Изобретение относится к области машиностроительного оборудования и может быть использовано при создании очувствленных копирующих манипуляторов , работающих в экстремальных средах. Известны системы управления очувствлеиными копирующими манипулятора.ми. Система, содержащая следящий привод исполнительного органа и следящий привод воспроизведения сил нагрузки исполнительного органа на задающем органе 1, сложна в настройке и склонна к автоколебаниям, особенно в тех случаях,когда кинематические цепи манипулятора имеют ог раниченную жесткость и зазоры в зац плениях. Наиболее близким техническим решением к данному изобретению являет система 2, содержащая последовате но соединенные первый усилитель и первый двигатель, механически связанный с первым датчиком нагрузки, который механически соединен с первым датчиком положения и через первый редуктор с механизмом положител ного органа, последовательно соедин ные второй усилитель и второй двига .тель, связанный через второй редуктор со вторым датчиком положения и вторым датчиком нагрузки, который механически соединен с механизмом задающего органа, механически связанного с первым ключом. Недостатком этой система является низкая ее устойчивость , склонность к автоколебаниям. Целью изобретения является повьвиение динамических характеристик системы. Сущность изобретения заключается в том, что систем содержит второй ключ, первый и второй диодные ограничители, а также последовательно соединенные генератор тактовых импульсов, третий ключ, реверсивный счетчик и дешифратор, выход которого подключен ко входу первого усилителя, второй выход генератора тактовых импульсов через последовательно соединенные первый и второй ключи пoдк ;ючeн ко второму входу реверсивного счетчика, первые входы первого и второго диодных ограничителей подключены к выходу первого датчика нагрузки, вторы.е входы - к выходу второго датчика нагрузки, а выходы ко вторым .входам второго и третего ключей соответственно, а выходы
первого и второго датчика положения соединены с соответствующими входами второго усилителя.
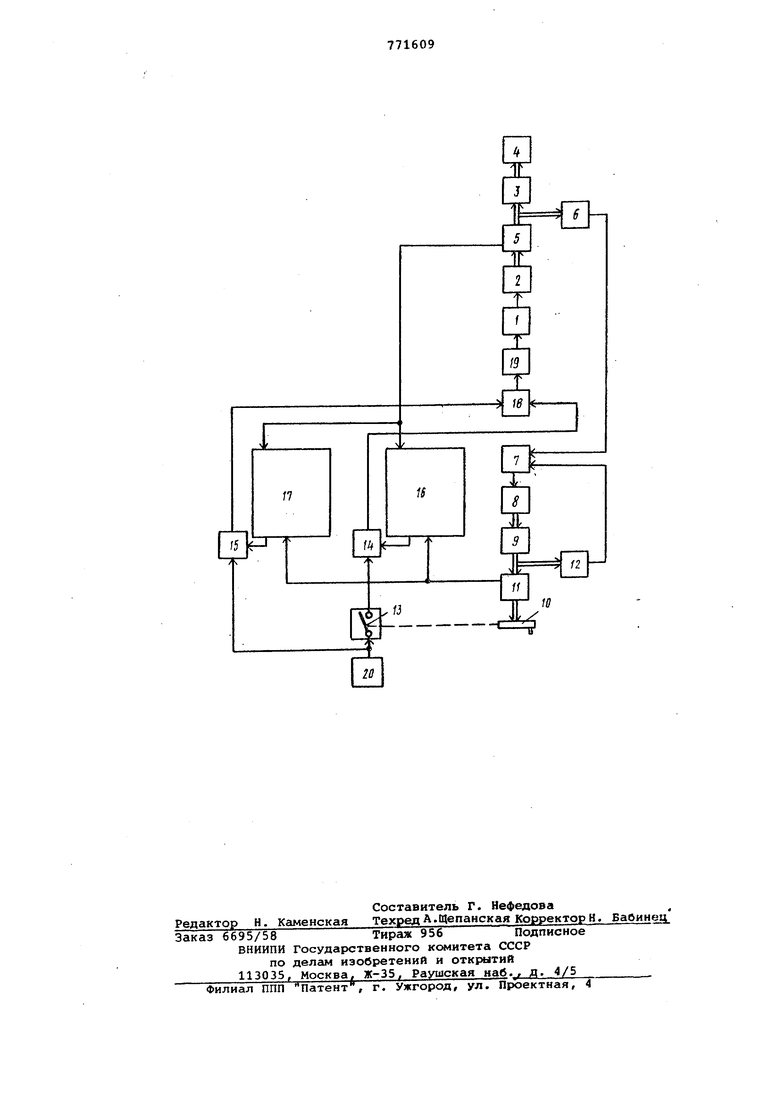
На чертеже представлена функцио.нальная схема системы, где: 1 первый усилитель, 2 - первый двигатель, 3 - первый редуктор, 4 - механизм исполнительного органа, 5 - первый датчик положения, 7 второй усилитель, 8 - второй двигатель, 9 - второй редуктор, 10 механизм задающего органа, 11 второй датчик нагрузки, 12 - второй датчик положения, 13 - первый ключ, 14 - второй ключ, 15 - третий ключ, 16 - первый диодный ограничитель,. 17 - второй диодный ограничитель, 18 - реверсивный счетчик, 19 - дешифратор, 20 - генератор тактовых импульсов.
Система работает следующим образом.
В исходном состоянии система неподвижна. Положения механизмов задающего 10 и исполнительного органов 4 манипулятора взаимно согласованы. На диодных ограничителях 16 и 17 заранее установлены опорные напряжения УОП и Uor, , причем Uon Под влиянием опорного напряжения Uon второй -ключ 14 открывается.
Оператор воздействует на згодающий орган для перемещения исполнительного органа манипулятора вверх. Самое незначительное воздействие оператора на задающий огран обеспечивает включение первого ключа 13, при этом появляется положительный сигнал на датчике нагрузки 11, кроме этого тактовые импульсы через ключ 13 и ключ 14 будут поступать в реверсивный счетчик 18. Число, хранившееся в счетчике 18, будет увеличиваться. Дешифратор 19 преобразует это число в пропорциональный сигнал управления, который постпит в первый усилитель 1. Первый двигатель 2 начинает развивать вращающий момект. Этот момент контролируется первым датчиком нагрузки 5. На выходе датчика 5 возникает напряжение Uj, противоположное напряжению UtA
Если и„ + УОП 14 разомкнет цепь управления и увеличение числа, хранящегося в счетчике 18, прекратится.
Если и„ + Ujjnj Ug , то откроется третий ключ 15 и на соответствющий вход счетчика 18 будут поступать импульсы, уменьшение число, хранящееся в счетчике 18, и сигнал поступающий в усилитель 1.
Если под влиянием сигнала управления двигатель 2 будет перемещать механизм исполнительного органа 3, то двигатель 8 обеспечит соответ-. ствующее перемещение механизма задающего органа 10 благодаря взаимной связи между датчиками положения 6, 12 и усилителем 7. Чем больше опорное напряхсение , ,тем меньшее усилие должен развивать оператор для преодоления веса груза, поднимаемого исполнительным органом.
Формула изобретения
Система управления очувствленным копирующим манипулятором, содержащая последовательно соединенные первый усилитель и первый двигатель механически связанный с первым датчиком нагрузки, который механически соединен с первым датчиком положения и через первый редуктор - с механизмом исполнительного органа, последовательно соединенные второй усилитель и второй двигатель, связанный через в±орой редуктор со вторым датчиком положения и вторым датчиком нагрузки, который механически соединен с механизмом задающего органа, механически связанного с первым ключом, отличающаяся тем, что, с целью повышения динамических характеристик системы, она содержит второй ключ, первый и второ диодные ограничители, а также последовательно соединенные генератор тактовых импульсов,.третий ключ, реверсивныЯ счетчик и дешифратор, выход которого подключен кО входу первого усилителя, второй выход генератора тактовых импульсов через последовательно соединенные первый и втор ключи подключен ко второму входу реверсивного счетчика, первые входы певого и второго диодных ограничителей подключены к выходу первого датчика нагрузки, вторые входы - к выходу второго датчика нагрузки, а выходы - ко вторым входам второго и третьего ключей соответственно, а выходы перт вого и второго датчика положения соединены с соответствующими входами второго усилителя.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР 398386, кл, В 25 J 3/04, 1970.
2,Авторское свидетельство СССР 389922, кл. В 25 J 1/00, 1972, (прототип)
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления манипулятором | 1980 |
|
SU885968A1 |
| Шаговая система программного управления манипулятором | 1978 |
|
SU746433A1 |
| Индукционная плавильння установка | 1984 |
|
SU1202083A1 |
| Система управления гидрофицированной установкой | 1980 |
|
SU1143837A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1992 |
|
RU2069889C1 |
| Интерактивная система управленияРОбОТОМ | 1979 |
|
SU798713A1 |
| Программный регулятор | 1978 |
|
SU744468A1 |
| Устройство для программного управления | 1977 |
|
SU734620A1 |
| Система управления многоканальнымэлЕКТРОпРиВОдОМ РОбОТА | 1979 |
|
SU805246A1 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1124256A1 |