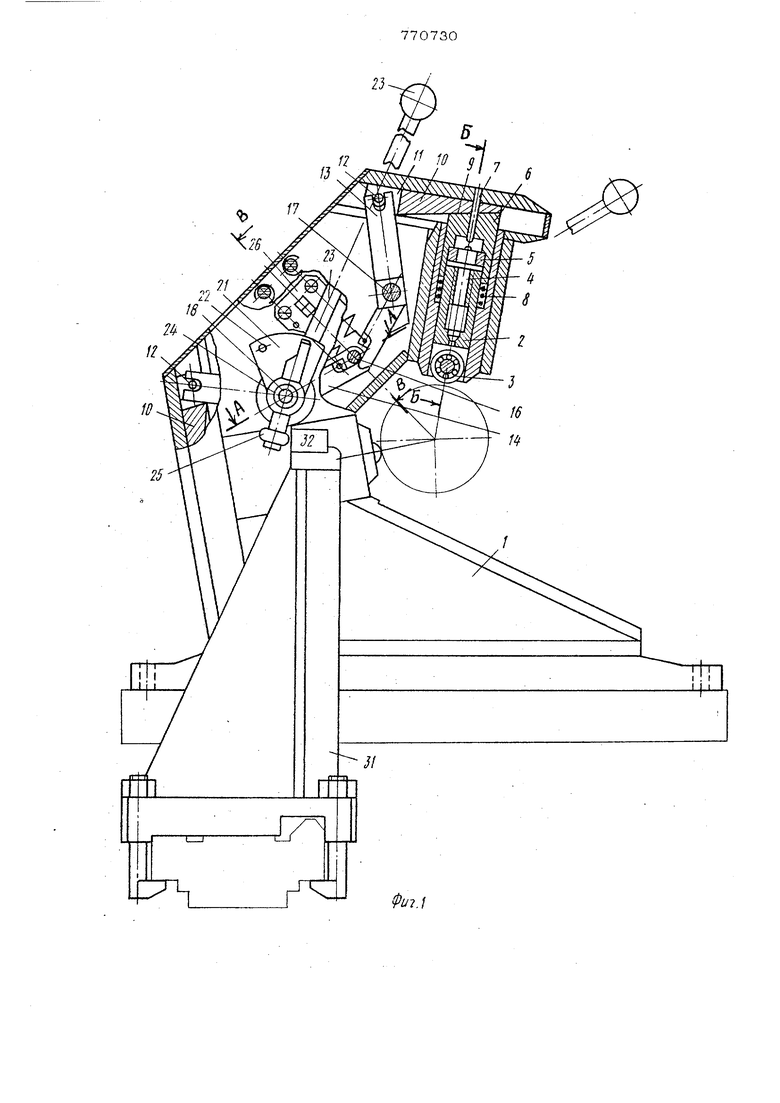
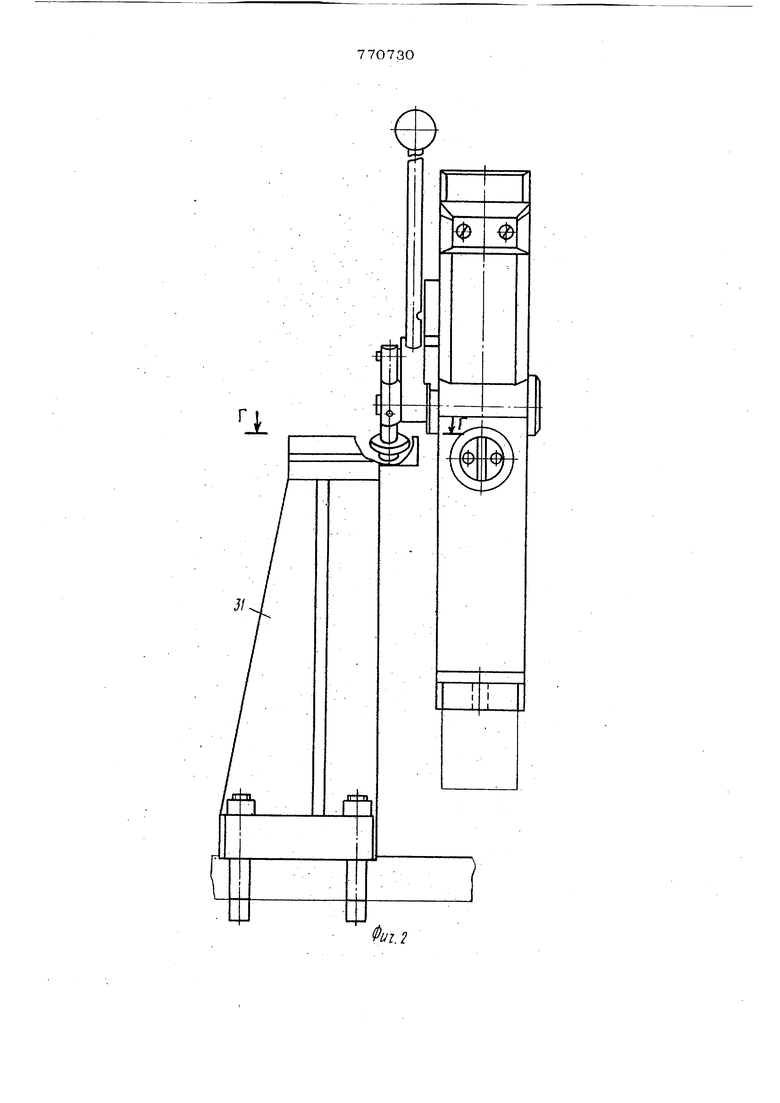
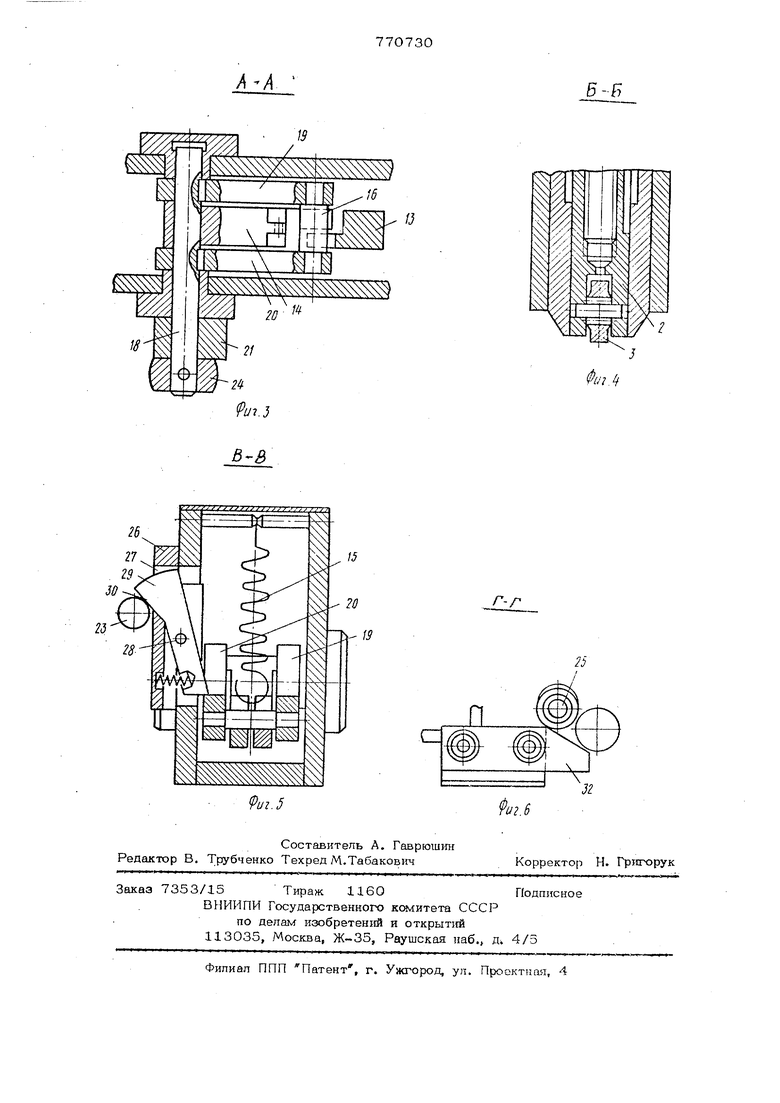
Изобретение относится к области стан костроения и может быть использовано при обработке конических изделий. Известны устройства подобного назначения, содержащие корпус, плунжеры с поддерживающими роликами и механизм перемещения плунжеров l. Недостатками известных устройств $тляюгся отсутствие возможности работы в автоматическом режиме и относ и те льгно низкие точность и производительность обработки, а также сложность конструкции. Цель изобретения - упрощение констру ции, повышение точности и производительности обработки, а также обеспечение .возможности работы в автоматическом режиме. С этой целью каждый плунжер подпружинен относительно корпуса и снабжен механизмом независимого радиального переметения,причем на плунжерах выполнены скосы, а в корпусе с возк-южностью гтеромещения установлены клинья и подпружзшенные рычаги, взаимодействующие с KmiHbso iK, контактируюш11ми со скосами плунжеров. На фиг. 1 изображен люнет, общий вия; на фиг. 2-то же, вид сбоку; на фиг.3разрез А-А« на фиг.1;на фкг.4-разрезБ-Б на фиг 1,на фиг. 5-разрез В-В на фиг. 1; на фиг. 6-разрез Г-Г на фиг. 2. Люнет содержит корпус 1, в котором расположены независимые один от другого плунжеры 2, на одном конце которых расположены ролики 3, а на другом - регулировочный элемент, например винты 4, удерживаемые от осевого перемещения гайками 5, расположенными в толкателях 6. Поворот винтов 4 производится через отверстия 7. Головки винтов 4 упираются в подпружиненные пружинами 8 толкатели 6, на конце которых выполнены скосы 9. По скосам 9 с толкателями 6 сопрягаются клинья 10, имеющие пазы 11 и неподвижные штифты 3 2 В этих пазах расположены соответственно вилкообразные концы двуплечих рычагов 13 и 14, пазы которых контактируют со штифтами 12. Оба двуплечих рыч&га 13 и 14, благодаря натяжению пружин 15, контакти}ууют с валиком 10. Рычаг 13 имеет возможность поворачиваться вокруг оси 1 7, а рычаг 14 - вокруг оси 18. На оси 18 жестко посажены рычаги 19 и 20, на которых с противоположной стороны закреплен валик 16. На оси 18 со свободой вращения расположен ректор 21 со штифтом 22. К сектору 21 прикреплена рукоятка 23. Рядом с сектором 21, на оси 18, жестко закреплен рычаг 24 со свободна вращающимся роликом 25. К корпусу 1 со стороны рукоятки 23 прикреплен кронштейн 26, в пазу 27 которого На оси 28 расположена подпру- жгашнная собачка 29 со скосом ЗО.
К направляющей токарного станка прикреплен кронштейн 31, в верхней части которого расположен копир 32, с которым может контактировать ролик 25.
4
Люнет работает следующим образом. Г коятку 23 с сектором 21, свободно СИД5ПЦНМ на оси 18, поворачивают до отказа на себя . При этом штифт 22, расположенный на секторе 21, воздействует на рычаг 24, жестко закрепленный на оси 18. При повороте рычаг 24 поворачивает ось 18, на которой жестко закреплены рычаги 19 и 2О, которые валиком 16 давят на концы двуплечих рыча. гов 13 и 14, подпружиненных пруж1шами 15, которые через штифты 12 перемещают клинья 10 от толкателей 6. Одновременно толкатели 6 под действием пружин 8 перемешаются от оси изделия, сопрягаясь по скосам 9 с клиньями. Вместе с толкателями 6 перемещаются независимые один от другого пттунжеры 2 с роликами 3 с помощью регулировочных винтов 4, удерживаемых гайками 5. В этом положении ролики 3 оказываются наиболее удаленными от оси шпинделя токарного станка. Таким образом, люнет устанавл1шается в исходное положение. После закрепления изделия рукоятку 23 переводят в крайнее положение от себя При этом рукоятка 23 надавливает на скос 30 собачки 29, которая освобождает рычаг 20 и валик 16 дает возможность двуплечим рычагам 13 и 14, на кониы которых действуют пружины 15, перемещаться от оси изделия. При этом противоположные концы двуплечих рычаГОВ 13 И 14 давят на штифты 12 и перемещают клинья 10 в сторону толкателей 6, которые скосами 9 надавливают на толкатели 6, пepQ 4eщaя их к изделию Толкатели 6 давят на головки винтов 4, а так как винты 4 сопряжены с плунжерами 2, то последние также перемещаются к оси изделия вместе с роликами 3. Ролики 3 входят в контакт с изделием, прижимаясь к последнему с некоторой силой, величина которой определяется усилием, развиваемым пружинами 15. Усилия развиваемые двумя пружинами 15 одинаковые, а следовательно одинаково и давление роликов 3 на изделие.
Рычаги 13 и 14 между собой не связаны, а следовательно каждый ролик 3 работает автономно.
По мере перемещения суппорта вдоль обрабатываемой конической детали и перехода люнета на меньший ее диаметр подпружиненные двуплечие рычаги 13 и 14 с помощью клиньев 10, толкателей 6 и плунжеров 2 постоянно поджимают ролики 3 к обрабатываемой детали,
По окончании обработки детали люнет роликом 25, расположенном на рычаге 24, находит на скос копира 32, установленного на кронштейне 31, и рычаг 24, поворачивая рычаги 19 и 20, приводит люнет в исходное положение.
Таким образом , люнет подготовлен . для обработки следующего изделия. Описанный цикл работы люнета может повторяться многократно.
Формула изобретения
Люнет для поддерживания конических изделий, содержащий корпус, плунжеры с поддерживающими роликами и механизм перемещения плунжеров, отличающийся тем, что, с целью упрощения конструкции,повышения точности и производительности обработки, а также обеспечения возможности работы в автоматическом режиме, каждый плунжер подпружинен относительно корпуса и снабжен механизмом независимого радиального перемещения, причем на плунжерах выполнены скосы, а в корпусе с возможностью перемещения установлены клинья и подпружиненные рычаги, взаимодействующие с кли ньями, контактирующими со скосами плун.жеров..
Источники информации, принятые во внимание при экспертизе
1, Авторское свидетельство СССР ;sfe 157872, кл. В 23 Q 1/24, I960.
а
j/
5-Г
| название | год | авторы | номер документа |
|---|---|---|---|
| Загрузочно-разгрузочное устройство к горизонтальному поворотному столу | 1984 |
|
SU1180226A1 |
| Самоцентрирующий люнет | 1982 |
|
SU1038169A1 |
| Клепальный пресс | 1980 |
|
SU1016031A1 |
| Замок | 1986 |
|
SU1395796A1 |
| Устройство для сборки крепежных элементов | 1987 |
|
SU1511103A1 |
| Гидрокопировальный суппорт | 1980 |
|
SU904997A1 |
| Механизм подачи пруткового материала | 1973 |
|
SU524607A1 |
| МАШИНА ДЛЯ КОНТРОЛЯ ГЕРМЕТИЧНОСТИ ТАРЫ | 1969 |
|
SU244677A1 |
| Устройство для автоматизированного ультразвукового контроля сварного шва | 1989 |
|
SU1663536A1 |
| НАСТОЛЬНЫЙ ПНЕВМОГИДРАВЛИЧЕСКИЙ ПРЕСС | 1971 |
|
SU320395A1 |
/J
