Изобретение относится к машиностроению и может быть применено в лесозаготовительных машинах мани- пулярного типа.
Цель изобретения - повышение на- дежности и безопасности устройства.
На фиг. 1 схематично представлена лесозаготовительная машина с подвижным противовесом, общий вид; на фиг. 2 - устройство управления противовесом; на фиг. 3 - схема блокя управления.
Один из возможных вариантов лесозаготовительной машины, на которой может быть установлено предлагаемое устройство, включает в себя ходовую, систему 1, поворотную платформу 2 с
манипулятором, содержащим стрелу 3 и рукоять 4, а также монтируемое на манипуляторе захватно-срезающее устройство 5 и противовес 6. Противовес 6 установлен с возможностью перемещения, в частности относительно поворотной платформы 2 посредством гидроцилиндра 7. Для этого противовес 6 может быть закреплен, например, на выходном звене рычажного механизма, смонтированного на поворотной платформе 2, либо, как показано на фиг. 1, противовес 6 может быть установлен с возможностью перемещения в направляющих, установленных на поворотной платформе 2.
Устройство управления противовесом 6 включает насосы 8 и 9, обслу2
00 00 00
со
живающие гидроприводы рабочего оборудования машины, механизмов передвижения и поворотной платформы 2, в том числе гидроприводы пильного меха- низма 10, верхнего захвата 11 и нижнего захвата 12 дерева. Для управления потоками рабочей жидкости от насосов 8 и 9 служат гидрораспределите- ли 13-15. В состав устройства управ- ления входит пульт 16 управления машиной, датчик 17 давления в гидроцилиндрах захватов 11 и 12, датчик 18 диаметра дерева, датчик 19 угла между стрелой и рукоятью манипулятора, датчик 20 положения противовеса и блок 21 управления
Блок 21 управления содержит триггер 22, арифметические устройства 23 и 24, схему 25 сравнения и элементы И 26-28. Выход блока 21 подключен к магнитам 29 и 30 управления гидрораспределителем 15 привода перемещения противовеса 6. Блок 21 управления может содержать цепи руч- ного управления перемещением противовеса 6, например, элементы ИЛИ 31 и 32, к входам которых подключены соответствующие органы управления пульта 16.
Устройство работает следующим образом.
При захвате дерева с пульта 16 управления подается команда на гид- рораспределитель 14 и гидроприводы на закрытие захватов 11 и 12. Эта же команда поступает на один из входов элемента И 26. Когда дерево будет зажато захватами 11 и 12, сработает датчик 17 давления, наст- роенный на рабочее давление в гидросистеме машины. При этом сигнал пройдет с выхода элемента И 26 на один из входов триггера 22 и установит его. После зажатия дерева с пульта 16iснимается команда на гидрораспределитель 14 и он возвращается в нейтральное положение. Арифметическое устройство 23 производит операцию умножения двух сигналов, поступаю- щих на его входы. Первый из этих сигналов поступает от датчика 18 диаметра дерева.
С учетом того, что плотность древесины различных пород приблизитель- ио одинакова, этот сигнал буде эквивалентен массе дерева. Второй сигнал поступает от датчика 19 утла между стрелой 3 и рукоятью 4 манипулятора. С учетом того, что захват каждого дерева осуществляют примерно на одной и той же высоте относительно земли, этот сигнал будет эквивалентен величине вылета манипулятора. Сигнал на выходе арифметического устройства 23 таким образом будет эквивалентен опрокидывающему моменту от дерева. Блок 24 умножает сигнал от датчика 20 положения противовеса 6 на постоянный коэффициент, соответствующий массе противовеса 6„ Сигналы от устройств 23 и 24 сравниваются схемой 25 сравнения о При этом, если опрокидывающий момент от дерева будет превышать удерживающий момент от противовеса 6, то сигнал будет на первом выходе (). Пройдя через элемент И 27, он включает магнит 29 гидрораспределителя 15, вследствие чего противовес 6 будет выдвигаться, а удерживающий момент увеличиваться. Выдвижение противовеса 6 будет продолжаться до тех пор, пока сигналы от устройств 23 и 24 не станут равными. При этом выходной сигнал схемы 25 перенесется с выхода А В на выход А В и гидрораспределитель 15 возвратится в нейтральное положение.
Процесс измерения опрокидывающего момента и выдвижение противовеса 6 на необходимую величину проходит одновременно с процессом пиления дерева и к моменту его подъема от пня устанавливается равенство опрокидывающего и удерживающего момента. После окончания процесса пиления и подъема дерева от пня уменьшают, как правило, вылет манипулятора для уменьшения нагрузок на конструкции машины. При этом угол между стрелой 3 и рукоятью 4 уменьшается, что приводит к уменьшению сигнала с выхода блока 23 и появлению сигнала на выходе схемы 25„ Этот сигнал включает магнит 30 гидрораспределителя 15 и противовес 6 перемещается по направлению к машине до тех пор, пока не уравняются опрокидывающий и удерживающий моменты. Выходной сигнал схемы 25 сравнения вновь переместится на выход А В и гидрораспределитель 15 возвратится в нейг-- ральное положение.
При укладке дерева в пачку с пульта 16 подается команда на раскрытие
1
захватов 11 и 12. Давление в поршневой полости гидроприводов захватов 11 и 12, где установлен датчик 17, снижается и прекращается его сигнал, т„е. триггер 22 переключается в другое состояние, на его выходе появляется нулевой сигнал и запрещает прохождение сигналов с выходов схемы 25 на гидрораспределителъ 15. Таким образом, процесс непрерывного автоматического регулирования положения противовеса 6 происходит с момента зажима дерева захватами 11 и 12 до момента подачи сигнала на их раскрытие .
Зона нечувствительности схемы 25 сравнения выбирается, исходя из динамических параметров системы управления противовесом 6, включающей гидрораспределитель 15, гидроцилиндр 7 и механизм перемещения противо- веса0
Формула изобретения 25
30
Грузоподъемное устройство, содержащее гидропривод грузового захвата, гидроцилиндр перемещения противовеса, сообщенный трубопроводами с гидрораспределителем, пульт управления, узел управления гидрораспределителем, включающий в себя датчик положения противовеса и датчик выле10
15
25
48889
та стрелы с грузовым захватом, отличающее ся тем, что, с целью повышения надежности и безопасности устройства, узел управления гидрораспределителем снабжен датчиком давления в гидроприводе грузового захвата, датчиком диаметра захватываемого груза и блоком управления, датчики и гидрораспределитель выполнены с электроуправлением, причем блок управления включает в себя триггер, элементы И, умножитель, масштабный усилитель и схему сравнения, входы триггера соединены соответственно с первым выходом пульта управления и с выходом первого элемента И, а выход триггера - с первыми входами второго и третьего элементов И, входы первого элемента И - с вторым выходом пульта управления и выходом датчика давления, входы умножителя - с выходами датчика диаметра и датчика вылета, выход умножителя - с первым входом схемы сравнения, вход масштабного усилителя - с выходом датчика положения противовеса, а выход - с вторым входом схемы сравнения, выходы 30 которой соединены соответственно
с вторыми входами второго и третьего элементов И, выходы которых соединены с входами управления гидрораспределителя о
20


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления лесозаготовительной машиной | 1990 |
|
SU1757532A1 |
| Гидропривод лесозаготовительной машины | 1979 |
|
SU957796A1 |
| Лесозаготовительная машина | 1978 |
|
SU778726A1 |
| Гидропривод манипулятора лесозаготовительной машины | 1978 |
|
SU697100A1 |
| Гидропривод лесозаготовительной машины | 1979 |
|
SU1079001A1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ЗАХВАТНО-СРЕЗАЮЩИМ УСТРОЙСТВОМ ВАЛОЧНО-ПАКЕТИРУЮЩЕЙ МАШИНЫ | 2013 |
|
RU2529156C2 |
| Лесозаготовительная машина | 1980 |
|
SU931132A1 |
| Гидропривод рабочих органов лесозаготовительной машины (его варианты) | 1984 |
|
SU1259527A1 |
| Система управления гидравлическим манипулятором лесозаготовительной машины | 1979 |
|
SU861063A1 |
| Робототехнический комплекс | 1990 |
|
SU1726235A1 |
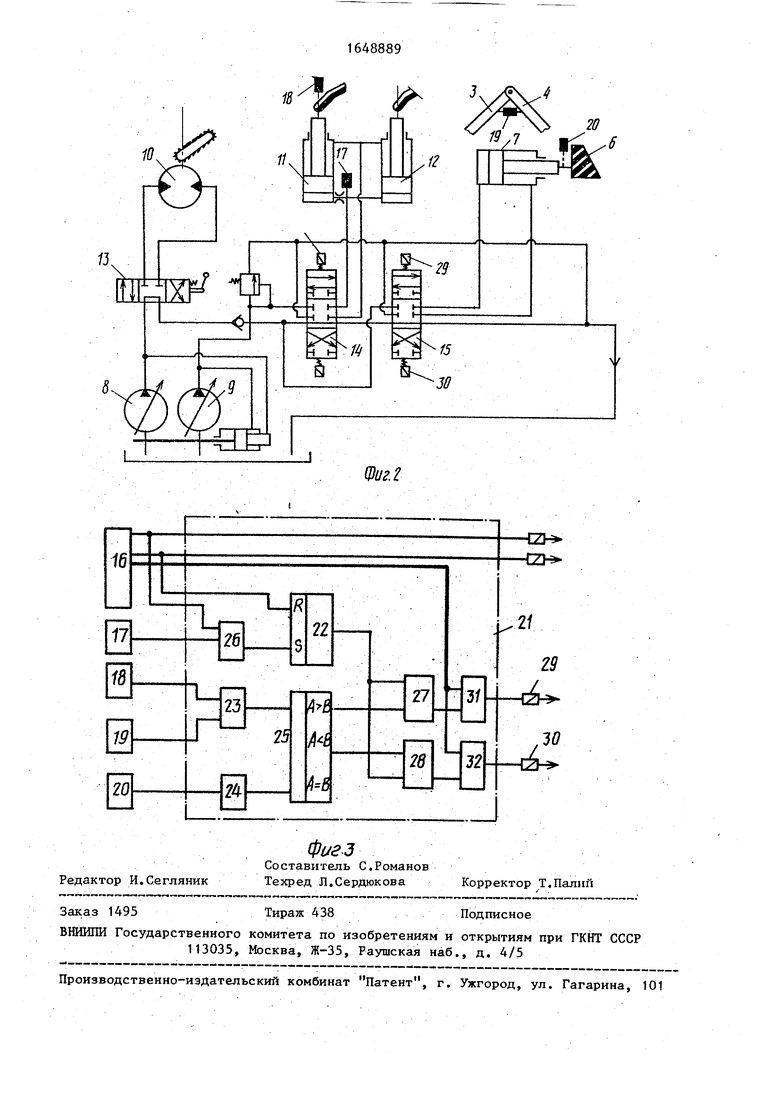
Изобретение относится к лесозаготовительным машинам манипуляторно- го типа Цель изобретения - повышение надежности и безопасности устройства. Устройство управления прогивовесом включает насосы, обслуживающие гидроприводы рабочего оборудования машины, механизмов передвижения и поворотной платформы, пильного механизма, верхнего и нижнего захватов дерева, пульт 16 управце- ния, датчик 17 давления в гидроцилиндрах захватов, датчик 18 диаметра дерева, датчик 19 угла между стрелой и рукоятью манипулятора, датчик 20 положения противовеса, соединенные с блоком 21 управления, который содержит триггер 22, арифметические устройства 23 и 24, схему 25 сравнения и элементы И 26, 27, 28. Выход блока 21 подключен к входам 29, 30 управления гидрораспределителем привода перемещения противовеса. 3 ил. с S С
;
Фиг.1
Редактор И.Сегляник
фигз
Составитель С.Романов
Техред Л.Сердюкова Корректор Т.Палий
Заказ 1495
Тираж 438
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Подписное
| Устройство для автоматического управления противовесом стреловых грузоподъемных машин | 1976 |
|
SU658072A1 |
