Изобретение относится к автоматическому управлению и регулированию систем с переменными параметрами и может быть использовано в релейных системах управления медленно протека;ющими процессами и инерционными объектами в условиях воздействия на них изменяющихся возмущений. Известны управляющие устройства, содержащие трехпозиционные реле и использующиеся в случае изменения параметров объекта регулирования LlJ Однако такие устройства не обеспечивают высокой точности работы систем автоматического регулирования .i Наиболее близким по технической сущности к предлагаемому является релейное управляющее устройство, содерЖсццее реле с зоной нечувствительности фильтр и последовательно соединенные инвертор, коммутатор, интегратор второе реле с зоной нечувствительности и логический блок, выход которого соединен с управляющш/i входом коммутатора, второй вход - с выходом фильт ра, первый вход первого реле с зоной нечувствительности соединен с выходом интегратора, а вход фильтра - со вторыми входами первого и второго реле с зоной нечувствительности. Данное устройство позволяет автоматически регулировать величину зоны нечувствительности так, чтобы система находилась на границе перехода от однополярного режима работы релейного элемента к двухподярному, не допуская при этом двухполярного режима в основном контуре управления. Этот режим работы позволяет существенно повысить точность релейной системы автоматического регулирования Однако в известном устройстве не используется информация о входном сигнале, в результате чего может возникнуть запаздывание при регулировании зоны нечувствительности, что ухудшает точность. Цель изобретения - улучшение динамических характеристик релейного устройства для увеличения точности системы- автоматического регулирования. Указанная цель достигается тем, что релейное управляющее устройство содержит последовательно соединенные первый сумматор, блок определения амплитуды сигнала и второй сумматор, выход которого соединен со входом инвертора, вторым, входом коммутатора и jтретьим входом логического блока, вто:рой вход - с выходом интегратора, третий вход - с выходом фильтра и первы входом первого сумматора, второй вхо которого соединен со входом фильтра.
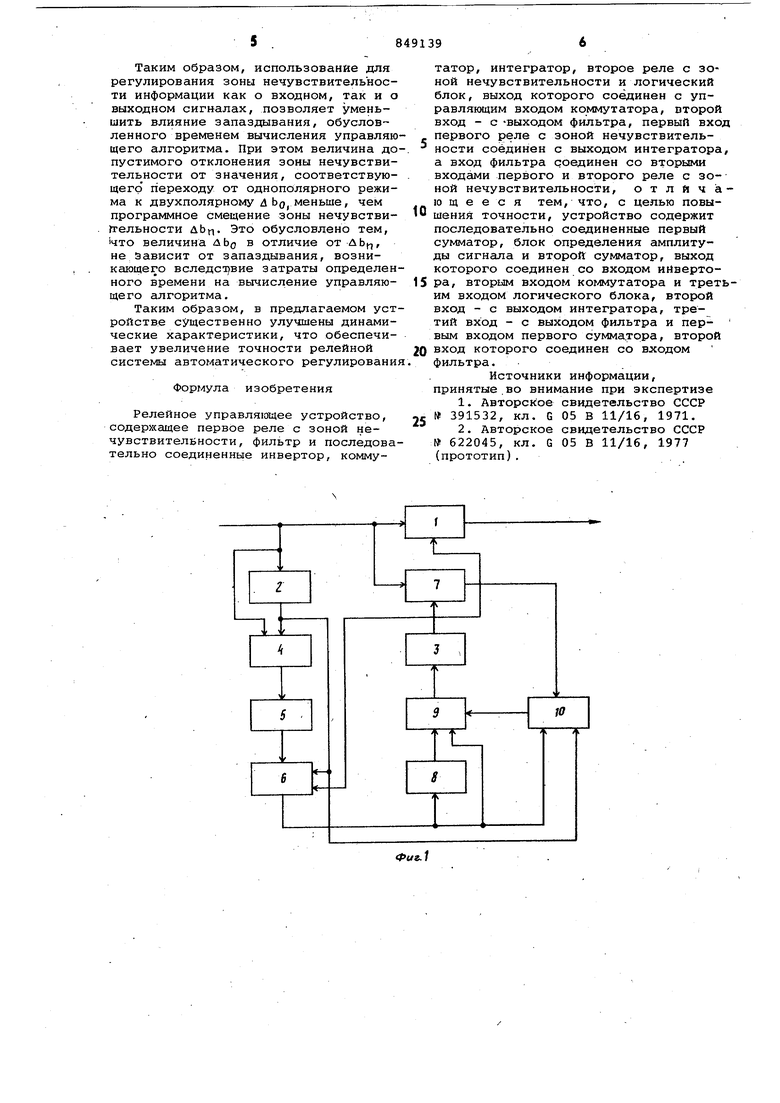
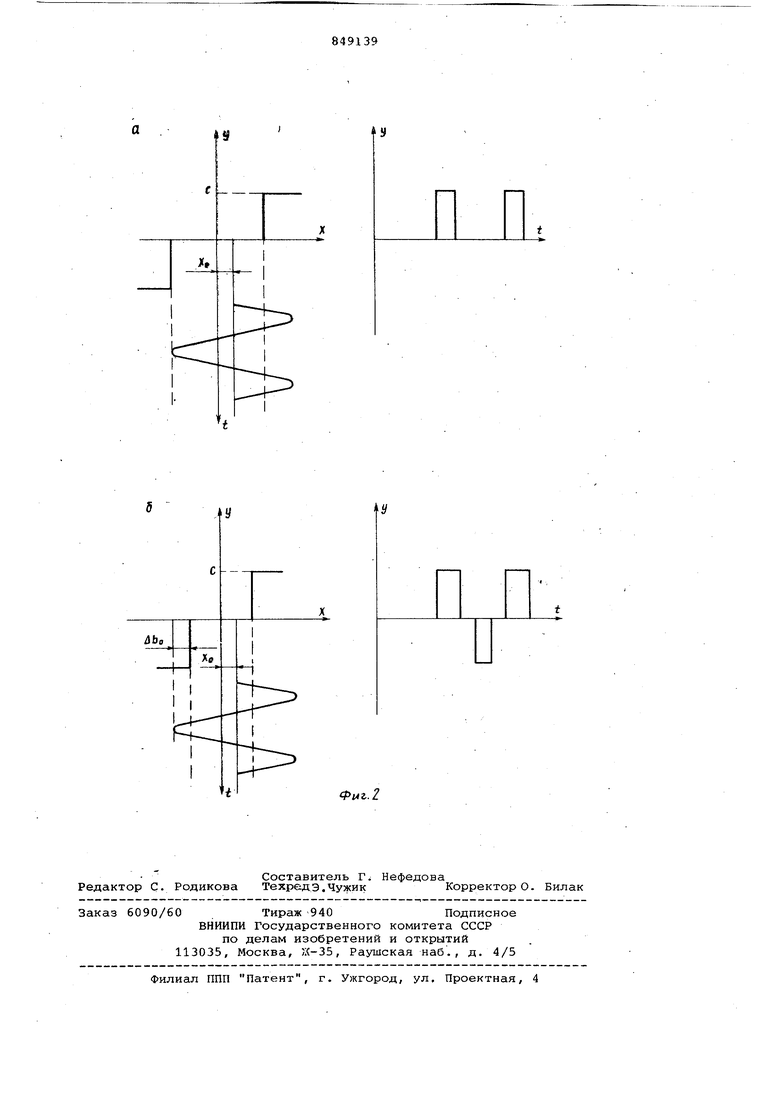
На фиг. 1 представлена структурна схема предлагаемого устройства} на фиг. 2 - временные диаграквФ его работы.
Устройство содержит первое реле 1 с зоной нечувствительности, фильтр 2 интегратор 3, первый сумматор 4, блок 5 определения амплитуды сигнала, вто рой сумматор б, второе реле 7 с зоно нечувствительности, инвертор 8, коммутатор 9, логический блок 10.
Релейное управляющее устройство работает следующим образом.
Входной сигнал, состоящий из медленно меняющейся и быстро меняющейся составляющих.одновременно подается на реле 1 и 7, фильтр 2 и первый сумматор 4. Сигнал с выхода реле 1 идет в основной контур управления, все остальные элементы и связи устройства служат для обеспечения автоматической настройки требуемой зоны нечувствительности.
Изменение зоны нечувствительности реле 1 и 7 осуществляется сигналом с выхода интегратора 3, на вход которого подается со второго сумматора б разность амплитуды, быстро меняющейся, и величины медленно меняющихся составляющих, а также инвертированно текущее значение зоны нечувствительности. Определение быстро меняющейся составляющей осуществляется в первом cyivBviaTOpe 4, который вычитает из вхоного сигнала значение медленно меняющейся составляющей, поступамцей с фильтра 2. Определение максимального и минимального значения быстро меняющейся составляющей, а следовательно, и вычисление амплитуды данного сигнала производится в блоке 5 определения амплитуды си-гнала.
Если на выходе реле 1 существует двухполярный сигнал, то отклонение зоны нечувствительности (j-b положительно, и происходит увеличение зоны нечувствительности реле 1 до величины а - XQ.
Зона нечувствительности второго реле 7 меньше зоны нечувствительности первого реле 1 на величину 4Ьд, зaвиqяp yю от характера изменения параметров объекта регулирования и вненего озмущения.
Да)ьнейшая задача заключается в том, чтобы обеспечить надежный переход от двухполярного режима работы реле к однополярному и чтобы величина зоны нечувствительности соответствовала границе перехода от однополярного режима работы реле 1 к двухполярному, не допуская при этом двухполярного режима в основном контуре управления.
Для решения данной задачи в логическом блоке 10 осуществляется следующая операция.
При выполнении условий и логический блок воздействует на коммутатор 9, в результате чего происходит инвертирование сигнала с выхода второго сумматора б. Здесь с величина импульсов на выходе второго реле 7.
Учитывая это, работа релейного управляющего устройства происходит следующим образом.
Когда в результате увеличения зоны нечувствительности первого реле 1 ее значение становится больше, чем а - Хд , знак отклонения зоны нечувствительности-ДЬ изменяется на отрицательный. В этом случае сигнал на выходе первого реле 1 становится однополярным, но на выходе реле 7 может остаться двухполярным (4|иг. 2 д и 5 ) , а следовательно, при отрицательном импульсе на выходе второго реле 7 выполняется условие, приведенное выше. За счет воздействия логического блока 10 коммутатор 9 меняет знак сигнала с выхода второго сумматора 6, и увеличение зоны нечувствительности реле 1 и 7 продолжается до тех пор, покй сигнал н выходе второго реле 7 не становится однополярным. Тогда прекращается воздействие логического блока 10 на коммутатор 9, и сигнал с выхода второго cyм лaтopa б поступает на вход интегратора 3 без инвертирования. В этом случае происходит уменьшение зоны нечувствительности, так как .
Без учета операций, выполняемых логическим блоком 10, при уменьшении зоны нечувствительности первого реле 1 засчет запаздывания, обусловленного временем вычисления управляющего алгоритма, может сложиться положение, когда при отрицательном значении отклонения зоны нечувствительности Д Ь (что соответствует однополярному режиму работы первого реле 1) на выходе первого реле 1 появится двухполярный сигнал, что является недопустимым.
Ликвидация данного явления обеспечивается использованием предлагаемого устройства. В этом случае при уменьшении зоны нечувствительности двухполярный сигнал возникает раньше на выходе второго реле 7 по сравнению с реле 1, и вновь выполняется условие, при котором логический блок 10, воздействуя на коглмутатор 9, обеспечивает инвертирование сигнала с выхода второго сумматора б и тем самым обуславливает увеличение зоны нечувствительности обоих реле 1 и 7. Регулирование зоны нечувствительности первого реле 1 осуществляется в соответствии с управлям им алгоритмом 5 Ь Па - хд- Ь) dt. Таким образом, использование для регулирования зоны нечувствительности информации как о входном, так и о выходном сигналах, позволяет уменьшить влияние запаздывания, обусловленного временем вычисления управляю щего алгоритма. При этом величина до пустимого отклонения зоны нечувствитель ности от значения, соответствующего переходу от однополярного режима к двухполярному 4 b(j| меньше, чем программное смещение зоны нечувствительности ДЬ. Это обусловлено тем, что величина ДЬо в отличие от ДЬ,, не Эависит от запаздывания, возникающего вследс1)вие затраты определен ного времени на вычисление управляющего алгоритма. Таким образом, в предлагаемом уст ройстве существенно улучшены динамические характеристики, что обеспечивает увеличение точности релейной системы автоматического регулировани Формула изобретения Релейное управляющее устройство, содержащее первое реле с зоной нечувствительности, фильтр и последовательно соединенные инвертор, коммутатор, интегратор, второе реле с зоной нечувствительности и логический блок, выход которого соединен с управляющим входом коммутатора, второй вход - с -выходом фильтра, первый вход первого реле с зоной нечувствительности соединен с выходом интегратора, а вход фильтра соединен со вторыми входами первого и второго реле с зо- ной нечувствительности, отличающееся тем, что, с целью повышения точности, устройство содержит последовательно соединенные первый сумматор, блок определения амплитуды сигнала и второй сумматор, выход которого соединен со входом иНвертора, вторым входом коглмутатора и третьим входом логического блока, второй вход - с выходом интегратора, третий вход - с выходом фильтра и первым входом первого сумма.тора, второй вход которого соединен со входом фильтра. Источники информации, принятые.во внимание при экспертизе 1.Авторское свидетельство СССР № 391532, кл. G 05 В 11/16, 1971. 2.Авторское свидетельство СССР № 622045, кл. G 05 В 11/16, 1977 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Релейное управляющее устройство | 1978 |
|
SU771612A1 |
| Релейное управляющее устройство | 1979 |
|
SU800961A1 |
| Релейное управляющее устройство | 1977 |
|
SU622045A1 |
| Релейное управляющее устройство | 1981 |
|
SU1004965A1 |
| Релейное управляющее устройство | 1978 |
|
SU859999A1 |
| Релейное устройство управления | 1986 |
|
SU1335927A1 |
| ОДНОТАКТНЫЙ МНОГОЗОННЫЙ ИНТЕГРИРУЮЩИЙ ПРЕОБРАЗОВАТЕЛЬ | 2014 |
|
RU2549128C1 |
| Развертывающий усилитель | 1988 |
|
SU1508245A2 |
| Многоканальный регулятор | 1987 |
|
SU1532895A1 |
| УСТРОЙСТВО ДЛЯ УГЛОВОЙ СТАБИЛИЗАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 1990 |
|
SU1827987A1 |
Фиг. 2
