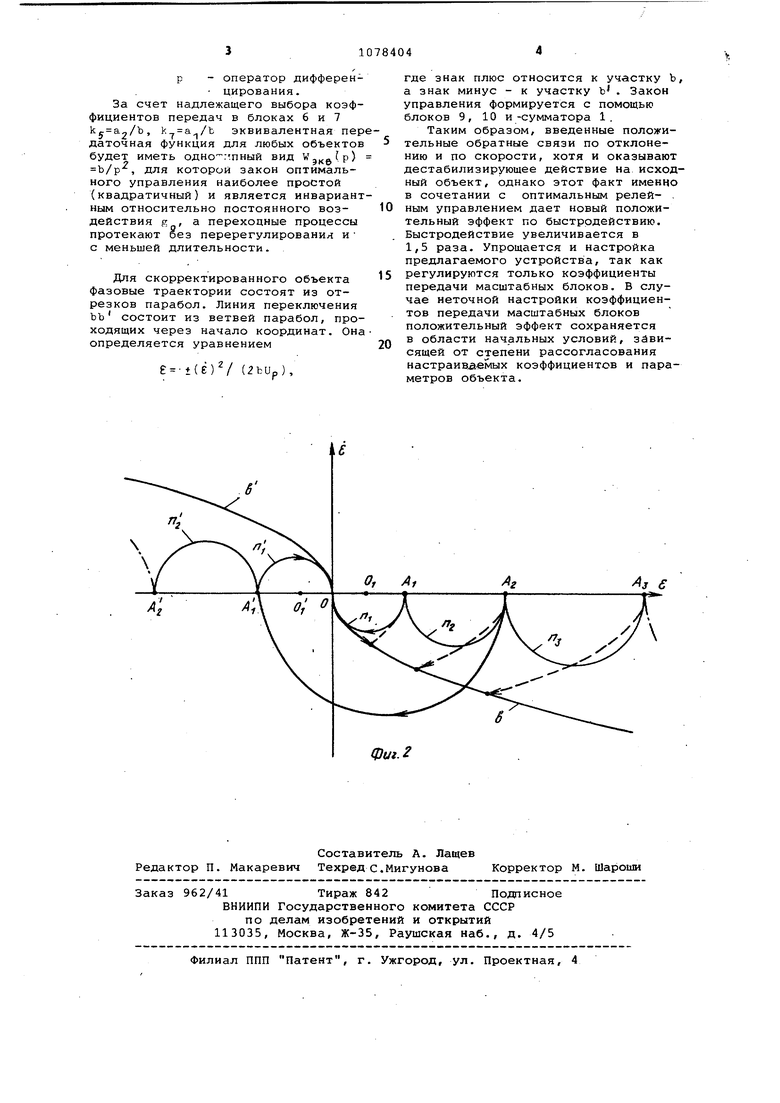
Изобретение относится к система автоматического управления, оптимальным по быстродействию, и може быть использовано в системах авто матического регулирования,- следящих системах, электроприводах и т.д., т.е. во всех случаях, когда Объект управления определяется любым нелинейным звеном второго порядка. Известны устройства для оптимал ного, по быстродействию управления, содержащие релейный элемент, элемент сравнения, дифференциатор и нелинейный преобразователь, реализующий оптимальный алгоритм переключения релейного элемента Г1 Недостатком данного устройства является сложность реализации и настройки, низкая точность управле ния. Наиболее близким по технической сущности к предлагаемому является устройство, содержащее элемент сравнения, релейный элемент, объек дифференциатор и нелинейный преобразователь, который состоит из электроннолучевой трубки, двух фо датчиков, включенных в мостовую (Схему и расположенных по разным сторонам светонепроницаемой ширмы, закрепленной с наружной стороны эк на и изогнутой по форме оптимальной линии переключения в виде охрезков (дуг) логарифмических спиралей. В переходном процессе луч трубки вычерчивает на экране фазовую траекторию, поэтому при пересе чении лучом перегородки происходит переключение релейного элемента,.чем и обеспечивается оптимальное по быстродействию управление C2J. Недостатком известного устройст ва является низкое быстродействие. Цель и-зобретения - повышение быстродействия в переходном процес се. Поставленная цель достигается тем, что в устройство, содержащее последовательно соединенные объект управления, первый сумматор, на второй вход которого подается задающий сигнал, и релейный элемент, выход объекта соединен с входом дифференциатора, дополнительно вво дятся первый масштабный блок, пос довательно соединенные второй масш табный блок и второй сумматор и последовательно соединенные третий масштабный блок, блок выделения мо дуля и умножитель, второй вход кото рого соединен с выходом третьего масштабного блока, а выход - с третьим входом первого сумматора, выход дифференциатора соединен с входом третьего масштабного блока и через последовательно соединенные первый масштабный .блок и второй сум матор - с входом объекта управления, вход дифференциатора - с входом второго масштабного блока, а третий вход второго сумматора соединен с выходом релейного элемента. На фиг. 1 изображена блок-схема устройства на фиг. 2 - фазовый портрет процессов управления. Устройство для оптимального управления содержит первый сумматор 1, релейный элемент 2, второй сумматор 3, объект 4 управления, дифференциатор 5, первый масштабный блок 6, второй масштабный блок 7, третий масштабный блок 8, умножитель 9, блок 10 выделения модуля. Выход объекта 4 соединен с вычитающим входом первого сумматора 1, выход которого соединен с входом релейного элемента 2. Выход объекта 4 соединен с входом дифференциатора 5, выход которого через последовательно соединенные третий масштабный блок, блок 10 выделения модуля и умножитель 9 - с третьим входом первого сумматора 1. Второй вход умножителя соединен с выходом третьего масштабного блока. Выход дифференциатора 5 через последовательно соединенные первый масштабный блок б, сумматор 3 соединен- с входом объекта. Вход дифференциатора 5 связан с входом второгомасштабного блока 7, выход которого соединен с вторым входом второго сумматора 3. Третий вход второго сумматора 3 соединен с выходом релейного элемента 2. На фиг. 2 показаны линии переключения п г 2 3 i; 2 3 ходного объекта и Ъ(Ь. скорректированного объекта. Сплошной линией изображена траектория исходного объекта и пунктирными линиями - траектория движения скорректированного объекта. Устройство работает следующим образом. Сигналы, поступающие с выхода объекта 4 на сумматор 3 через масштабный блок 7, а также через дифференциатор 5 и масштабный блок 6, образуют две положительные обратные связи - по отклонению и по скорости соответственно. В результате, передаточная функция объекта, которая в общем случае имеет вид б(Р приводится к следующей эквивалентной передаточной функции кеР р 2 +a r+a2-b( + k5.) где b, а , а - параметры исходного объекта;
р - оператор дифферен цирования.
За счет надлежащего выбора коэффициентов передач в блоках 6 и 7 ky a2/b, k- эквивалентная пердаточная функция для любых объектов будет иметь одно- г пный вид (p) b/p-, для которой закон оптимального управления наиболее простой (квадратичный) и является инвариантным относительно постоянного воздействия g , а переходные процессы протекают без перерегулироваиил и с меньшей длительности.
Для скорректированного объекта фазовые траектории состоят из отрезков парабол. Линия переключения ЪЪ состоит из ветвей парабол, проходящих через начало координат. Она определяется уравнением
e -±{e)V (2bUp),
где знак плюс относится к участку Ь а знак минус - к участку Ъ . Закон управления формируется с помощью блоков 9, 10 и-сумматора 1.
Таким образом, введенные положительные обратные связи по отклонению и по скорости, хотя и оказывают дестабилизирующее действие на исходный объект, однако этот факт именно в сочетании с оптимальным релей- , ным управлением дает новый положительный эффект по быстродействию. Быстродействие увеличивается в 1,5 раза. Упрощается и настройка предлагаемого устройства, так как регулируются только коэффициенты передачи масштабных блоков. В случае неточной настройки коэффициентов передачи масштабных блоков положительный эффект сохраняется в области начальных условий, зависящей от степени рассогласования настраиваемых коэффициентов и параметров объекта.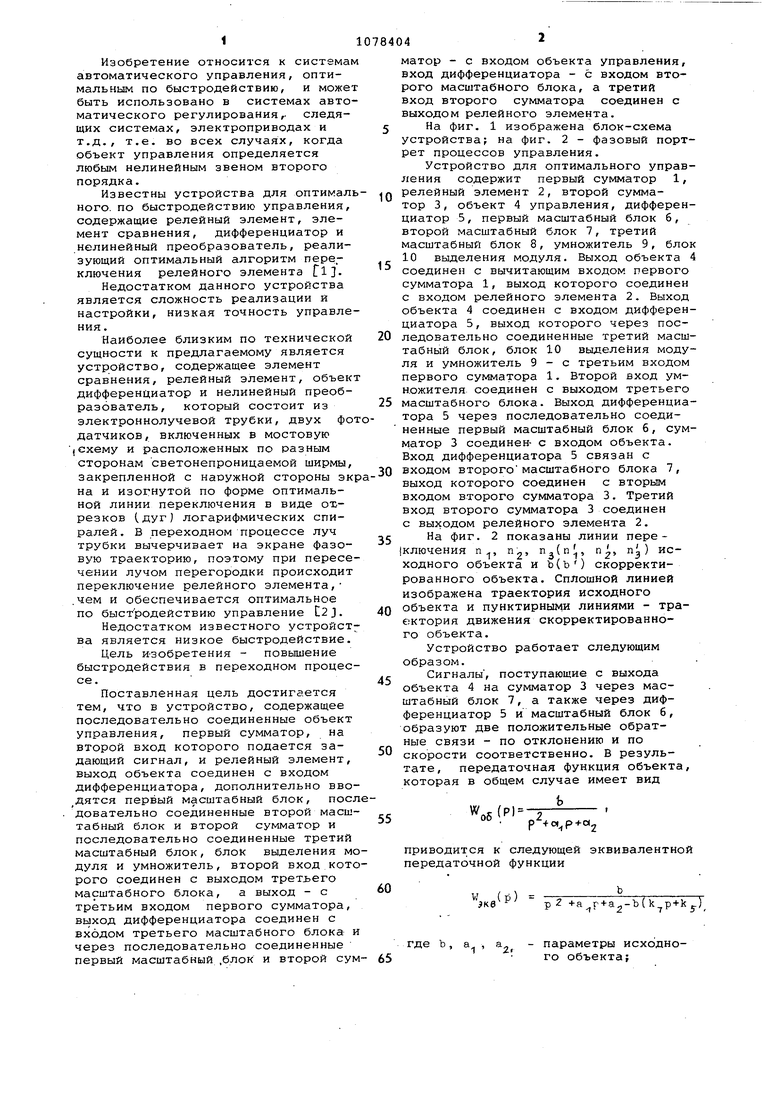
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор с ограничением управляющего воздействия | 1986 |
|
SU1383287A1 |
| Устройство для автоматического управления | 1980 |
|
SU868699A2 |
| Устройство для оптимального по быстродействию управления | 1973 |
|
SU447683A1 |
| Устройство для оптимального по быстродействию управления | 1973 |
|
SU442457A1 |
| Устройство для управления электроприводом | 1982 |
|
SU1061105A1 |
| Устройство для оптимального управления | 1978 |
|
SU769485A1 |
| Частотно-управляемый электропривод | 1989 |
|
SU1720138A1 |
| Оптимальная по быстродействию позиционная система управления | 1990 |
|
SU1734072A1 |
| Система оптимального управления объектами второго порядка | 1981 |
|
SU1094021A1 |
| Система автоматического регулирования | 1981 |
|
SU1029135A1 |
УСТРОЙСТВО ДЛЯ ОПТИМАЛЬНОГО УПРАВЛЕНИЯ ОБЪЕКТАМИ ВТОРОГО ПОРЯДКА, содержащее последовательно соединенные объект управления, первый суммат.ор и релейный элемент, выход объекта управления соединен с входом дифференциатора. отличающееся тем, что, с целью повышения быстродействия, введены первый масштабный блок, последовательно соединенные второй масштабный блок и второй сумматор и последовательно соединенный третий масштабный блок, блок выделения модуля и умножитель, второй вход которого соединен с- выходом третьего масштабного блока, а выход - с третьим входом первого сумматора, выход дифференциатора соединен с входом третьего масштабного блока и через последовательно соединенные первый масштабный блок и второй сумматор с входом объекта управления, вход дифференциатора - с S входом второго масштабного блока, (Л а третий вход второго сумматора соединен с выходом релейного элемента. о 00 4
Фиг. г
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО для СИНТЕЗА ОПТИМАЛЬНЫХ УПРАВЛЯЮЩИХ | 0 |
|
SU341013A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР 227436, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
