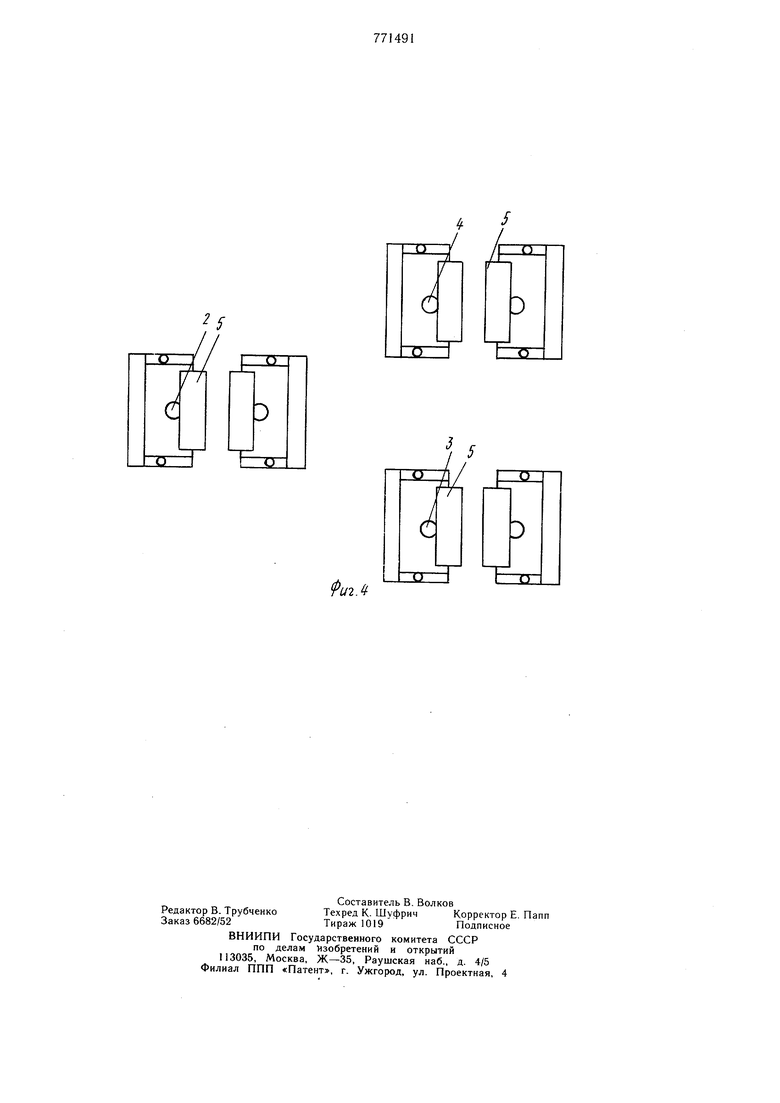
шины 7, приводимые во вращение двигателем сельскохозяйственной машины. На раме 1 т;жже крепятся датчики положения машины 8 барабанов и соответственно колес машины. На раме 9 расположено устройство 10, имитируюш,ее захват шпинделями 11 хлопка с кустарника. Для устойчивости машина в трех точках крепится хомутами 12 к стояку 13.
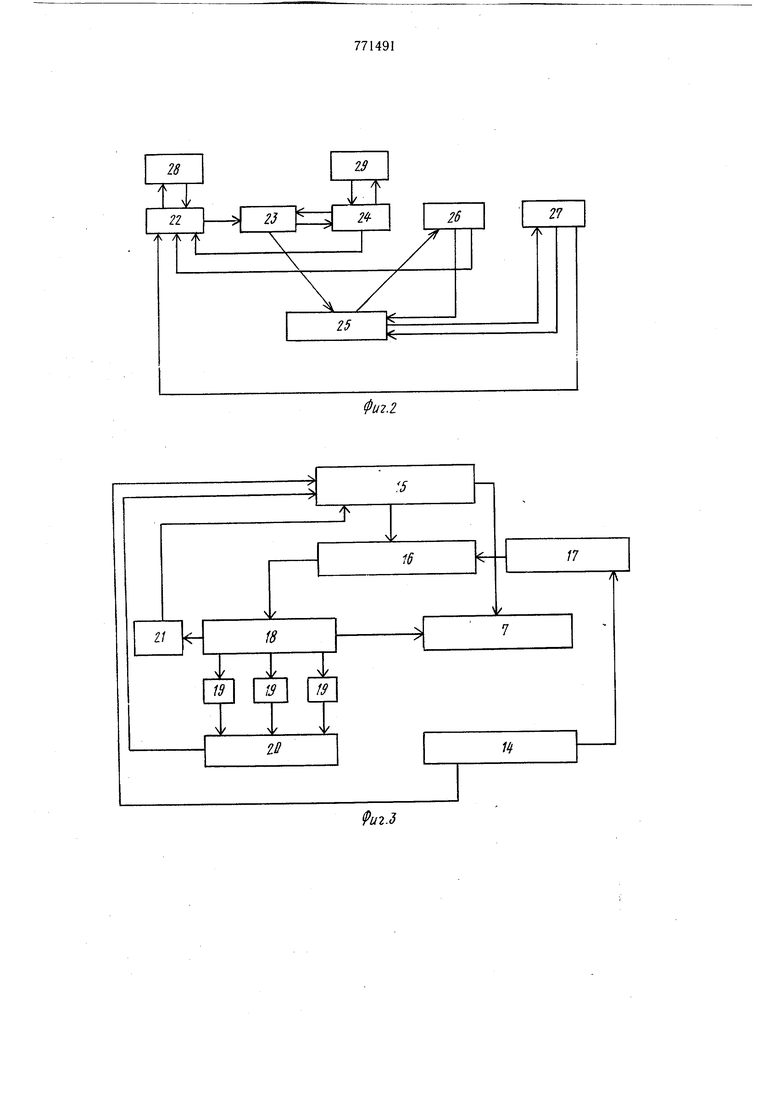
Блок-схема устройства (фиг. 3) состоит из блока 14 управления, программного блока 15, блока 16 управления гидроцилиндров, гидросистемы 17, механизма 18 подъема блока датчиков 19 положения машины блока 20 сравнения, сигнализаторов 21 нижнего положения.
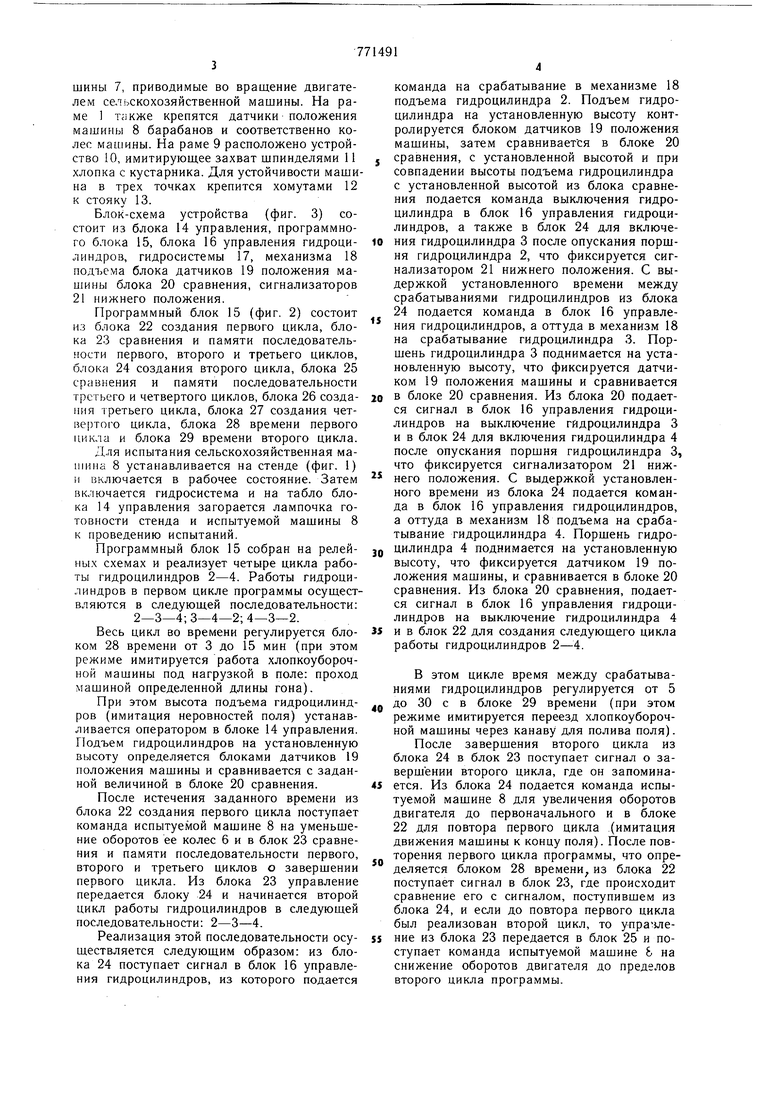
Программный блок 15 (фиг. 2) состоит из блока 22 создания первого цикла, блока 23 сравнения и памяти последовательности первого, второго и третьего циклов, блока 24 создания второго цикла, блока 25 сравнения и памяти последовательности третьего и четвертого циклов, блока 26 создания третьего цикла, блока 27 создания четве|)того цикла, блока 28 времени первого цикла и блока 29 времени второго цикла. Для испытания сельскохозяйственная машина 8 устанавливается на стенде (фиг. 1) и жлючается в рабочее состояние. Затем включается гидросистема и на табло блока 14 управления загорается лампочка готовности стенда и испытуемой машины 8 к проведению испытаний.
Программный блок 15 собран на релейных схемах и реализует четыре цикла работы гидроцилиндров 2-4. Работы гидроцилиндров в первом цикле программы осуш,ествляются в следующей последовательности;
2-3-4; 3-4-2; 4-3-2. Весь цикл во времени регулируется блоком 28 времени от 3 до 15 мин (при этом режиме имитируется работа хлопкоуборочной машины под нагрузкой в поле: проход машиной определенной длины гона).
При этом высота подъема гидроцилиндров (имитация неровностей поля) устанавливается оператором в блоке 14 управления. Подъем гидроцилиндров на установленную высоту определяется блоками датчиков 19 положения машины и сравнивается с заданной величиной в блоке 20 сравнения.
После истечения заданного времени из блока 22 создания первого цикла поступает команда испытуемой машине 8 на уменьшение оборотов ее колес бив блок 23 сравнения и памяти последовательности первого, второго и третьего циклов о завершении первого цикла. Из блока 23 управление передается блоку 24 и начинается второй цикл работы гидроцилиндров в следующей последовательности: 2-3-4.
Реализация этой последовательности осуществляется следующим образом: из блока 24 поступает сигнал в блок 16 управления гидроцилиндров, из которого подается
команда на срабатывание в механизме 18 подъема гидроцилиндра 2. Подъем гидроцилиндра на установленную высоту контролируется блоком датчиков 19 положения мащины, затем сравниваемся в блоке 20
сравнения, с установленной высотой и при совпадении высоты подъема гидроцилиндра с установленной высотой из блока сравнения подается команда выключения гидроцилиндра в блок 16 управления гидроцилиндров, а также в блок 24 для включения гидроцилиндра 3 после опускания поршня гидроцилиндра 2, что фиксируется сигнализатором 21 нижнего положения. С выдержкой установленного времени между срабатываниями гидроцилиндров из блока 24 подается команда в блок 16 управления гидроцилиндров, а оттуда в механизм 18 на срабатывание гидроцилиндра 3. Порщень гидроцилиндра 3 поднимается на установленную высоту, что фиксируется датчиком 19 положения мащины и сравнивается
0 в блоке 20 сравнения. Из блока 20 подается сигнал в блок 16 управления гидроцилиндров на выключение гидроцилиндра 3 и в блок 24 для включения гидроцилиндра 4 после опускания поршня гидроцилиндра 3, что фиксируется сигнализатором 21 нижнего положения. С выдержкой установленного времени из блока 24 подается команда в блок 16 управления гидроцилиндров, а оттуда в механизм 18 подъема на срабатывание гидроцилиндра 4. Поршень гидроQ цилиндра 4 поднимается на установленную высоту, что фиксируется датчиком 19 положения мащины, и сравнивается в блоке 20 сравнения. Из блока 20 сравнения, подается сигнал в блок 16 управления гидроцилиндров на выключение гидроцилиндра 4
5 и в блок 22 для создания следующего цикла работы гидроцилиндров 2-4.
В этом цикле время между срабатываниями гидроцилиндров регулируется от 5
« до 30 с в блоке 29 времени (при этом режиме имитируется переезд хлопкоуборочной машины через канаву для полива поля). После завершения второго цикла из блока 24 в блок 23 поступает сигнал о заверщении второго цикла, где он запоминается. Из блока 24 подается команда испытуемой машине 8 для увеличения оборотов двигателя до первоначального и в блоке 22 для повтора первого цикла (имитация движения машины к концу поля). После повторения первого цикла программы, что определяется блоком 28 времени, из блока 22 поступает сигнал в блок 23, где происходит сравнение его с сигналом, поступившем из блока 24, и если до повтора первого цикла был реализован второй цикл, то ynpa-yie5 ние из блока 23 передается в блок 25 и поступает команда испытуемой машине Ь на снижение оборотов двигателя до пределов второго цикла программы.
В блоке 25 поступивший сигнал запоминается и сравнивается с сигналом, поступившим из блока 26, но так как из блока 26 в блок 25 сигнал не поступал, т. е. еще был реализован третий цикл, то управление блока 25 передается в блок 26 и начинается третий цикл программы, при котором гидроцилиндры срабатывают в последовательности 2-3. После завершения третьего цикла из блока 26 подается сигнал в блок 25 о завершении третьего цикла, где он запоминается, в блок 23 для сброса первоначальной информации и в блок 22 для начала первого цикла. Происходит повторение первого, второго цикла и первого цикла (движения машины в обратном направлении). После завершения первого цикла из блока 23 подается сигнал в блок 25, где он сравнивается с зафиксированным сигналом, поступившим из блока 26 после завершения третьего цикла, и передает управление в блок 27, начинается четвертый цикл программы, при котором гидроцилиндры срабатывают в последовательности 2-4, т. е. при третьем и четвертом циклах программы имитируются правые и левые повороты хлопкоуборочной машины. Высота подъема гидроцилиндров устанавливается на пульте в блоке 14 управления, а контроль осуществляется в блоке датчиков 19 положения машины.
Таким образом, машина совершила по полю один полный оборот.
После завершения четвертого цикла из блока 27 поступает сигнал в блок 22 на начало первого цикла, в блок 25 на сброс предыдущей информации и на испытуемую
машину для увеличения оборотов двигателя хлопкоуборочной машины до первоначальной величины и программа повторяется заново.
Формула изобретения
Устройство для испытаний сельскохозяйственных машин, содержащее смонтированный на раме механизм навески испытываемой машины, гидросистему, связанную с системой управления, и механизм подъема, включающий барабаны с приводными гидроцилиндрами, подключенными к гидросистеме, отличающееся тем, что, с целью повышения эффективности испытания путем приближения условий испытания к реальным, барабаны механизма подъема сгруппированы в соответствии с количеством подвижных узлов испытываемой машины, а сиетема управления содержит программный блок, блоки сравнения и управления, датчики положения машины и сигнализатор нижнего ее положения, при этом выходы блока сравнения и сигнализатора нижнего положения машины связаны с входом программного блока, выход которого через блок управления подключен к входу механизма подъема, а датчики положения машины подключены к входам блока сравнения. Источники информации,
принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 330372, кл. G 01 М 13/00, 1970.
2.Авторское свидетельство СССР № 292050, кл. G 01 М 19/00, 1969.
.IL
сг
,

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного регулирования термообработки в автоклаве | 1988 |
|
SU1621008A2 |
| Устройство для программной закалки длинномерных изделий | 1982 |
|
SU1052554A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОТОЙ ПОДВИЖНОЙ ОПАЛУБКИ | 2003 |
|
RU2250323C1 |
| УСТРОЙСТВО ДЛЯ СНАРЯЖЕНИЯ АРТИЛЛЕРИЙСКИХ БОЕПРИПАСОВ | 2017 |
|
RU2657034C1 |
| КОМБИНИРОВАННЫЙ ПОЧВООБРАБАТЫВАЮЩИЙ АГРЕГАТ | 2005 |
|
RU2295216C1 |
| Дистанционный привод управления главным судовым двигателем /варианты/ | 1983 |
|
SU1191357A1 |
| Устройство для остановки поднимаемой бурильной колонны | 1986 |
|
SU1332003A1 |
| Грузоподъемное устройство | 1988 |
|
SU1648889A1 |
| Автоматизированная система поверхностного полива | 1983 |
|
SU1162385A1 |
| Гидросистема автопогрузчика | 1988 |
|
SU1687923A1 |
СГ
