Изобретение относится к области автоматики и может быть И1анользовано для оптимального (ПО бьгстродействиюупрагвления объектом с передаточной функцией
()-Д.
где К - передаточный коэффициент.
Известно устройство для олтимального по быстродействию управления, содегржашее последовательно соединенные элемент сравнения, сумматор, релейный элемент и объект управления, выход которого соединен с одним из .входов элемента сравнения и входом дифференциатора, .причем выход/последнего связан со вторым входом сумматора через нелинейный преобразователь 1.
Однако это устройство не .позволяет .реализовать оптимальное по быстродействию движение объекта, если релейный элемент обладает запаздыванием.
Известно, также уст.ройст|во для- оптимального .по бы.стродейспвию управления 2. Но описанное устройство отличается сложностью жонструкщии и не может быть применено для оптимального .по быстродействию утрашления, если релейный элемент характеризуется временным запаздыванием.
Наиболее близким но технической сущности является устройство, содержащее яос5 ледовательно соединенные элемепт сра(Внения,, первый с мматар и релейный элемент, выход которого через объект ),правления соединен со входами дифференциатора и элемента сравнения, ко второму входу пер10 вого сумматора .подключен (выход нелиней.ного преобразователя.
Недостатком известного устройства является сложность конструкции, обусловленная разрывной характеристикой нелинейного .преобразователя, и низкая точность, которая определяется амллитудой автоколебаний в установивщемся режиме, равной 2 где t/Maxc , Т .соответственно лол20 ка и время запаздывания релейного элемента.
Целью изобретения является упрощение кон.струкции и по.вышение точности устройства. Устройство содержит последовательно
25 соединенные усилитель и «тарой сумматор, выьхо.д которого соединен со входом нелинейного .преобразователя, второй вход - с выходом дифференциатора, а вььчод релейного элемента соединен .со входом усили30 теля.
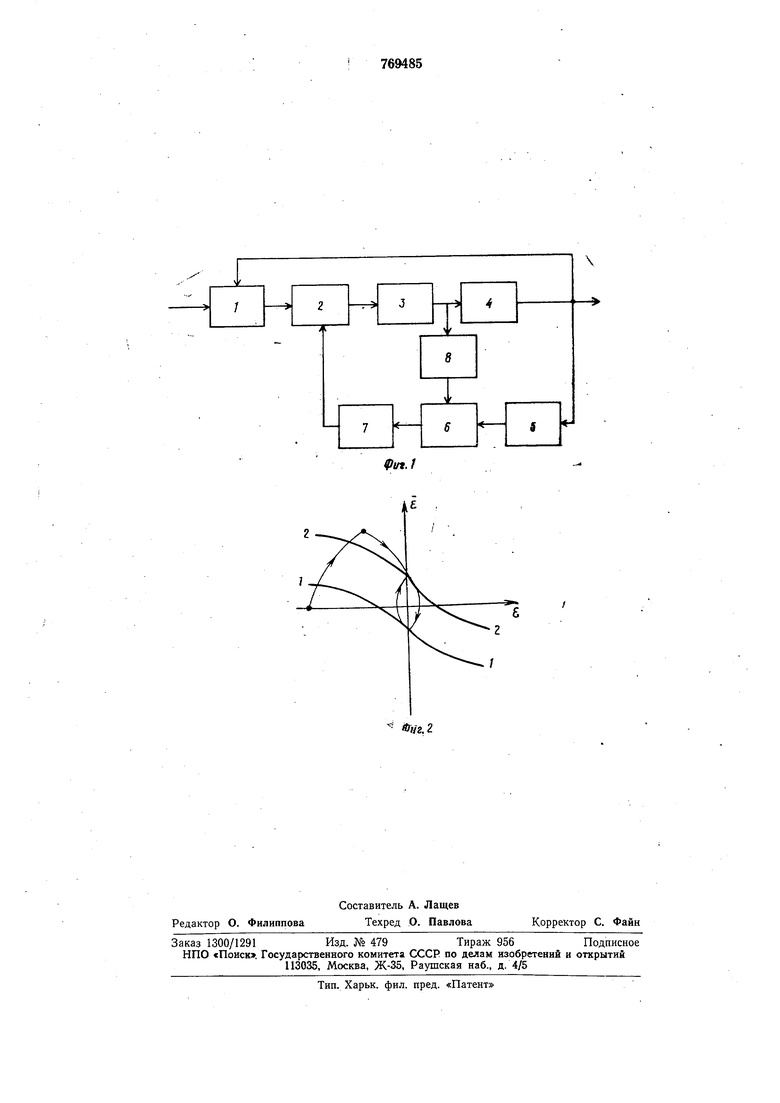
На фиг. представлена блок-схема предлагаемого устройства.
УстройствоСодержит элемент сравнения I, первый сумматор i2, релейный элемент 3, объект управления 4, дифференциатор 5, второй сум:мат,ор 6, нелинейный .прео бразователь 7 и масштабирующий усилитель 8; X - .выходной сигнал объекта; g - задающее Воздействие; е - сигнал ошибки; Z - входной сигнал нелидейного лреобразователя.,
Рассмотрим основные функции, выполняемые каждым из Структурных элементов устройства. Сравнивающее устройство 1 измеряет .сигнал ошибки е. Первый сумматор 2 осуществляет суммирование сигнала линейной обратной связи ло положению, поступающего с выхода элемента сравнения 1, и сигнала опережающей «елинейной обратной связи ло скорости, |который формируется дифференциатором 5, масштабирую: . щим усилителем 8, вторым сум-матором 6 и нелинейным преобразователем 7. Релейный элемент по выходной величине сумматора 2 вычисляет значение двужпозиционного сигнала олтимального уоцравления объектом 4.
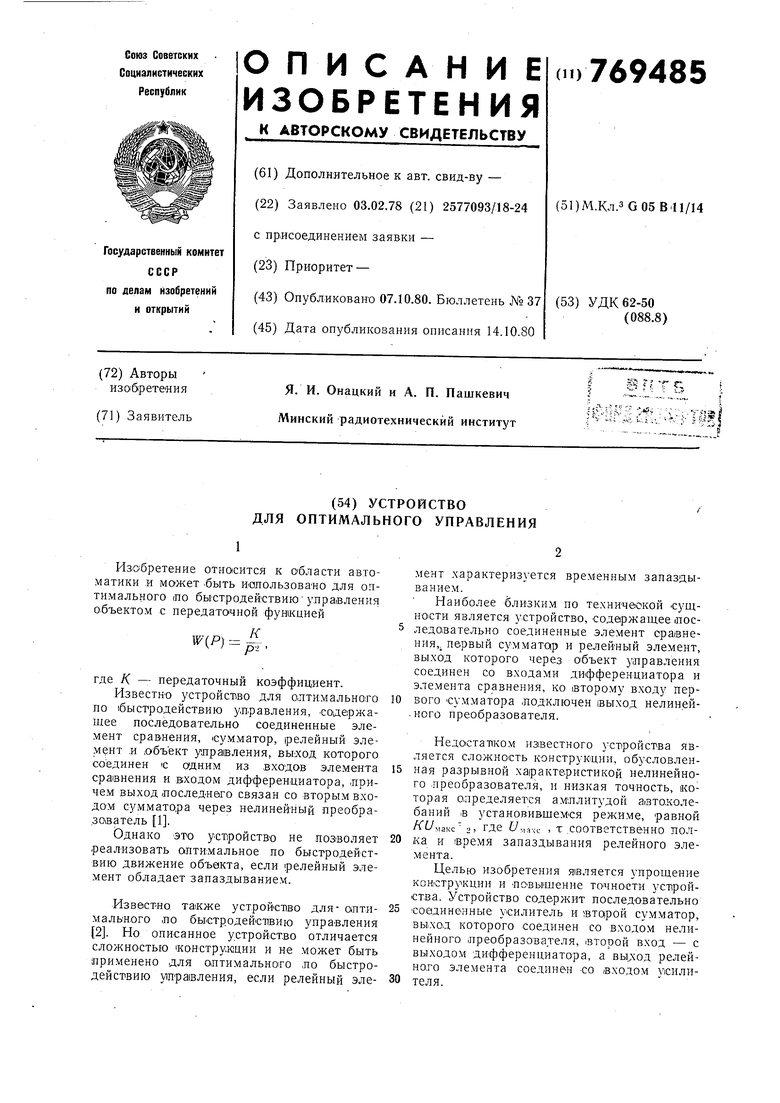
.Работа устройства (фиг. 2) основана на зависимости положения линии переключения на фазовой плоскости ее от значка выходной .величины релейного элемента 3. Лин-ия переключения описывается соотношением
Z|Z|
L-l,5ZTo,
2л-(;„
где Z е +0,5 .CL/максТо лри отри цательном значении выходного сигнала релейного элемента (кривая 1,1 фи.г. 2); и Z е - 0,i5 Xt/макс TO, |П1ри его положительном значении, кривая 2,2, фиг. 2). Вторые слагаемые в (выражениях для линии переключения и Z позволяют получить сигнал опережающей обратной связи ло скорости.
На первом интервале управления изображающая точка движется по одной из траекторий, лежащих левее l,il или правее 2,2, достигает линии (переключения и, спустя время То, лроисход.ит переключение релейного элемента 3. Дальнейшее дв-ижение точки (Происходит по одной из д|вух фазовых траактарий, образующих предельный цикл. Этим обеспечивается оптимальность по быстродействию.
iB автоколебательном режиме линия переклю чения лериодичеоки прыгает из положения 1,1 в 2,2 и обратно, удерживая изо-бражающую точ1ку на предельном .цикле. Ам.плитуда автоколебаний в таком устройстве ./Ci/макс , а характеристика нелинейно.го преобразователя описывается гладкой фувмцией
f(2:).5Zv
чумаке
Таким образом, иопользование в устройстве двух даполнительных элементов, сум:матора и маоштабирующ.его усилителя, позволило ;по.высйть его точно-сть и упростить его конструкцию. Это позволит упростить конструкцию и повысить класс точности автоматических компенсаторов, следящих систем с электромагнитными муфтами, улучшить .показатели качества систем
стабилизации летательных.аппаратов.
Как показал анализ, проведенный методом фазовой тлОСКости, и моделирование на аналоговой вычислительной машине
МН7М, устрой|ство оптимальным по «бысиродейсивию образом отрабатывает стуленчатые и линейно-изменяющиеся воздействия. .При этом точность обработки повышается Б Четыре раза.
Формула изобретения
Устройство для оптимального управления, содержащее .последовательно соединенные элемент сравнения, первый сумматор и релейный элемент, выход которого через объект управления соединен со входами дифференциатора и элемента сравнения, ко
втаро;му входу первого сумматора подключен (ВЫХОД нелинейного, преобразователя, отл ичающее с я тем, что, с целью повышения точности устройства, оно содержит последовательно соединенные усилитель и
второй сумматор, выход которого Соединен со входом, нелинейного .преобразователя, второй вход - с выходом дифференциатора, а выход релейного элемента соединен со входОМ усилителя.
.
Источни1ки информации, принятые во внимание при экспертизе:
1. Авторское свидетельс1 во СССР № .378799, кл. G 05 В , 1971.
2. Павлов А. А. Синтез релейных систем, оптимальных по |быстродействию. М., «Наука, 1966, с. 51-69 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2154295C1 |
| Оптимальная по быстродействию позиционная система управления | 1990 |
|
SU1734072A1 |
| Устройство для оптимального по быстродействию управления | 1973 |
|
SU447683A1 |
| Устройство для оптимального по быстродействию управления | 1973 |
|
SU442457A1 |
| Следящая система | 1980 |
|
SU941925A1 |
| Устройство для оптимального управления объектами второго порядка | 1982 |
|
SU1078404A1 |
| Регулятор | 1979 |
|
SU830299A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| Следящая система с люфтом | 1981 |
|
SU1012194A1 |
| Устройство компенсации нелинейности | 1986 |
|
SU1381420A1 |