(54) СПОСОБ ИЗМЕРЕНИЯ КОЛЕБАТЕЛБНОЙ СКОРОСТИ РАБОЧИХ ЛОПАТОК ТУРБОМАШИН
Изобретение относится к виброизмерительной технике и может быть использовано для измерения колебательной скорости рабочих лопаток турбомашин.
Известен способ измерения колебательной скорости рабочих лопаток турбомашин, заключающийся в том, что берут два импульсных бесконтактных датчика, устанавливают их на корпусе турбомашины в окружном направлении на некотором расстоянии друг от друга в плоскости вращения рабочего колеса, измеряют временной интервал между сигналами датчиков, при прохождении лопаток мимо них и по измеренному временному интервалу вычисляют аналитически колебательную скорость рабочих лопаток турбомашин 1.
Недостатком указанного способа является низкая точность измерения, поскольку в нем измеряется величина, обратно пропорциональная квадрату величины окружной скорости.
Наиболее близким по технической сущности к изобретению является способ измерения колебательной скорости рабочих лопаток турбомашин, заключающийся в том, что измеряют окружное расстояние между двумя бесконтактными импульсными датчикаМИ положения, установленными по окружности в плоскости вращения рабочего колеса турбомащины, измеряют временные интервалы между импульсами датчиков в моменты прохождения каждой лопатки и аналитически вычисляют колебательные скорости рабочих лопаток 2.
Недостаток известного способа состоит в том, что он обладает невысокой точностью и надежностью измерения колебательной
to скорости, так как ее значение на один-два порядка меньще окружной скорости. Кроме того, значение скорости определяется в результате расчета, который не позволяет получить сигнал, необходимый для использования в режиме сигнализации работы Турбо15машины.
Целью изобретения является повышение точности и надежности измерений.
Цель достигается тем, что по предлагаемому способу заполняют временной интервал между импульсами датчиков, импульса20ми с частотой, пропорциональной частоте следования лопаток рабочего колеса, определяют разность между числом импульсов датчиков, соответствующих колебательному и неколебательному режимам работы лопаток рабочего колеса, преобразуют определенную разность числа импульсов во вспомогательный интервал умножением этой разности на постоянный период, определяемый заданной точностью измерения, заполняют вспомогательный интервал импульсами с частотой, пропорциональной частоте следования лопаток, измеряют полученное число импульсов и вычисляют колебательную скорость лопаток рабочего колеса турбомашины аналитически по формуле:
(.
где V - колебательная скорость лопаток; N - число импульсов; То - постоянный период, определяемый
заданной точностью измерения; D - диаметр рабочего колеса; Z - число лопаток рабочего колеса; К - коэффициент пропорциональности частоты заполнения временного интервала между импульсами датчиков и частоты заполнения лопаток; л- постоянный коэффициент; L-окружное расстояние между датчиками.
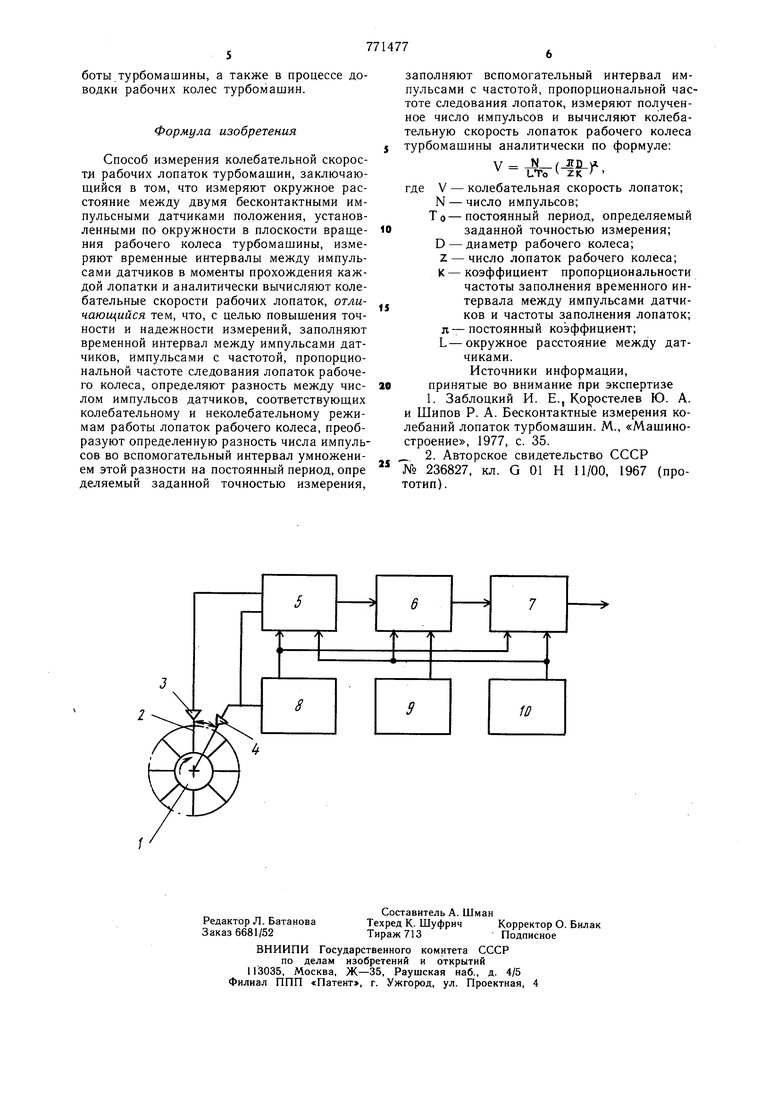
На чертеже изображена блок-схема устройства, реализующего способ.
Блок-схема содержит рабочее колесо 1 турбомашины, лопатку 2 рабочего колеса, импульсные бесконтактные датчики 3, 4 положения, блок 5 измерения временного интервала и выделения разности между числами импульсов, соответствующих колебательному и неколебательному режимам лопаток рабочего колеса, блок 6 хранения разности и выработки вспомогательного интервала, блок 7 преобразо.вания вспомогательного временного интервала в число импульсов, пропорциональное колебательной скорости, блок 8 частоты, пропорциональной частоте следования .лопаток, блок 9 генератора последовательности импульсов с постоянным периодом, блок 10 управления последовательностью выполнения приемов измерения. Выходы импульсных бесконтактных датчиков положения соединены с входами блоков 5 и 8. Выход блока 5 соединен с одним из входов блока 6, а выход последнего соединен с входом блока 7. Выход блока 9 соединен со вторым входом блока 6. Блоки 5, 6 и 7 соединены с блоком 10. Способ измерения колебательной скорости заключается в том, что устанавливают датчики 3 и 4 в окружном направлении, в плоскости вращения рабочего колеса 1. Измеряют окружное расстояние L между датчиками. Временной интервал между импульсными сигналами двух датчиков в момент, когда лопатка 2 рабочего колеса 1 колеблется, равен
OrTuoITnloF
где и - окружная скорость лопатки; А-амплитуда колебания лопатки; 0) - частота колебания лопатки.
Временной интервал между сигналами датчиков 3 и 4, когда лопатка не колеблется, равен
Atcp -.
Сигнал с датчика 4 подают на вход блока 8 частоты, с выхода которого получают последовательность импульсов с частотой
, где о-частота вращения ротора турбомащины;
Z-число лопаток рабочего колеса турбомашины;
к- коэффициент пропорциональности частоты заполнения временного интервала между импульсами датчиков и частоты следования лопаток. На выходе блока 5 получают число импульсов, определяемое формулой
AN - (-)foZK ,-У-
jtB u-v . где V Aoosintoi;
D-диаметр рабочего колеса;
Число импульсов AN подают на вход блока 6, на другой вход которого подают сигналы с блока 9. На выходе блока 6 получают вспомогательный временной интервал, равный
- LZK V т „ jfD u-v о
Временной интервал т подают на вход
блока 7, на другой вход которого подают сигнал с блока 8. На выходе блока получают число импульсов, равное N -М- -/vr ToUZK LToC) X
0 где nDfo и. V
Так как величина «1, то
N LTo(§-)«V.
Затем измеряют полученное число импульсов и вычисляют колебательную скорость лопаток рабочего колеса турбомащины аналитически по формуле:
V
I Т„ V 7k
LTo Z К
V - колебательная скорость лопаток;
N - число импульсов; TO -постоянный период, определяемый
заданной точностью измерения; D-диаметр рабочего колеса; Z-число лопаток рабочего колеса; к - коэффициент пропорциональности частоты заполнения временного интервала между импульсами датчиков и частоты заполнения лопаток; л-постоянный коэффициент; L -окружное расстояние между датчиками.
Использование описываемого спрсоба измерения колебательных скоростей обеспечивает, по сравнению с существующими, более высокую точность и надежность измерений и возможность использования результатов измерений колебательных скоростей в системах сигнализации опасных напряжений рабочих лопаток турбомашин, в системах автоматической обработки результатов измерений и регулирования режима работы турбомашины, а также в процессе доводки рабочих колес турбомашин.
Формула изобретения
Способ измерения колебательной скоросщ рабочих лопаток турбомашин, заключающийся в том, что измеряют окружное расстояние между двумя бесконтактными импульсными датчиками положения, установленными по окружности в плоскости вращения рабочего колеса турбомашины, измеряют временные интервалы между импульсами датчиков в моменты прохождения каждой лопатки и аналитически вычисляют колебательные скорости рабочих лопаток, отличающийся тем, что, с целью повышения точности и надежности измерений, заполняют временной интервал между импульсами датчиков, импульсами с частотой, пропорциональной частоте следования лопаток рабочего колеса, определяют разность между числом импульсов датчиков, соответствующих колебательному и неколебательному режимам работы лопаток рабочего колеса, преобразуют определенную разность числа импульсов во вспомогательный интервал умножением этой разности на постоянный период, опре деляемый заданной точностью измерения.
заполняют вспомогательный интервал импульсами с частотой, пропорциональной частоте следования лопаток, измеряют полученное число импульсов и вычисляют колебательную скорость лопаток рабочего колеса турбомашины аналитически по формуле:
v -ftv(),
где V - колебательная скорость лопаток; N - число импульсов; TO-постоянный период, определяемый
заданной точностью измерения; D-диаметр рабочего колеса; Z - число лопаток рабочего колеса; К - коэффициент пропорциональности частоты заполнения временного интервала между импульсами датчиков и частоты заполнения лопаток; л-постоянный коэффициент; L-окружное расстояние между датчиками.
Источники информации, принятые во внимание при экспертизе 1. Заблоцкий И. Е., Коростелев Ю. А. и Шипов Р. А. Бесконтактные измерения колебаний лопаток турбомащин. М., «Машиностроение, 1977, с. 35. 2. Авторское свидетельство СССР № 236827, кл. G 01 Н 11/00, 1967 (прототип).
