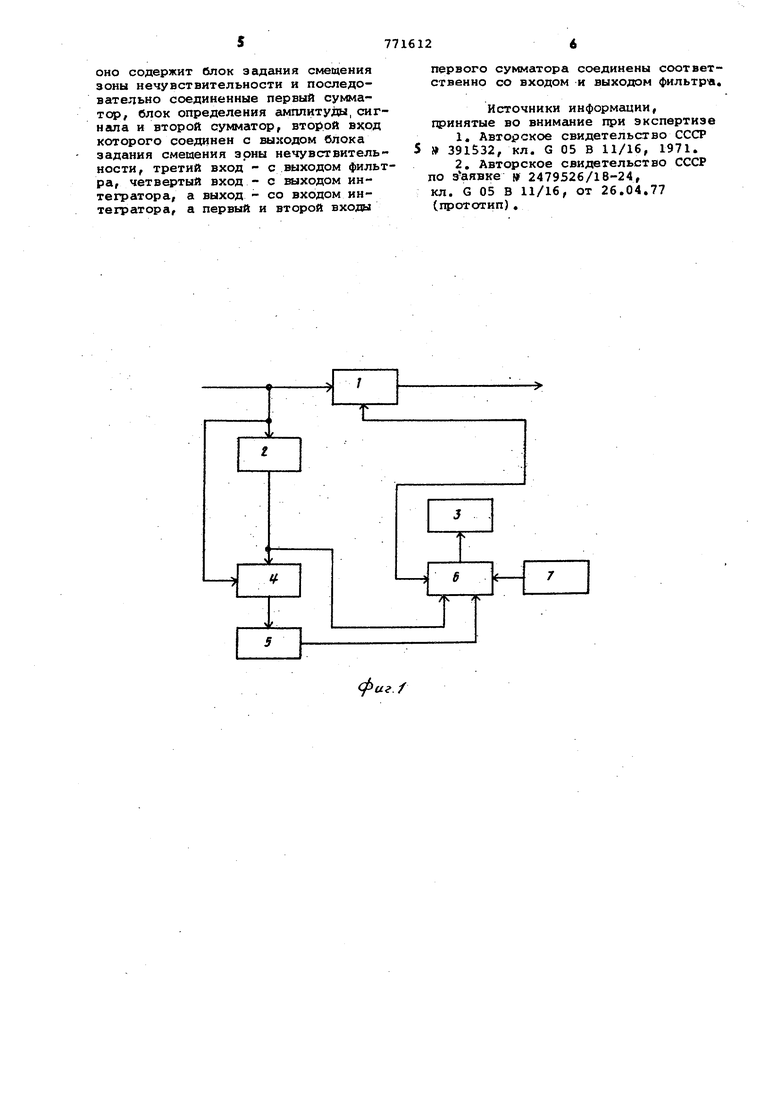
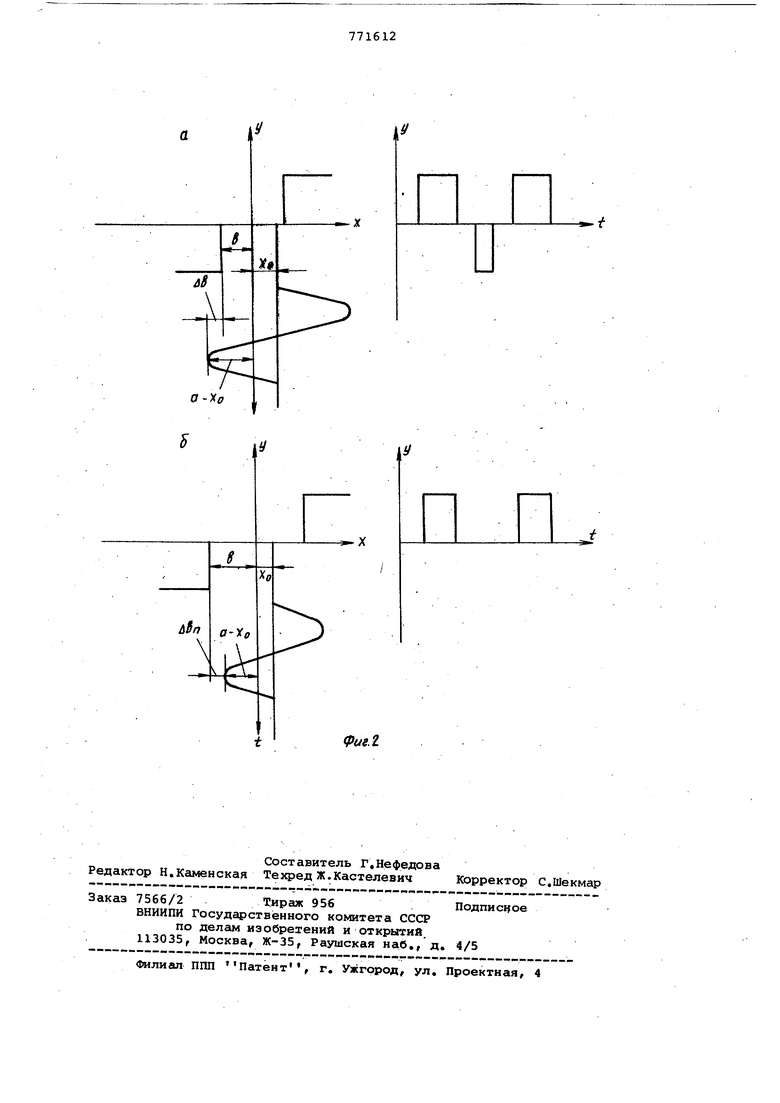
Изобретение относится к области автоматического управления и регулирования систем с переменными параметрами и может быть использовано в релейных системах управления .медленно протекающими процессами и инерционными объектами в условиях воздействия на них изменяющихся возмущений. Известны управляющие устройства, содержащие трехпозиционное реле и использующиеся в случае изменения параметров объекта регулирования Щ Такое устройство не обеспечивает высокой точности работы система ав матического регулирования. Наиболее близким по.технической сущности является релейное управляю щее устройство С2 содержащее реле с зоной нечувствительности, первый вход которого соединен со входом . устройства и входом фильтра, второй вход - с выходом интегратора. Это устройство позволяет автомат чески регулировать величину зоны нечувствительности, так чтобы систе ма находилась на границе перехода С7Г однополярного режима работы реле ного элемента к двухполярному, не допуская при этом двухполярного режима в основном контуре управления. Этот режим работы позволяет существенно повысить точность релейной систеNw автоматического регулирования. Однако в таком релейном управляющем устройстве величина зоны нечувствительности определяется значением медленно меняющейся составляющей периодического процесса, которое прежде всего зависит от величины внешнег го вoзмs цaющeгo воздействия, прило- . женного к объекту регулировашия системы. В результате этого при малой величине медленно меняющейся составляющей изменение зоны нечувствительности гфоисходит с небольшой скоростью, в то время как.значение зоны нечувствителйности может существенно отличаться от того, которое обеспечивает переход от двухполярного режима работы реле к однополярному. Это положение может привести к затяжке процесса регулирования зоны не-чувствительности. При большой величине медленно меняющейся составляннцей скорость изменения зоны нечувствительности увеличивается, в то время как величина зоны нечувствительности может незначительно отличаться от значения, обеспечивающего переход от двухполярн го режима к однополярному, В результате этого может произойти перерегули рование при изменении зоны нечувствитель.юсти, Регулирование зоны нечувствительности происходит в зависимости от полярности, сигнала на.выходе pejse. Использование выходного сигнала релейного устройства приводит к возникновению запаздывания в регулировании в личины зоны нечувствительности, что увеличивает вероятность появления дву полярного сигнала на выходе реле и, следовательно у судшает точность работы -релейного устройства, ЦеМью изобретения является улучше динамических характеристик релейного управляющего устройства путем уменьшения перерегулирования и запаз дывания в процессе регулирования вел чины зоны нечувствительности. Цель достигается тем, что релейно управляющее устройство содержит блок задания смещения зоны нечувствительн ти и последовательно соединенные первый сумматор, блок определения ам плитуды сигнала и второй сумматор, йторой вход которого соединен с выходом блока задания смещения зоны не чувствительности, третий вход - с выходом фильтра, четверты вход с выходом интегратора, а выход - со входом интегратора, а первый и второ входы первого сумматора соединены со ответственно со входом.и выходом фильтра. На фиг. 1 представлена блок-схема предлагaejvTOго устройства, где приняты следующие обозначения: реле, с зон нечувствительности 1, фильтр 2, инте ратор 3, первый сумматор 4, блок определения амплитуды сигнала 5, второй сумматор б, блок задания смещения зоны нечувствительности 7; на фиг. 2 - смещение диаграммы работы устройства. Работает релейное управляющее уст ройство следующим образом. Входной сигнал, состоя дни из медленно меняющейся и быстро меняющейся составляющих одновременно подается на реле 1, фильтр 2 и первый сумматор 4. Сигнал с выхода реле 1. идет в основной контур управления, все остальные элементы -и связи устройст ва служат для обеспечения автоматической настройки требуемой зоны не.чувствительности. Изменение зоны нечувствительност реле 1 осуществляется сигналом с вы хода интегратора 3, на вход которог подается со второго сумматора б раз ность амплитуды быстро меняющейся и величины медленно меняющейся состав ляющей, а также инвертированное тек щее значение зоны нечувствительноеи и сигнал смещения зоны нечуветви ельности, поступающий с блока 7, Определение быстро меняющейся сос авляющей осуществляется в первом сумматоре 4, который вычитает йэ входного сигнала значение медленно еняющейся составляющей с фильтра 2, Определение максимального и минимального значения быстро меняющейся сосавляющей, а, следовательно, и вычисление амплитуды данного сигнала цэоизводится в блоке определения амплитуды сигнала. Если на выходе реле 1 существует двухполярный сигнал (фиг, 2а), то отклонение зоны нечувствительности - положительно, и происходит увеличение зоны нечувствительности до величины {а - XQ +ABfv) . Здесь -в - программное смещение зоны нечувствительности, введение которого обеспечивает надежный переход от двухполярного режима работы к однополярному. Если же на выходе реле 1 существует однополярный сигнал (фиг. 26), то отклонение зоны нечувствительности Лв - отрицательно, и происходит уменьшение зоны нечувствительности до величины (а - Xq, + Д вп) , В этом случае введение сигнала сйещения ЛВа зоны нечувствительности обеспечивает нахождение системы на границе перехода от однополярного режима работы реле 1 к двухполярно1 1у, не допуская при этом двухполярного режима в основном контуре управления. Величина а B f7 зависит от параметров системгд и величины и характера изменения внешнего возмущения и задается с помощью блока заданий смещения зоны нечувствительности 7, в качестве которого может быть использован делитель напряжения. Таким образом, регулирование величины зоны нечувствительности реле 1 осуществляется в соотв-згствии с алгоритмом в - (а - Хр - в +йв„). Итак, использование для регулирования зоны нечувствительности информации о входном сигнале релейного элемента позволяет уменьшить перерегулирование и запаздывание процесса регулирования, что существенно улучшит динамические характеристики релейного управляющего устройства. Формула изобретения Релейное управляющее устройство, содержащее реле с зоной нечувствительности, первый вход которого соединен со входом устройства и входом фильтра, второй вход - с выходом интегратора, отличающеес я тем, что, с целью улучшения ди-.. намических характеристик устрсйств.:1
оно содержит блок задания смещения зоны нечувствительности и последовательно соединенные первый сумматор, блок определения амплитуды,сигнала и второй сумматор, второй вкод которого соединен с выходом блока задания смещения зоны нечувствительности, третий вход - с выходом фильтра, четвед тый вход с илходом интегратора, а выход - со входом интегратора, а первый и второй входы
первого сумматора соединены соответственно со входом и выходом фильтр-а.
Источники информации, принятые во внимание при экспертизе
1,Авторское свидетельство СССР 391S32, кл. G 05 В 11/16, 1971.
2.Авторское свидетельство СССР по заявке 2479526/18-24,
кл. G 05 В 11/16, от 26.04.77 (прототип) .
| название | год | авторы | номер документа |
|---|---|---|---|
| Релейное управляющее устройство | 1979 |
|
SU849139A1 |
| Релейное управляющее устройство | 1978 |
|
SU859999A1 |
| Релейное управляющее устройство | 1979 |
|
SU800961A1 |
| Релейное управляющее устройство | 1977 |
|
SU622045A1 |
| Релейное управляющее устройство | 1981 |
|
SU1004965A1 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2391691C1 |
| УСТРОЙСТВО ДЛЯ УГЛОВОЙ СТАБИЛИЗАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 1990 |
|
SU1827987A1 |
| Модель частотно-импульсного модулятора | 1977 |
|
SU651365A1 |
| Система автоматического управления | 1984 |
|
SU1249490A1 |
| Развертывающий усилитель | 1988 |
|
SU1508245A2 |
фиг. /
-Х
Фиг.г
