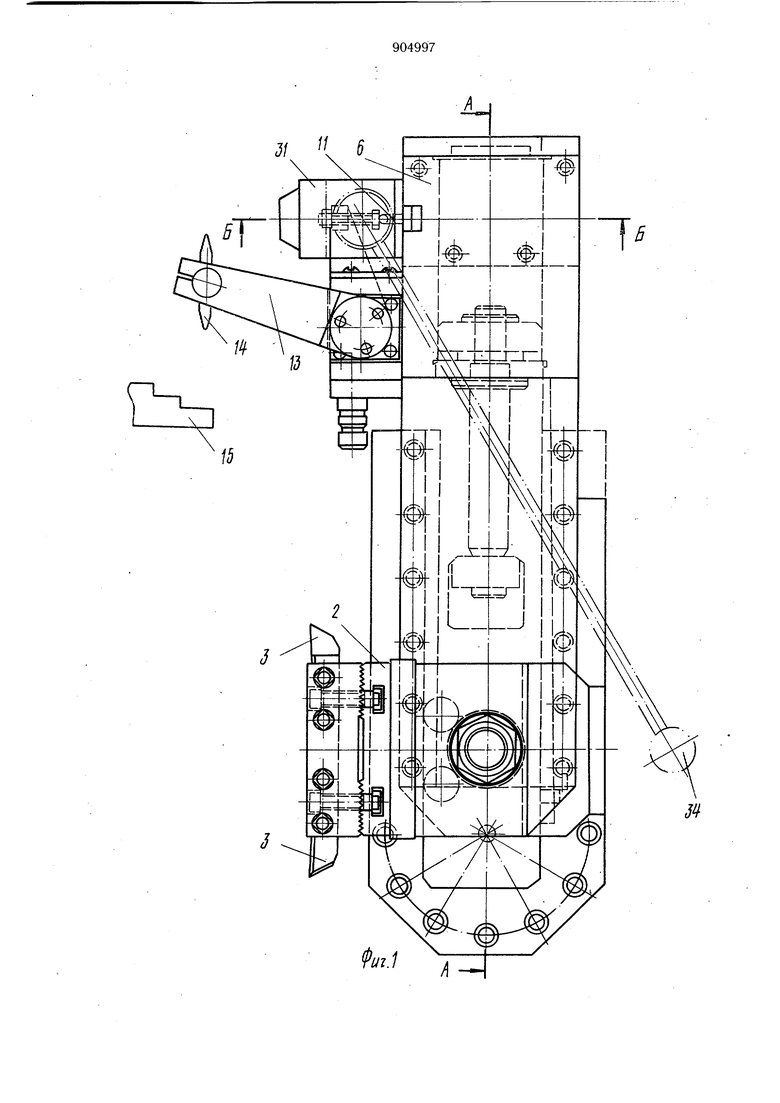
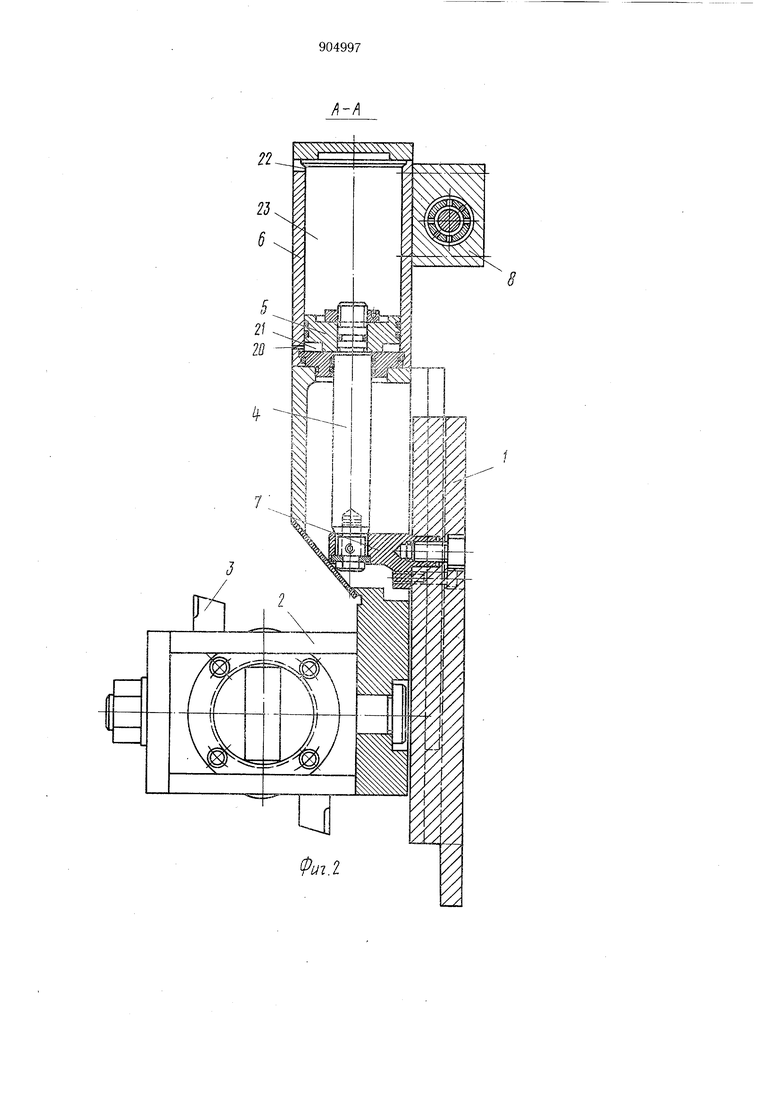
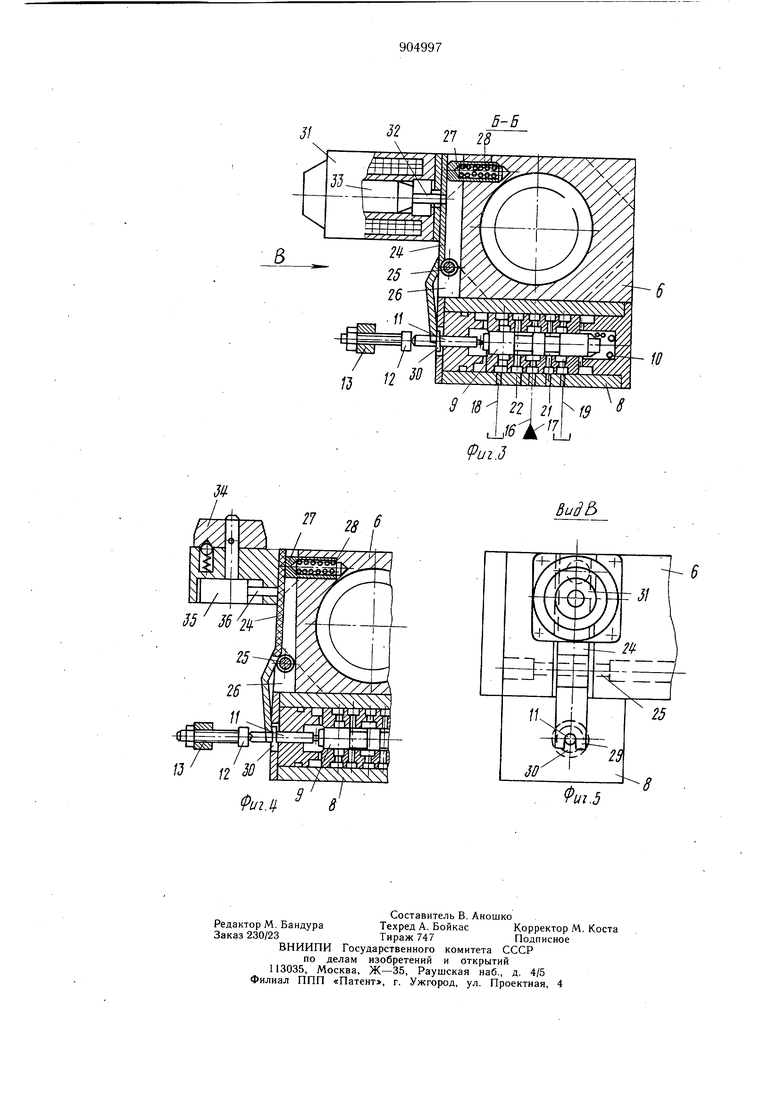
(54) ГИДРОКОПИРОВАЛЬНЫЙ СУППОРТ Изобретение относится к станкостроению, а именно к гидрокопировальным суппортам для металлорежущих станков, преимущественно токарных. Известны гидрокопировальные суппорты, снабженные механизмами управления подводом к обрабатываемому изделию и отводом от него. В этих суппортах следящий золотник закреплен на задней сгенке гидроцилиндра, на которой помимо него смонтирован подпружиненный рычаг, взаимодействующий с электромагнитом механизма управления. Подпружиненный рычаг связан с толкателем следящего золотника через рычажную систему, включающую но.воротный двуплечий рычаг, несущий копировальный щуп f 1. Однако такое взаиморасположение элементов механизма управления подводом и отводом увеличивает габариты устройства в продольном направлении и лишает его компактности. Цель изобретения - повышение компактности. Поставленная цель достигается тем, что в гидрокопировальном суппорте механизм управления подводом и отводом смонтирован на боковой стенке корпуса силового гидроцилиндра со стороны поворотного двуплечего рычага, а подпружиненный рычаг этого механизма установлен в пазу корпуса гидроцилиндра и снабжен вилкой, взаимодействующей непосредственно с толкателем следящего золотника, который закреплен на нижней стенке корпуса гидроцилиндра. На фиг. 1 изображен гидрокопировальный суппорт, вид сверху; на фиг. 2 -- разрез А-А на фиг. 1; на фиг. 3 - следящий золотник и механизм автоматического управления подводом и отводом гидросуппорта, разрез Б-Б на фиг. 1; на фиг. 4 - вариант исполнения механизма ручного управления подводом и отводом гидросуппорта; на фиг. 5 - механизм автоматического управления подводом и отводом гидросуппорта, вид В на фиг. 3. Гидрокопировальный суппорт смонтирован в направляющих основания 1 и несет на себе резцедержатель 2 с резцами 3 (см. фиг. 1 или 2). Неподвижный щток 4 с порщнем 5, расположенным в подвижном гидроцилиндре 6, при помощи кронштейна 7 закреплен на основании 1 (см. фиг. 2). На нижней стенке корпуса гидроцилиндра 6 закреплен следящий золотник 8, в котором установлен подвижный в осевом направлении плунжер 9, с одной стороны поджимаемый пружиной 10, а с другой -. через толкатель 11, взаимодействующий с нажимным винтом 12 поворотного двуплечего рычага 13 (см. фиг. 3), несущего копировальный щуп 14, отслеживающий обрабатываемый профиль детали по копиру 15 (см. фиг. 1). Следящий золотник посредством магистрали 16 подключен к источнику 17 давления и посредством магистралей 18 и 19 соединен со сливом. Магистраль 20 соединяет его со штоковой полостью 21, а магистраль 22 - с поршневой полостью 23 гидронилиндра 6 (см. фиг. 2 и 3). На боковой стенке корпуса гидроцилиндрй 6 со стороны поворотного двуплечего рычага 13 смонтиро;и;м управления подводом и отводО|у1 i;;/ порта, рычаг 24 которого установлен на ocii 25 в паз} 26 корпуса цили1га,ра (Civi. фи 3 к 4). Рычаг 24 через гильзу 27 поджат иру.жиной 28 и снабжен вилкой 29, взакмодсйстзующей с буртиком 30 толкателя i i следящего золотника 8 (см. фиг. 3---5). Управ,е1ие подходом к отводом Л{;оже;-т осхчцсстл/Игьс либс автоматически посредством электромагнита 31, воздействующего гьильцем 32, закрепленным в якоре 33, на рычаг 24 (см. фиг. 3), либо вручную ши iioviOiUM ;)У коятки-34 (на фиг. 1 показана ипрлх-пупктирной линией) посредс ио.м 1;отор.)й оператор поворачивает кулачок 35, воздействующий через штифт 36 на рычаг 24 (см. фиг. 4), Гидрокопировальный, суннорт работает слсдующи.м образом. Для осуществления подвода )та к детали посредством рукоятки 34, которая чсрез кулачок 35 и штифт 36 (при ручном управлении), либо посредством электромагнита 31, якорь 33 которого через пален, 32 (гмт.ч автоматическом управлении), воздействуют на рычаг 24 и, преодолевая усил.че аруж.чны 28, поворачивают его на оси 25, в результате чего вилка 29 от.ходит от буртика 30 толкателя 11, освобождая плунжер 9 следящего золотника 8. Плунжер 9 перемещается под действием пружины 10 (на фиг. 3 влево), соединяя при этом штоковую полость 21 цилиндра 6. через магистраль 16 и 20 с источником 17 давления, а поршневую полость 23 через магистраль 22 и 18 со сливом. В силу того, что шток 4 с поршнем 5 закреплены неподвижно под дхействием давления, подаваемого в иггоковую полость 21, цилиндр 6 с резцедержателем 2 перемещается по направляющим основания 1. В конце подвода щуп 14, касаясь копира 15, поворачивает двуплечий рычаг 13, который, гзоздействуя через нажимной винт 12 и толкатель 11 на плунжер 9 следяпдего золотника 8, переводит гидросуппорт 3 режим слежения по копиру. По окончании копирования заданного профиля изделия вручную (рукояткой 34) или автоматически отк.лючением (.магнита 31) подается ко 1анда на отвод гидросуппорта и штифт 36 (или ггалец 32) освобождает рычаг 24, котор.ый под действием пружины 28 поворачивается на оси 25 и, воздействуя вилкой 29 на буртик 30 толкателя 11, утапливает плунжер 9 в корпус следящего золотника 8, сжимая при этом пружину 10. В результате этого штоковая полость 21 гидроцилиндра 6 соединяется через магистрали 20 и Ш со сливом, а поршневая полость 23 - через :«ггистра.;(и 16 и 22 с источником 17 давле1;ий Этпм достигается отвод резцов 3 ov изделия и :ay;ia-14 от копира 15. I .(сдлггземое изобретение позволяет coKpoiHTb i;-.o осевые габариты за счет размещеггяя следяпхего золотника под корпусом цклкндоа, а механизма управления иодкодом и отводом - на боковой стенке гид;;();п1.- -;дуа со стороны поворотного двупле ei( ::i:;-:; iy;. которьш является элементом, ;.ак::::ий:ьпо пыступаюнхим с боковой стороны суппсртд. Кроме того, изобретение поз|;г.1Л;1ет сиздать универсальную конструкцихз м;-Хо,:-1,;ма управления подводом и отво:,{)f-; :;K;i) как :;учного. так я автома ичес: ;о о, либо комбинирован1юго: ручного к автоматического одновоеменно. 1 идро опироваль;:ыи )T к метал..лорсжуще.му станку, содержащий силовой гидронилиндр, поворотный двуплечий рычаГ: ззаимодействуюпдйй с копиром и толкателем след51ч,е1Ч) золотника, и механизм j;iTpaii, гюдводом и отводом суппорта, включающий в себя управляющий орган, и поднружи11енный рычаг, отличающийся тем, что, с целью повышения компактности, ые.ханизм управления подводо.м и отводом суппорта Смонтирован на боковой стенке корпуса силового гидроцилиндра со стороны новоротного двуплечего рычага, а подпружиненный рычаг этого механизма установлен в пазу корпуса гидроцилиндра и снабжен вилкой, взаимодействующей непосредственно с толкателем следящего золотника, который закреплен на нижней стенке корпуса гидроцилиндра. Источники информации, принятые во внимание при экспертизе 1. Заявка ФРГ № 2247486, кл. В 23 Q 35/06, 1973. л
/I - 5
гг
Фи1.г
J/
Б-5
W
/J 
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидрокопировальный многопроходный суппорт | 1977 |
|
SU680857A1 |
| Гидрокопировальный многопроходной суппорт | 1977 |
|
SU707770A1 |
| Гидравлическое копировальное устройство | 1980 |
|
SU897473A1 |
| Гидрокопировальный многопроходный суппорт | 1982 |
|
SU1050849A1 |
| Гидрокопировальный суппорт | 1977 |
|
SU691277A1 |
| Копировальный гидросуппорт | 1979 |
|
SU848287A1 |
| Копировальный гидросуппорт | 1979 |
|
SU848286A1 |
| Гидрокопировальный суппорт | 1979 |
|
SU912478A1 |
| Копировальный гидросуппорт | 1977 |
|
SU621545A1 |
| Копировальный гидросуппорт | 1977 |
|
SU621544A1 |
ВидЁ
