1
Изобретение относится к измерительной технике, может быть использовано при определении координат узлов колебаний тела.
Известен способ визуального определения параметров колебаний тела, заключающийся в том, что наносят мерный клин на колеблющееся тело, находят видимые в процессе колебаний точки пересечения сторон клина и по положению точек определяют параметры колебаний тела 1.
Недостатком известного способа является невозможность определения положения узлов колебаний тела из-за конструктивных особенностей мерного клина.
Целью изобретения является возможность определения положения узлов колебаний тела.
Указанная цель достигается тем, что, клин выполняют равнобедренным, за видимые в процессе колебаний точки принимают точки пересечения боковых сторон клина с основанием, измеряют расстояние между этими точками и наименьшее и наибольщее расстояния от последних до концов клина и определяют положение узла, расчитывая расстояние от одной из этих точек до узла колебаний путем умножения наименьщего расстояния на отнощение расстояний между точками пересечения к разности наибольшего и наименьшего расстояний.
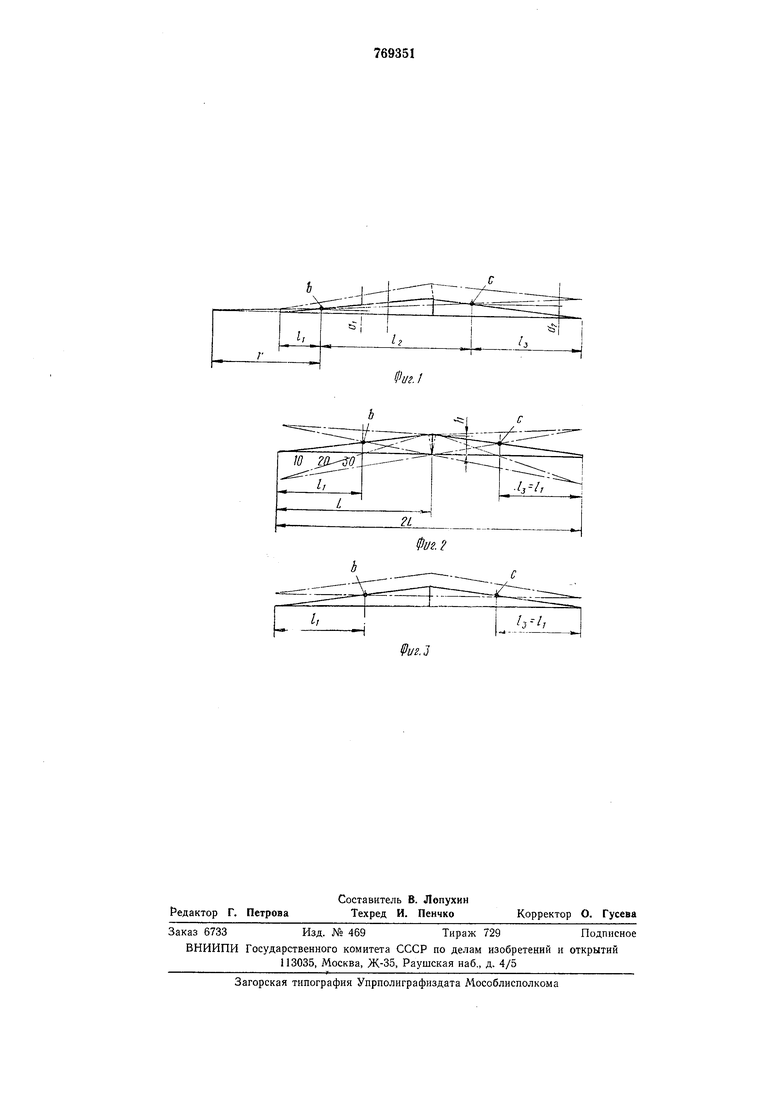
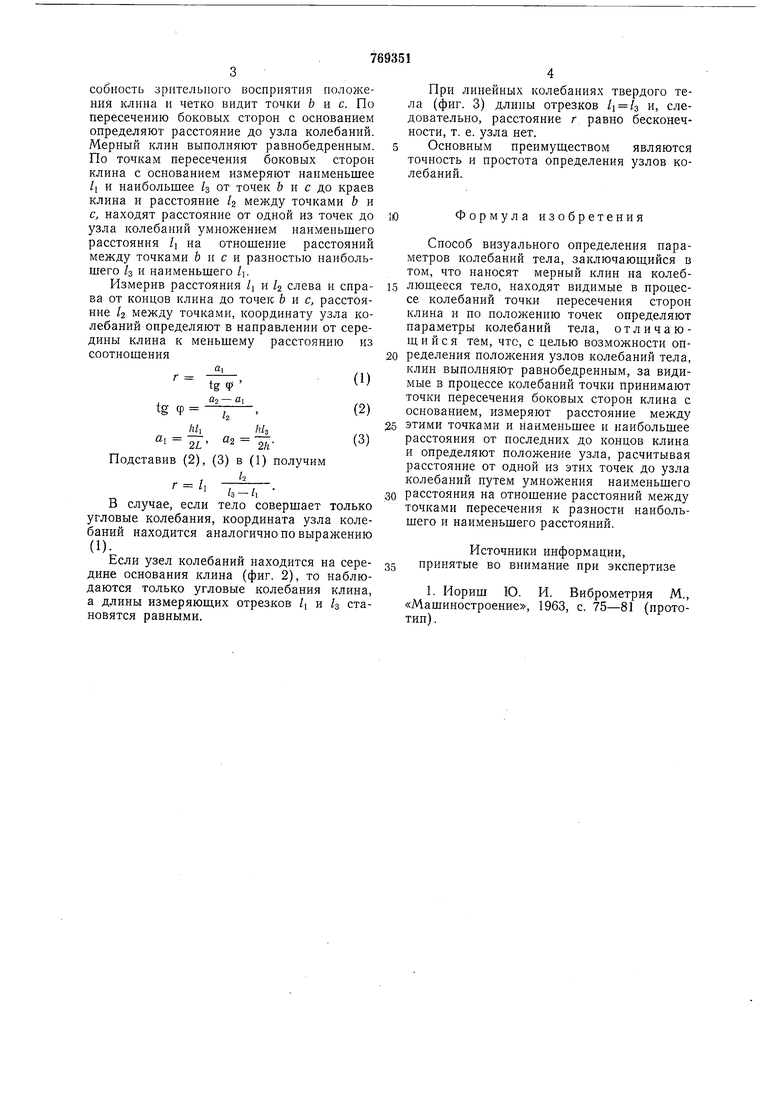
На фиг. 1 изображена расчетная графическая схема для определения положения узла колебаний тела, совершающего плоские линейные и угловые колебания; на 5 фиг. 2 - схема для случая, когда тело совершает угловые колебания; на фиг. 3 - схема для случая, когда тело совершает линейные колебания.
Способ может быть осуществлен с по10 мощью мерного клина, в котором:
г - расстояние от точки пересечения боковой стороны клина с основанием, соответствующей малому расстоянию до узла колебаний; 15 /, /3 - соответственно, меньшее и большее
расстояния;
/2 - расстояние между точками b и с; 2L - длина основания клина; Оь Й2--меньшая и большая амплитуды ко20лебаний в точках b и с;
h - высота клина.
Способ визуального определения узлов колебаний состоит в следующем.
Наносят мерный клин на вибирующее 25 тело, визуально ориентировав его основание преимущественно перпендикулярно направлению линейных колебаний. При сложном плоском линейном и вращательном колебательном движениях твердого тела с частотой 8 Гц и выше, глаз сохраняет способность зрительного восприятия положения клина и четко видит точки Ь и с. По пересечению боковых сторон с основанием определяют расстояние до узла колебаний. Мерный клин выполняют равнобедренным. По точкам пересечения боковых сторон клина с основанием измеряют наименьшее /1 и наибольшее /з от точек & и с до краев клина и расстояние 4 между точками b и с, находят расстояние от одной из точек до узла колебаний умножением наименьшего расстояния /1 на отношение расстояний между точками 6 н с и разностью наибольшего /3 и наименьшего /ь Измернв расстояния /i и /2 слева и справа от концов клина до точек, b и с, расстояние /2 между точками, координату узла колебаний определяют в направлении от середины клина к меньшему расстоянию из соотношения г ,(1) tg Ф ; hi, 2L 2hПодставив (2), (3) в (1) получим В случае, если тело совершает только угловые колебания, координата узла колебаний находится аналогично по выражению Если узел колебаний находится на середине основания клина (фиг. 2), то наблюдаются только угловые колебания клина, а длины измеряюш их отрезков /i и /з становятся равными. При линейных колебаниях твердого тела (фиг. 3) длины отрезков /1 /з и, следовательно, расстояние г равно бесконечности, т. е. узла нет. Основным преимуществом являются точность и простота определения узлов колебаний. Формула изобретения Способ визуального определения параметров колебаний тела, заключающийся в том, что наносят мерный клин на колеблющееся тело, находят видимые в процессе колебаний точки пересечения сторон клина и по положению точек определяют параметры колебаний тела, отличающийся тем, что, с пелью возможности определения положения узлов колебаний тела, клин выполняют равнобедренным, за видимые в процессе колебаний точки принимают точки пересечения боковых сторон клина с основанием, измеряют расстояние между этими точками и наименьшее и наибольшее расстояния от последних до концов клина и определяют положение узла, расчитывая расстояние от одной из этих точек до узла колебаиий нутем умножения наименьшего расстояния на отношение расстояний между точками пересечення к разности наибольшего и наименьшего расстояний. Источники информации, принятые во внимание при экспертизе 1. Иориш Ю. И. Виброметрия М., «Машиностроение, 1963, с. 75-81 (прототип).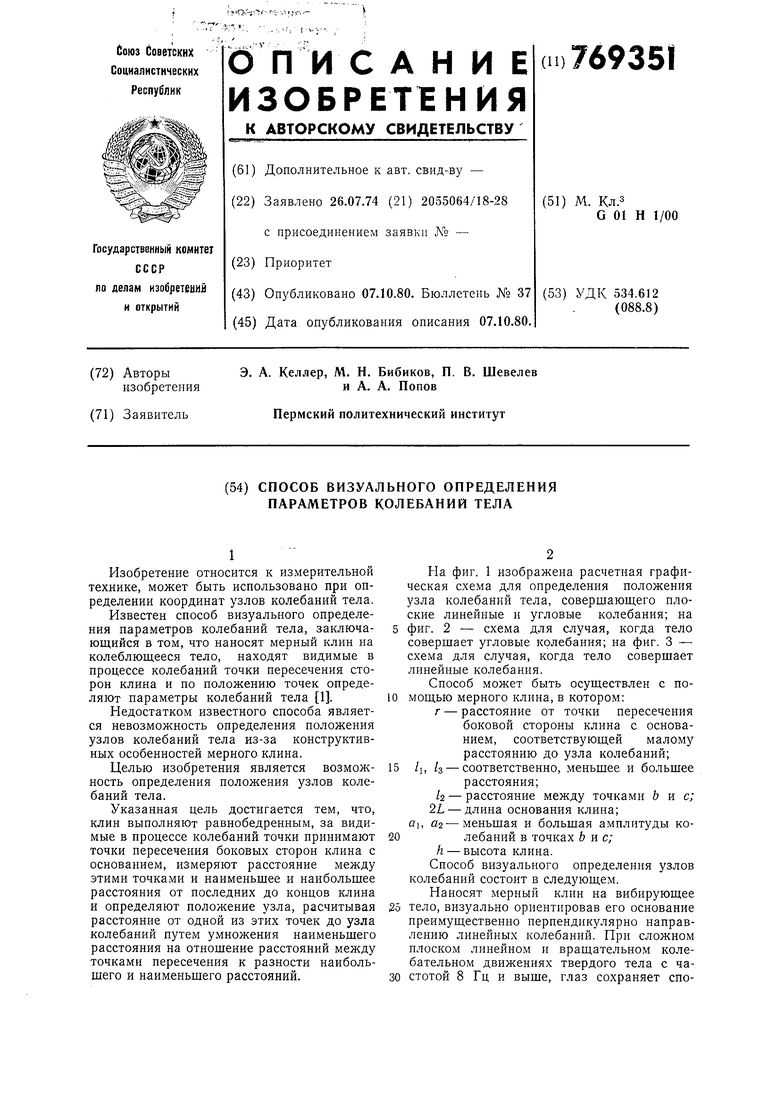
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения параметров обзорности рабочего места оператора транспортного средства или стационарной установки | 1982 |
|
SU1124192A1 |
| СПОСОБ ВОЗБУЖДЕНИЯ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ СИЛОВЫХ ФАКТОРОВ С ПРОГНОЗИРУЕМЫМИ ПАРАМЕТРАМИ | 2012 |
|
RU2528550C2 |
| Резьбовое соединение с заданным усилием затяжки и способ контроля усилия затяжки резьбового соединения | 1987 |
|
SU1530839A1 |
| СПОСОБ ПРОВЕДЕНИЯ СПЕКТРАЛЬНЫХ ТЕСТОВ МУЛЬТИПЛИКАТИВНОГО КОНГРУЭНТНОГО ГЕНЕРАТОРА СЛУЧАЙНЫХ ЧИСЕЛ | 2014 |
|
RU2589405C1 |
| ПРИБОР ДЛЯ ИЗМЕРЕНИЯ НАКЛОНЕНИЯ ВИДИМОГО МОРСКОГО ГОРИЗОНТА | 1941 |
|
SU64692A1 |
| УСТРОЙСТВО ДЛЯ РЕШЕНИЯ НАВИГАЦИОННЫХ ЗАДАЧ | 1990 |
|
RU2028667C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРБИТЫ КОСМИЧЕСКОГО АППАРАТА | 2019 |
|
RU2729339C1 |
| СПОСОБ ВИЗУАЛЬНОГО ИЗМЕРЕНИЯ АМПЛИТУД КОЛЕБАНИЙ | 1973 |
|
SU381915A1 |
| Способ оценки геометрических размеров дефектов стенки трубной секции и сварных швов по данным ультразвукового внутритрубного дефектоскопа с помощью поиска связанных индикаций | 2015 |
|
RU2607766C2 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ТОПОГРАФИИ ПОВЕРХНОСТИ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2208370C2 |