(54) УСТРОЙСТЮ УПРАВЛЕНИЯ ПРИВОДОМ КАНТОВАТЕЛЯ
БЛЮМИНГА
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухпозиционный электропривод кантователя блюминга | 1983 |
|
SU1088831A1 |
| Устройство программного управления приводом кантователя | 1981 |
|
SU1031545A1 |
| Устройство программного управленияпРиВОдОМ КАНТОВАТЕля ОбжиМНОгОРЕВЕРСиВНОгО пРОКАТНОгО CTAHA | 1978 |
|
SU795597A1 |
| Электропривод постоянного тока с двухзонным регулированием скорости валков клети прокатного стана | 1986 |
|
SU1411911A1 |
| Устройство управления гидроприводом механизма крана | 1989 |
|
SU1724956A1 |
| Многодвигательный электропривод | 1983 |
|
SU1280690A1 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЯ МАШИНЫ ПОСТОЯННОГО ТОКА | 2005 |
|
RU2281525C1 |
| Устройство управления электроприводом | 1983 |
|
SU1161920A1 |
| Бесконтактный командоаппарат | 1978 |
|
SU810529A1 |
| Бесконтактный командоаппарат управления прессом | 1985 |
|
SU1260249A1 |
1
Изобретение относится к системам автоматического управления электроприводами прокатного прюизводства, в частности к сисаемам автоматического управления приводами кантователя 5 блюминга.
Наиболее близкой к изобретению по технической сущности и достигаемому результату является система автоматического управления кантователем блю- 10 минга, содержащая электродвигатель с реверсивным преобразователем, систему импульсно-фазового управления, регулятор тока, один из выходов которого соединен с выходом датчика 15 тока, другой - с выходом регулятора ЭДС двигателя,, а выход - со входом системы нмпульсно-фазового управления, датчик ЭДС, выходы которого соединены с выходами датчиков тока и 20 напряжения, а выход - с одним из входов регулятора ЭДС, задатчик интенсивности, выход которого соединен с одним из входов регулятора ЭДС, а вход - с выходом устройства фазочув- 25 ствительного выпрямителя, сельсин-датчик, сочлененный с валом кривошипа кантователя и источник питания 1.
Недостатком этой системы является то, что ее настройка связана с рас- 30
соединением валов кривошипа механизма кантователя и сельсин-датчика, с подбором наиболее удачного сочленения этих валов методом проб и ошибок и требует значительной затраты времени.
Цель изобретения - упрощение процесса и повышение точности настрюйки.
Поставленная цель достигается тем, что в устройство, состоящее из электродвигателя с реверсивным преобразователем, системы импульсно-фазового упраьления, регулятора тока, один из входов которого соединен с выходом датчика тока, другой - с выходом регулятора ЭДС двигателя, а выход - со входом системы импульсно-фазового управления, датчика ЭДС, входы которого соединены с выходами датчиков тока и напряжения, а выход - с одним из входов регулятора ЭДС, задатчика интенсивности, выход которого соединен с одним из входов регулятора ЭДС, а вход - с выходом устройства фазочувствительного впрямления, сельсиндатчика, сочлененного через редуктор с валом кривошипа кантователя, источника питания, допо.гтнительно введены второй сельсин-датчик, переключатель, блок коррекции и бпок суммирования,
при этом обмотка возбуждения второго сельсин-датчика через переключатель соединеня с источником питания, выход блока коррекции соединен с первым входом блока суммирования, второй вход которого соединен с обмоткоП ротора первого сельсин-датчика, синхронизирующая обмотка которого через переключатель соединена с синхронизирующей обмоткой второго сельсин-датчика и через переключатель и нормально открытые контакты педального ко мандоаппарата - с источником питания, вход блока коррекции через переключатель и контакты педального командоаппарата соединен с источником питания, а выход блока суммирования соединен со входом устройства фазочувствительного выпрямителя.
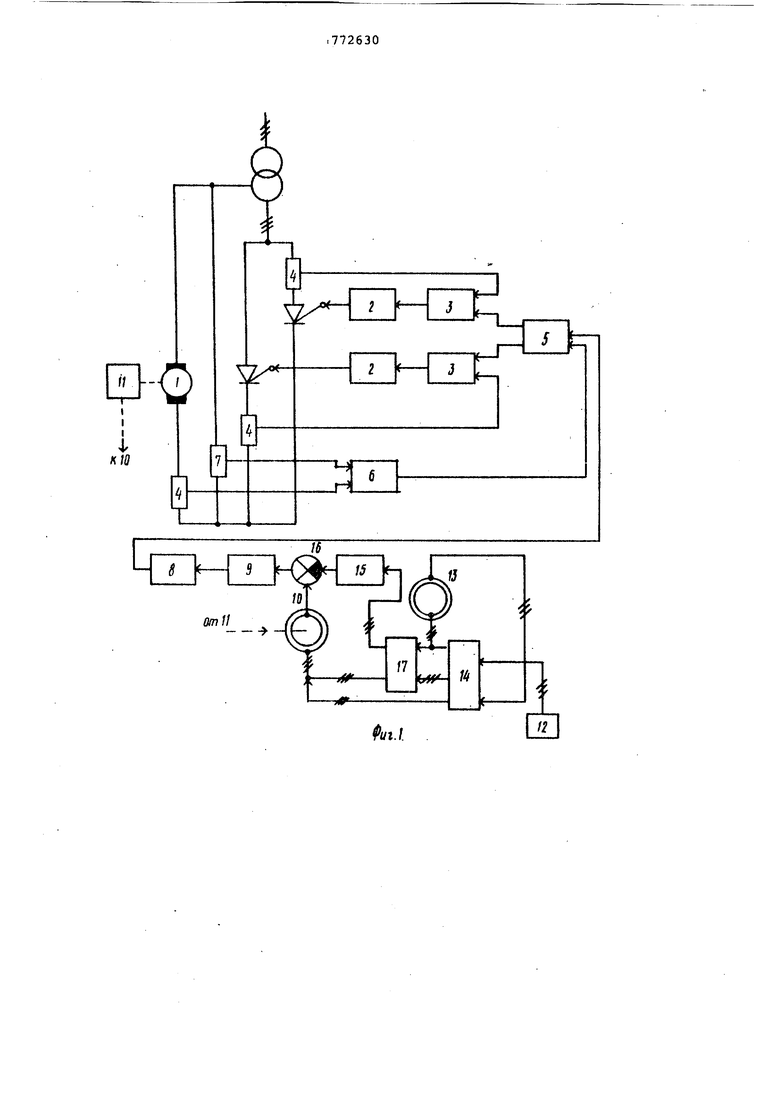
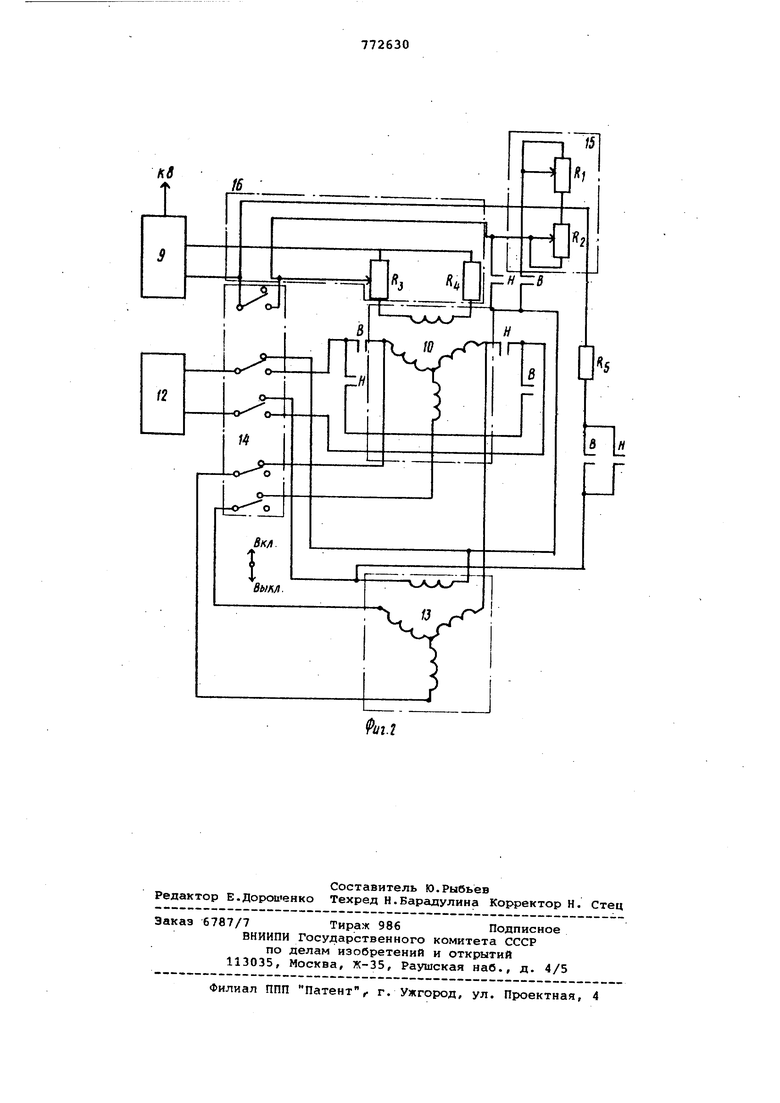
На фиг. 1 представлена блок-схема устройства управления приводом кантователя блюминга, на Фиг. 2 - принципиальная схема соединений отдельных элементов.
Устройство содержит электродвигатель 1 с реверсивным преобразователем систему 2 импульсно-фазового управления, регулятор 3 тока, один из входов которого соединен с выходом датчика 4 тока, другой - с выходом регулятора 5 ЭДС двигателя, а выход со входом системы 2 импульсно-фазового управления, датчик 6 ЭДС, входы которого соединены с выходами датчиков 4 и 7 тока и напряжения, соответственно, а выход - с одним из входов регулятора 5 ЭДС, задатчик 8 интенсивности, выход которюго соединен с одним из входов регулятора 5 ЭДС, а вход - с выходом устройства 9 фазочувствительного выпрямления, сельсиндатчик 10, сочлененный с валом двигателя 1 через редуктор 11, источник 1 питания; Кроме того, устройство содержит сельсин-датчик 13, обмотка возбуждения которого через переключатель 14 соединена с источником 12 питания, блок 15 коррекции, выход которого соединен с блоком 16 суммирования, с другим входом которого соединена обмотка ротора сельсин-датчика 10, синхронизирующая обмотка которого через переключатель 14 соединена с синхронизирующей обмоткой сельсин-датчика 13 и через контакты педального командоаппарата 17 с источником 12 питания, вход блока 15 коррекции через переключатель 14 соединен с источником 12 питания, вход блока коррекции через контакты педального командоаппарата 17 соединен с обмоткой возбуждения сельсин-датчика 13.
Устройство работает следующим Образом.
Положение вала кривошипа кантователя устанавливается путем поворота рукоятки ручной настройки, сочлененной с сельсин-датчиком 13 через редуктор с передаточным отношением равным 82.
Блок 15 коррекции образует резисторы R и R2 соединенные черюз контакты В и Н параллельно обмотке рото, ра сельсин-датчика 13. Падение напряжения на резисторе R определяет верхнее положение крючьев (крючья утоплены в пазах линейки манипулятора) , а падение напряжения на резисторе Rj определяет нижнее положение
крючьев (расстояние от крючьев до
раската должно быть не более 35-40 мм).
Устойчивое нижнее положение крючьев определяется напряжением ротора сельсин-датчика 10, равным ему
5 по величине,но противоположным по знаку напряжением на выходе блока 15 коррекции. Устойчивому нижнему положению соответствует замкнутое состояние контактов Н.
0 При замыкании контактов В, что осуществляется путем воздействия на педальный командоаппарат, напряжение, снимаемое с ротор.а сельсин-датчика 10,
складывается с напряжением, на выхо5 Де блока 15 коррекции. Механизм отрабатывает угол с 120 сельсин-датчика 10, что соответствует повороту вала кривошипа на 180. При достижении крючьями верхнего положения наQ пряжение на выходе блока 15 коррекции компенсирует напряжение на выходе сельсин-датчика 10.
При замыкании Контактов Н весь процесс повторяется.
C Регулировку угла поворота вала кривошипа производят путем изменения напряжения на резисторе, причем снижение этого напряжения приводит к уменьшению угла поворота ваяг. сельсин-датчика 10.
0 Напряжение на выходе блока 15 коррекции не должно npeBtjmaTb о 0,37 Чипах wax. максимальное напряжение на делителе из резисторов R ,1 и R, соответствую1чёе напряжению 5 на выходе сельсин-датчика 10.
Если напряжение на выходе блока 15 коррекции равно 0,87 , то это означает, что вал сельсин-датчика 10 от положения О повернулся на 60 и 0 регулирование интенсивности путем передвижения движка на резисторе R- изменяющее запрещается. Изменение интенсивности отработки задания должно производиться задатчиком 8 сг интенсивности.
Собственный О сельсин-датчика 10 соответствует положению, отрабатываемому механизмом кантователя, если на ротор сельсин-датчика 13 подать напряжение от источника 12 питания. 0 Напряжение на выходе блока 15 коррекции при этом отсутствует. Крючья кантователя в этом случае остановятся в среднем положении.
Угол поворота кривошипа должен 5 быть несколько меньше leo, так как в нижнем положении крючья не должны доходить до конца, В противном случа вследствие значительного расстояния от крючьев до раската при работе кан тователя возможны большие линамические. удары, что может привести к поломкам. Для регулирования нижнего положения крючьев при замкнутых контактах Н необходимо пользоваться ротором сельсин-датчика 13, а для регулирования верхнего положения - регулируе мым резистором. Предлагаемое устройство позволяет повысить точность настройки, причем настройку производить непосредственн с пульта управления и, в случае необходймости - во время работы стана без потери времени. Формула изобретения Устройство управления приводом ка тователя блюминга, состоящее из элек тродвигателя с реверсивным преобразо вателем, системы импульсно-фазового управления, регулятора тока, один из входов которого соединен с выходом датчика тока, другой - с выходом регулятора ЭДС, а выход - со входом системы импульсно-фазового управления, датчика ЭДС, входы которого сое динены с выходом датчиков тока и напряжения, а выход - с из входо регулятора ЭДС, задатчика интенсивности, выход которого соединен с одним из входов регулятора ЭДС, а вход с выходом устройства фазочувсгвительного выпрямителя, сельсин-датчика, сочлененного через редуктор с валом кривошипа кантователя, источника питания и педального командоаппарата, отличающееся тем, что, с целью упрощения процесса и повышения точности настройки, в него дополнительно введены второй сельсин-датчик, переключатель, блок коррекции и блок суммирования, при этом обмотка возбуждения второго сельсин-датчика через переключатель соединена с источником питания, выход блока коррекции соединен с первьич входом блока суммирования, второй вход которого соединен с обмоткой ротора первого сельсин-датчика, синхронизирующая обмотка которого через переключатель соединена с синхронизирующей обмоткой второго сельсин-датчика и через пе-. реключатель и нормально открытые контакты педального командоаппарата - с источником питания, вход блока коррекции через переключатель и контакты педального командоаппарата соединен с источником питания, а выход блока суммирювания соединен со входом устройства фазочувствительного выпрямителя. Источники информации, принятые во внимание при экспертизе 1. Технический проект № ОЛА.082.707 Электропривод и автоматика блюминга 1300 ЗСМЗИ, т. XIX. М., ВНИИэлектропривод, 1966,
