первому входу первого сумматора, второй вход которого соединен с выходом второго цифрового интегратора, вход переменной интегрирования которого подключен к выхолу третьего цифрового интегратора, вход подынтегральной функции которого -подключен к выходу первого сумматора, отличающееся 5 тем, что, с целью повышения точности моделирования, в него введены второй и третий сумматор, цифровые интеграторы и блок сравнения, выход первого сумматора подключен к первому входу
Л второго сумматора, вьлход которого соединен с входом подынтегральной функции четвертого цифрового интегратора, выход которого подключен к входу блока сравнения, выход которого является выходом устройства и соединен с входом переменной интегрирования пятого цифрового интегратора, выход которого подключен к первому входу третьего сумматора, второй вход которого соединен с выхо0 дом шестого цифрового интегратора, вход переменной интегрирования которого соединен с выходом седьмого цифрового интегратора, вход подынтегральной функции которого подклю5 чен к прямому выходу третьего сутчматора, инверсный выход которого соединен с вторым входом второго сумматора , выход восьмого цифрового интегратора подключен к. третьему вхо5 ДУ сумматора, четвертый вход которого соединен с выходом девятого цифрового интегратора, вход переменной интегрирования которого подключен к выходу третьего цифрового интегратора, входы переменной интегрирования третьего, четвертого, седьмого и Ёосьмого цифровых интеграторов подключены к одному управляющему входу устройства, вторые Л/ выходов блока суммирования синаптических весов
0 и входы подынтегральной функции первого, второго, пятого, шестого, восьмого и девятого цифровых интеграторов соединены с другими управляющими входами устройства соответствен5 но.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 512478, кл, G 06 G 7/60, 1976. 02. Авторское свидетельство СССР
по заявке №2490145/18-24, кл. СОб G , 1976 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования адаптивного нейрона | 1977 |
|
SU736130A1 |
| Устройство для моделирования нейрона | 1977 |
|
SU682910A1 |
| Устройство для моделирования нейрона | 1978 |
|
SU767788A1 |
| Устройство для моделирования нейрона | 1988 |
|
SU1596356A2 |
| Устройство для моделирования нейрона | 1979 |
|
SU883927A2 |
| Модель адаптивного нейрона | 1978 |
|
SU765823A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ НЕЙРОНА | 1991 |
|
RU2029368C1 |
| Устройство для моделирования нейронных ансамблей | 1980 |
|
SU903910A1 |
| Устройство для моделирования нейрона | 1982 |
|
SU1075632A1 |
| Устройство для моделирования нейрона | 1987 |
|
SU1479944A1 |