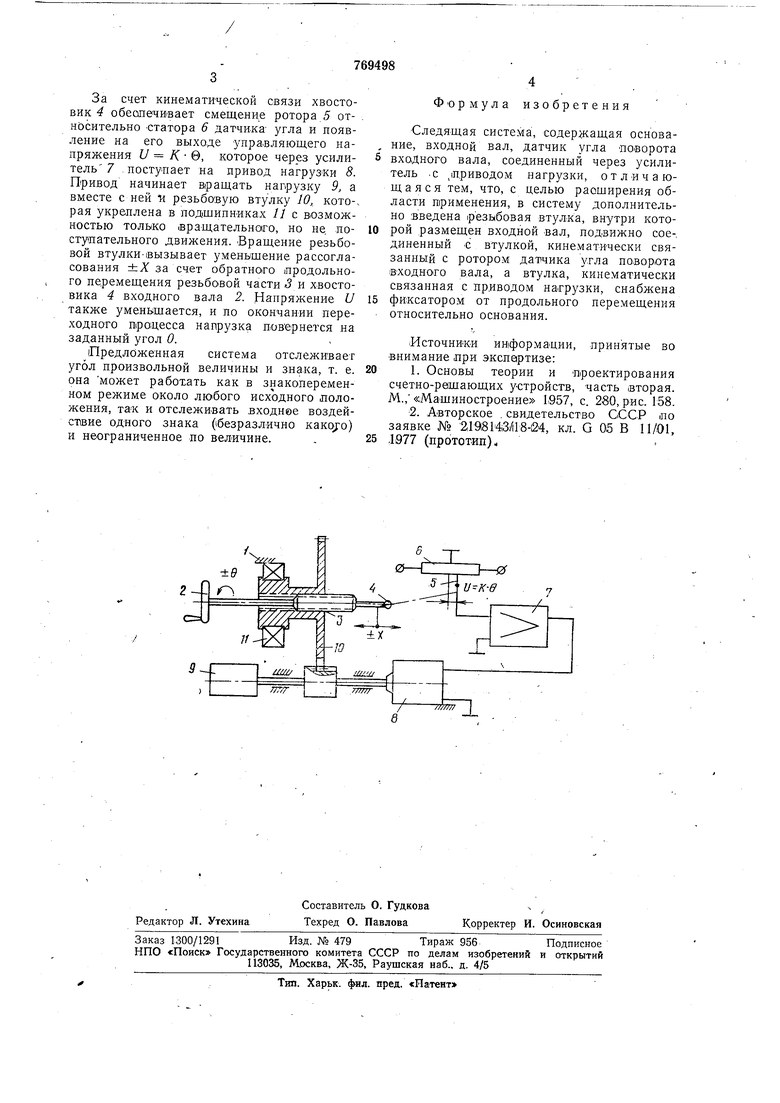
За счет кинематической связи хвостовик обеапечивает смещение ротора 5 относительно статора 6 датчика угла и появление на его выходе управляющего напряжения и К Q, которое через усилитель 7 .поступает на привод нагрузки 8. Привод начинает вращать напрузку 9, а вместе с ней и резьбовую втулку 10, которая укреплена в подшипниках // с возможностью только гвращательнаго, но не. поступательного движения. Вращение резьбовой втулки-вызывает уменьшение рассогласования ± за счет обратного лродольного перемещения резьбовой части «3 и хвостовика 4 входного вала 2. Напряжение U также уменьщается, и по окончании переходного процесса напрузка п.овернется на заданный угол 0.
Предложенная система отслеживает угол произвольной величины и знака, т. е. она может работать как в знакопеременном режиме около любого исходного лоложения, таК и отслеживать входнее воздействие одного знака (безразлично како/о) и неограниченное по величине.
Формула изобретения
Следящая система, содержащая основание, входной вал, датчик угла noiBOpoTa входного вала, соединенный через усилитель .с ,(Приводом нагрузки, отличающаяся тем, что, с целью раощирения области применения, в систему дополнительно введена резьбовая втулка, внутри которой размещен входной вал, подвижно соединенный € втулкой, кинематически связанный с ротором датчика угла поворота входного вала, а втулка, кинематически связанная с приводом нагрузки, снабжена фиксатором от продольного перемещения относительно основания.
Источники информации, принятые во внимание при зкспе(ртизе:
1. Основы теории и проектирования
счетно-рвщающих устройств, часть вторая.
М., «Машиностроение 1,957, с. 2SO, рис. 158.
2. Авторское свидетельство СССР ло
заявке № 2,198143 18-124, кл. G 05 В 11/01,
,1977 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| ПНЕВМОСТАРТЕР | 1997 |
|
RU2117779C1 |
| УСТРОЙСТВО ДЛЯ МЕХАНИЧЕСКОЙ ОБРАБОТКИ ИЗДЕЛИЙ СЛОЖНОЙ ПРОСТРАНСТВЕННОЙ ФОРМЫ | 2006 |
|
RU2353502C2 |
| МАЛОРАЗМЕРНЫЙ БЕСПИЛОТНЫЙ ВЕРТОЛЕТ БЕЗ АВТОМАТА ПЕРЕКОСА | 2023 |
|
RU2820276C1 |
| АДАПТИВНАЯ СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2239576C2 |
| РЕГУЛЯТОР РАСХОДА РАБОЧЕЙ СРЕДЫ ДЛЯ СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ | 2009 |
|
RU2409828C2 |
| Устройство для передачи угловых перемещений с усилением вращающего момента | 1981 |
|
SU989693A1 |
| ГИДРОПРИВОД ДИСКРЕТНОГО УГЛОВОГО ХОДА | 2012 |
|
RU2497027C1 |
| Следящая система для управления гелиостатом | 1981 |
|
SU964575A1 |
| РУЛЕВАЯ КОЛОНКА | 2019 |
|
RU2709056C1 |
| Установка для изучения режимов работы динамически настраиваемого гироскопа | 2024 |
|
RU2829671C1 |
Ь-йГ
