(54) РЕЛЕЙНОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО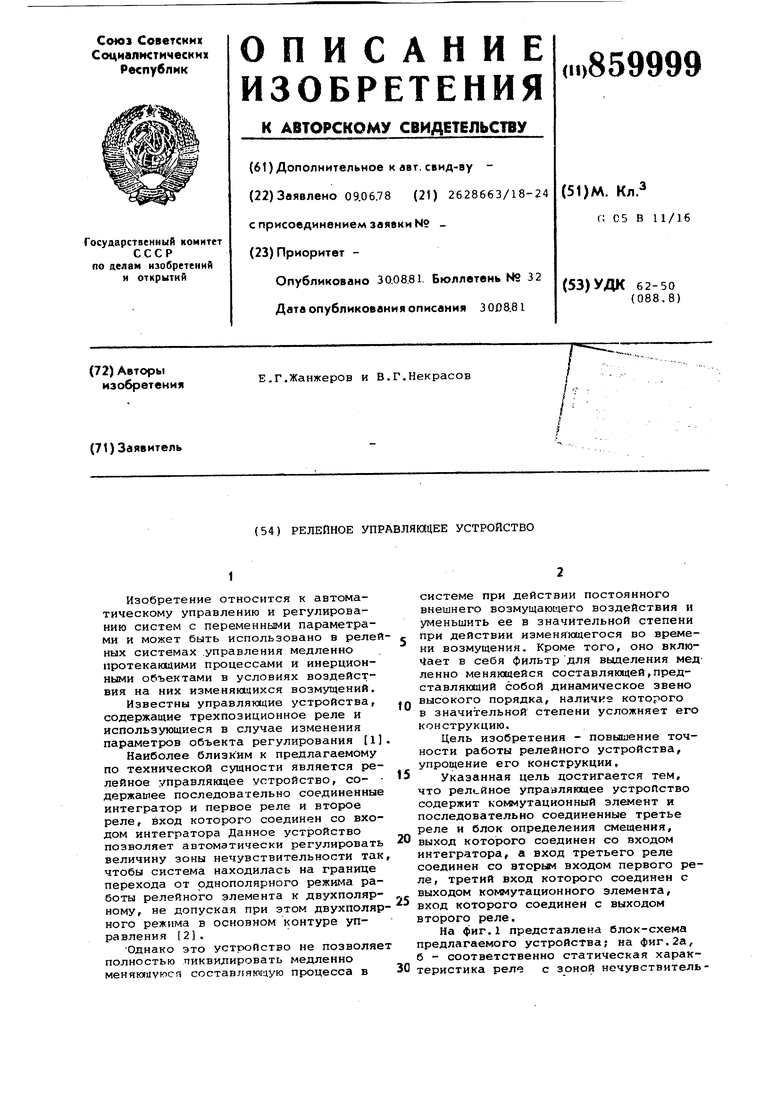
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УГЛОВОЙ СТАБИЛИЗАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 1990 |
|
SU1827987A1 |
| Релейное управляющее устройство | 1981 |
|
SU1004965A1 |
| Релейное управляющее устройство | 1979 |
|
SU800961A1 |
| Релейное управляющее устройство | 1978 |
|
SU771612A1 |
| Релейное управляющее устройство | 1979 |
|
SU849139A1 |
| Релейное устройство управления | 1986 |
|
SU1335927A1 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2391691C1 |
| КОМАНДНЫЙ БЛОК ДЛЯ ЭКСТРЕМАЛЬНОГО РЕГУЛЯТОРА | 2011 |
|
RU2475797C1 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2005 |
|
RU2284561C1 |
| Следящая система | 1981 |
|
SU962847A1 |
Изобретение относится к автоматическому управлению и регулированию систем с переменньоми параметрами и может быть использовано в релейных системах .управления медленно протекакщими процессами и инерционными объектами в условиях воздействия на них изменяющихся возмущений.
Известны управляющие устройства, содержащие трехпозиционное реле и использукициеся в случае изменения параметров объекта регулирования 1 .
Наиболее близким к предлагаемому по технической сущности является релейное управляющее устройство, со- держащее последовательно соединенные интегратор и первое реле и второе реле, вход которого соединен со входом интегратора Данное устройство позволяет автоматически регулировать величину зоны нечувствительности так, чтобы система находилась на границе перехода от рднополярного режима работы релейного элемента к двухполярному, не допуская при этом двухполярного режима в основном контуре управления 2 .
Однако это устройство не позволяет полностью ликвидировать медленно меняющуюся составляюгцую процесса в
системе при действии постоянного внешнего возмущающего воздействия и уменьшить ее в значительной степени при действии изменяющегося во времени возмущения. Кроме того, оно включает в себя фильтр для выделения медленно меняющейся составляющей,представляющий собой динамическое звено высокого порядка, наличие которого
to в значительной степени усложняет его конструкцию.
Цель изобретения - повышение точности работы релейного устройства, упрощение его конструкции,
15
Указанная цель достигается тем, что релейное управляющее устройство содержит коммутационный злемент и последовательно соединенные третье реле и блок определения смещения,
20 выход которого соединен со входом интегратора, а вход третьего реле соединен со вторы) входом первого реле, третий вход которого соединен с выходом коммутационного элемента,
25 вход которого соединен с выходом второго реле.
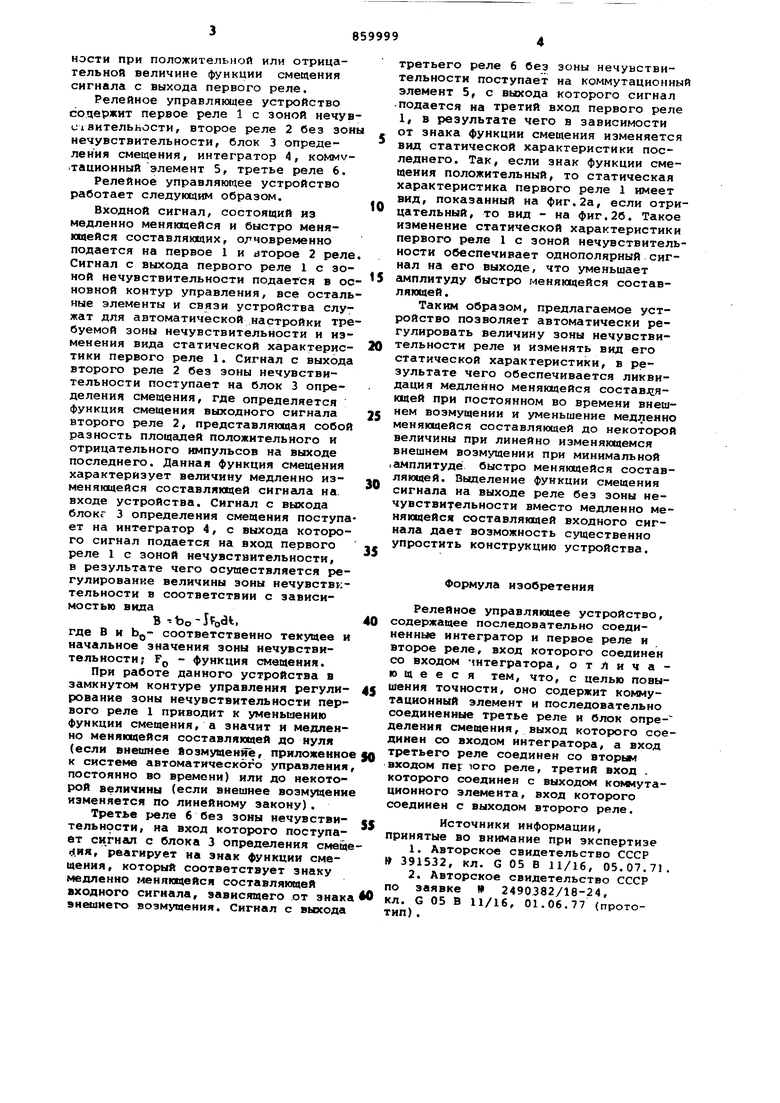
На фиг.1 представлена блок-схема предлагаемого устройства на фиг.2а, б - соответственно статическая характеристика реле с зоной нечувствительнэсти при положительной или отрицательной величине функции смещения сигнала с выхода первого реле.
Релейное управляющее устройство содержит первое реле 1 с зоной нечувствительности, второе реле 2 без зоны нечувствительности, блок 3 определения смещения, интегратор 4, KOMMV тационный элемент 5, третье реле 6. Релейное управляющее устройство работает следующим образом.
Входной сигнал, состоящий из медленно меняющейся и быстро меняющейся составляицих, одновременно подается на первое 1 и второе 2 реле. Сигнал с выхода первого реле 1 с зоной нечувствительности подается в основной контур управления, все остальные элементы и связи устройства служат для автоматической настройки требуемой зоны нечувствительности и изменения вида статической характ-еристики первого реле 1. Сигнал с выхода второго реле 2 без зоны нечувствительности поступает на блок 3 определения смещения, где определяется : функция смещения выходного сигнала второго реле 2, представляющая собой разность площадей положительного и отрицательного импульсов на выходе последнего. Данная функция смещения характеризует величину медленно изменяющейся составляющей сигнала на входе устройства. Сигнал с выхода блокг 3 определения смещения поступает на интегратор 4, с выхода которого сигнал подается на вход первого реле 1 с зоной нечувствительности, в результате чего осуществляется регулирование величины зоны нечувствительности в соответствии с зависимостью вида
В-Ъо-JFodt.
где В и Ьц- соответственно текущее и начальное значения зоны нечувствительности; FP - функция смещения.
При работе данного устройства в замкнутом контуре управления регулирование зоны нечувствительности первого реле 1 приводит к уменьшению функции смещения, а значит и медленно меняющейся составляющей до нуля (если внешнее возмущение, приложенно к системе автоматического управления постоянно во времени) или до некоторой величины (если внешнее возмущени изменяется по линейному закону).
Третье реле 6 без зоиы нечувствительности, на вход которого поступает си.гнал с блока 3 определения смещг1.ия, реагирует на знак функции смещения, который соответствует знаку медленно меняющейся составляющей входного сигнала, зависящего от знак внешнего возмущения. Сигнал с выхода
третьего реле б без зоны нечувствительности поступает на коммутационны элемент 5, с выхода которого сигнал подается на третий вход первого реле 1, в результате чего в зависимости от знака функции смещения изменяется вид статической характеристики последнего. Так, если знак функции смещения положительный, то статическая характеристика первого реле 1 имеет вид, показанный на фиг.2а, если отрицательный, то вид - на фиг,26. Такое изменение статической характеристики первого реле I с зоной нечувствнтельности обеспечивает однополярный сигнал на его выходе, что уменьшает амплитуду быстро меняющейся составляющей .
Таким образом, предлагаемое устройство позволяет автоматически регулировать величину зоны нечувствительности реле и изменять вид его статической характеристики, в результате чего обеспечивается ликвидация медленно меняющейся cocTaBjjHкщей при постоянном во времени внешнем возмущении и уменьшение медленно меняющейся составляющей до некоторой величины при линейно изменяющемся внешнем возмущении при минимальной .амплитуде быстро меняющейся составляющей. Выделение функции смещения сигнала на выходе реле без зоны нечувствительности вместо медленно меняющейся составляющей входного сигнала дает возможность существенно упростить конструкцню устройства.
Формула нзобретения
Релейное управляющее устройство, содержащее последовательно соединенные интегратор и первое реле и второе реле, вход которого соединен со входом чнтегратора, отличающееся тем, что, с целью повышения точности, оно содержит коммутационный элемент и последовательно соединенные третье реле и блок определения смещения, выход которого соедииен со входом ннтегратора, а вход третьего реле соединен со вторьм входом пер юго реле, третий вход . которого соединен с выходом KoienyTaционного элемента, вход которого соединен с выходом второго реле.
Источники информации, принятые во внимание при экспертизе
391532, кл. G 05 В 11/16, 05.07.71
кл. G 05 В 11/16, 01.06.77 (прототип) .
CD-СИНПЗ
Ч
4
