3
входу элемента ИЛИ И, второй вход которого соединен с выходом модулятора 4, а выход - со входом коммутатора 5.
Регулятор работает следующим образом.
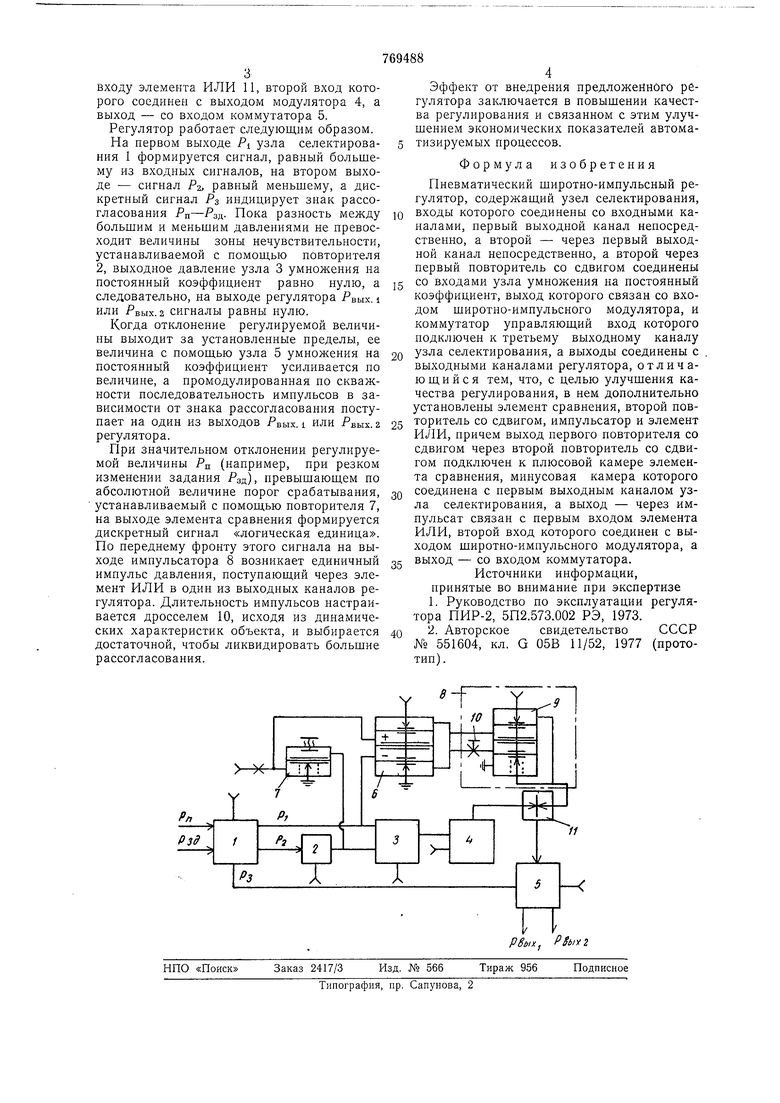
На первом выходе PI узла селектирования 1 формируется сигнал, равный большему из входных сигналов, на втором выходе - сигнал Р2 равный меньшему, а дискретный сигнал РЗ индицирует знак рассогласования РП-РЗД. Пока разность между большим и меньшим давлениями не иревосходит величины зоны нечувствительности, устанавливаемой с номош,ыо повторителя 2, выходное давление узла 3 умножения на постоянный коэффициент равно нулю, а следовательно, на выходе регулятора РВЫХ. i или Рвых.2 сигналы равны нулю.
Когда отклонение регулируемой величины выходит за установленные пределы, ее величина с помощью узла 5 умножения на постоянный коэффициент усиливается по величине, а промодулированная по скважности последовательность имиульсов в зависимости от знака рассогласования поступает на один из выходов Рвых. l или РВЫХ. 2
регулятора.
При значительном отклонении регулируемой величины РП (например, при резком изменении задания РЗД), превышающем по абсолютной величине порог срабатывания, устанавливаемый с помощью повторителя 7, на выходе элемента сравнения формируется дискретный сигнал «логическая единица. По переднему фронту этого сигнала на выходе импульсатора 8 возникает единичный имиульс давления, поступающий через элемент ИЛИ в один из выходных каналов регулятора. Длительность импульсов настраивается дросселем 10, исходя из динамических характеристик объекта, и выбирается достаточной, чтобы ликвидировать большие рассогласования.
Эффект от внедрения предложенного регулятора заключается в повышении качества регулирования и связанном с этим улучшением экономических показателей автоматизируемых процессов.
Формула изобретения
Пневматический широтно-импульсный регулятор, содержащий узел селектирования, входы которого соединены со входными каналами, первый выходной канал непосредственно, а второй - через первый выходной канал непосредственно, а второй через первый повторитель со сдвигом соединены со входами узла умножения на постоянный коэффициент, выход которого связан со входом широтно-импульсного модулятора, и коммутатор управляющий вход которого подключен к третьему выходному каналу узла селектирования, а выходы соединены с выходными каналами регулятора, отличающийся тем, что, с целью улучшения качества регулирования, в нем дополнительно установлены элемент сравнения, второй повторитель со сдвигом, импульсатор и элемент ИЛИ, причем выход первого повторителя со сдвигом через второй повторитель со сдвигом подключен к плюсовой камере элемента сравнения, минусовая камера которого соединена с первым выходным каналом узла селектирования, а выход - через импульсат связан с первым входом элемента ИЛИ, второй вход которого соединен с выходом широтно-имиульсного модулятора, а выход - со входом коммутатора. Источники информации, принятые во внимание при экспертизе
1.Руководство по эксплуатации регулятора ПИР-2, 5П2.573.002 РЭ, 1973.
2.Авторское свидетельство СССР JSfo 551604, кл. G 05В 11/52, 1977 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический импульсный регулятор | 1978 |
|
SU949633A1 |
| Пневматический широтно-импульсный регулятор | 1978 |
|
SU748344A1 |
| Пневматический широтно-импульсный регулятор | 1975 |
|
SU551604A1 |
| Пневматический импульсный регулятор | 1973 |
|
SU468221A1 |
| Пневматический широтно-импульсный модулятор | 1978 |
|
SU711581A1 |
| Пневматический регулятор с ограничением выходного сигнала | 1990 |
|
SU1791794A1 |
| Пневматический регулятор | 1978 |
|
SU752229A1 |
| Пневматический импульсный формирователь | 1977 |
|
SU651332A1 |
| Пневматический широтно-импульсный модулятор | 1978 |
|
SU699528A1 |
| Пневматический резервный регулятор | 1990 |
|
SU1734073A1 |
