Изобретение отйосится к автоматическому управлению приводом вспомагательных механизмов прокатного стана и может быть примейено, в частности, в системах програмного управления приводом кантователя обжимнык реверсивных прокатных станов.
Известна система управления приводом кантователя обжимного прокатного стана,-которая содержит последовательно соединенные командоаппарат, регулятор положения, задатчик интенсивностн, регуляторы и датчики ско-рости, тока и напряжения, тиристорны преобразователь, электродвигатель. Выход датчика скорости соединен с входом регулятора скорости, выход датчика тока - с входом регулятора тока. На второй вход регулятора напряжения поступает сигнал, .пропорциональный текущему значению напряжения тиристорного преобразователя til
Как известно, кантователь пред- ставляет- из себя механизм, работаю-, щии с ударным приложением -нагрузки. Технологические условия работы кантователя с минимальными ударными нагрузками .требуют, чтобы технологический зазор V расстояние от крайнего нижнего положения крючьев кантователя до уровня рабочего рольганга был н более 35 мм. При этом зазоре обеспечивается необходимая скорость встречи крючьев кантователя с раскатом, равная 0,4 - 0,45 м/с. Однако в процессе кантовки раскатов происходитинтенсивный износ деталей кантователя, вследствие чего технологический зазор увеличивается до 120 - 150 мм. С увеличением технологического зазора скорость встречи изменяется от 0,4 до 1,1 м/с.
Недостатком данной системы является то, что она не обеспечивает по мере увеличения технологического зазора необходимую величину скорости встречи крючьев с раскатом, что в свою очередь приводит к увеличению динамических нагрузок в деталях и их интенсивному износу.
Наиболее близким к предлагаемому по технической сущности и достигаемому результату является устройство программного управления приводом кантователя обжимного реверсивного прокатного стана, содержащее последовательно соединенные командоаппарат, регулятор положения, задатчик интенсивности, регуляторы соответственно скорости, тока и напряжения, тиристорный преобразователь напряжения с системой импульсно-фазового управле.ния. Выход датчика тока соединен с входами регулятора тока и блока контроля приложения и сброса нагрузки. - Выход датчика скорости соединен с |Входами регулятора скорости и блока вычисления рабочей скорости ьстречи
крючьев кантователя с раскатом и блоком вычисления рабочей скорости отрыва крючьев кантователя от раската. Выход датчика положения соединен с входом блока определения начала торможения. Входы блока выработки и выдачи сигнал ограничения с переключением сигнала ограничения соединены с выходами блоков контроля приложения и сброса нагрузки, вычисления рабочей скорос ти встречи и отрыва крючьев кантователя с раскатом, а выходы названного блока через переключающее устройство подсоединены к входам задатчика интенсивности и регулятора скорости. Выход блока определения начала торможения соединен с входом регулятора положениям
Устройство программного управления формирует сигналы на разгон с заданным ускорением привода кантователя до расчетной скорости встречи крючьев кантователя с раскатом, на достижение кантователем расчетной скорости, обеспечивающей докантовку раската после отрыва егЙ от крючьев, и на установление скорости кантователя после кантовки для плавного торможения Электродвигателя.. Для реализации этого режима применено устройство, содержащее блок вычисления рабочей скорости встречи крючьев кантователя с раскатом, блок выработки и выдачи сигнала ограничения, блок контроля приложения и сброса нагрузки, блок вычисления рабочей скорости отрыва крючьев кантователя от раската, блок определения момента начала торможения и блок выработки и выдачи сигнала ограничения с переключением сигнала ограничения, сигнал которого поступает на вход1 задатчика интенсивности с. регулятора скорости 2 .
Устройство обеспечивает необходимую скорость встречи крючьев кантователя с раскатом, однако по мере увеличения технологического зазора увеличивается путь, проходимый крюком кантователя из крайнего нижнего положения до встречи с кантуемглм раскатом. В существующей системе технологический зазор не конторолируется, не измеряется, а процесс разгона электропривода кантователя при всех величинах зазора осуществляется с постоянной величиной ускорения. Поэтому при принятой тахограмме движения привода кантователя с увеличением технологического зазора увеличивается время, неодходимое для выбора зазора.
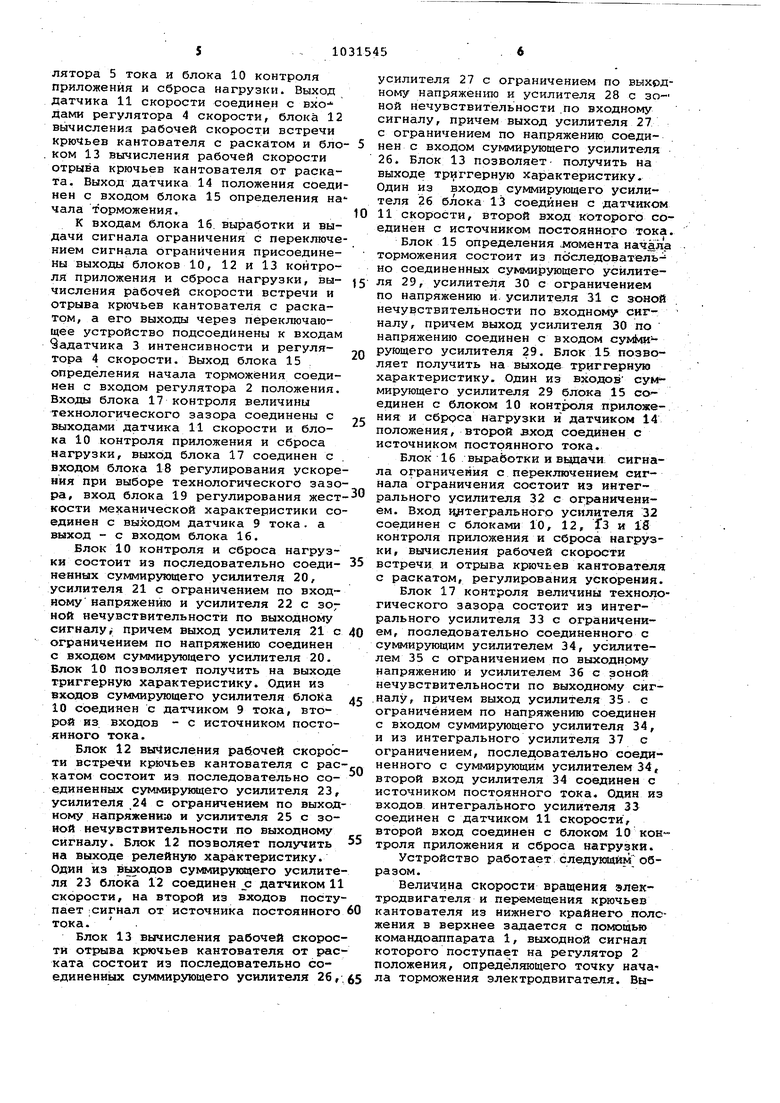
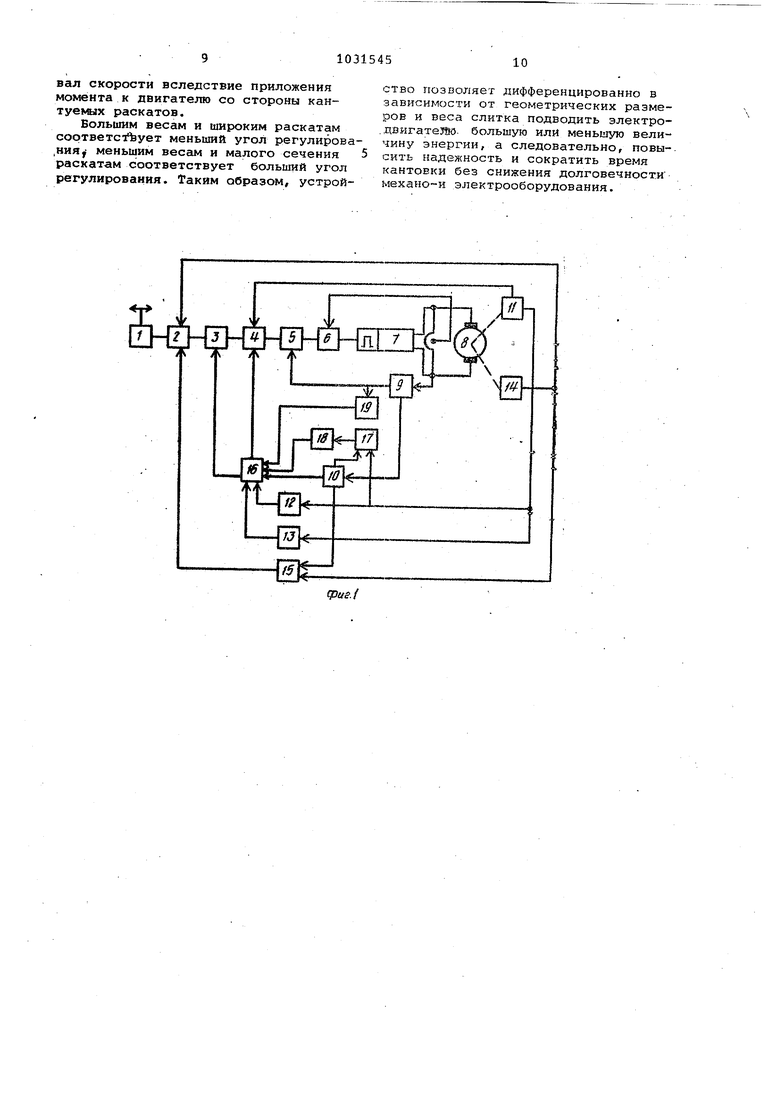
Кроме того, при кантовке одного раската с больш11М: пЬперечй№1 сечением или шириной по сравнению с кантуемым раскатом вйлЪго. поперечного сечения или ширины усилие на крюке, а следовательно, и статический момент сопротивления на двигателе раз|пичны. Увеличение, момента сопротивления на валу двигателя при кантовке широких раскатов и раскатов с большим поперечным сечением приводит 1к увеличению тока якорной цепи, к увеличению падения напряжения в дополнительных сопротивлениях якорной цепи (сглаживающих дросселях, в об.мотках питающего трансформатора тиристорного преобразователя,) , Это в свою очередь приводит к уменьшению напряжения на якоре двигателя а следовательно, к уменьшению fnpoBa-riy скорости двигателя в процессе кантов ки, которое системой подчиненного регулирования не компенсируется. Таким образом, процесс кантовки слит ка осуществляется не с расчетной (номинальной) скоростью, а со скоростью понижен ной, ч то приводит к увели чению времени кантовки,Особенно больт шая величина цровала скорости (до 40 - 50% от номинальной J имеет место при одновременной кантовке двух раскатов .. Увеличение времени выбора зазора вследствие указанных причин и увеличе{Ние времени самого процесса кантовки приводит к увеличен зю суммарного времени работы кантователя, увеличению времени цикла ;кантовки, а следовательно, к некоторому уменьшенто производительности стана. Как показали экспериментальные исследования, провал скорости в процессе кантовки может приводить к расцеплению раската с крюком, а следовательно, и к срыву кантовки, т.е. к уменьшению надежности кантовки. Цель изобретения - сокращение вре мени цикла кантовки, повышение надеж ности процесса кантовки без снижения долговечности механо-и электрообору,дования путем дифференцированной пере дачи энергии электродвигателю кантователя в процессе кантовки в зависи.мости от геометричес их размеров и веса раската и регулирования ускорения электродвигателя в процессе выбора изменяющегося технологического зазора. Поставленная цель достигается тем что устройство nporpaNMHoro управления приводом кантователя обжимно;го реверсивного прокатного стана, содержащее командоаппарат, задатчик интенсивности и систему подчиненного регулирования, включающую контур регулирования положения с датчиком и регулятором положения, контур регулирования скорости с датчиком и регулятором скорости, контуры регулиро вания тока и напряжения соответственно с датчиком и регуляторами тока и напряжения, тиристорный преобразователь с системой импульс.но-фазового управления, электродвигатель, блок . вычисления рабочей скорости встречи i крючьев кантователя с раскатом, бло1 выработки и выдачи сигнала ограниче-, ния, блок контроля приложения и сброса нагрузки, блок вычисления рабочей скорости отрыаа крючьев кантователя от раската, блок определения момента начала торможения, при этом выход датчика скорости одновременно соединен с выходами блока вычисления рабочей скорости встречи крючьев кантователя с раскатом и блока вычисления рабочей скорости отрыва крючьев кантователя от раската, выход датчика тока соединен с входом блока контроля приложения и сброса нагрузки, выход датчика положения соединен с в.ходом блока определения момента начала торможения, выход . . блока контроля приложения и сброса нагрузки соединен с входами блока . . определения момента начала торможения и блока выработ-.чи и выдачи сигнала ограничения, выходы блока вычисления рабочей скорости встречи крючьев кантователя с раскатом и блока вычисления рабочей скорости отрыва крючьев, кантователя от раската через блок выработки и выдачи сигнала бграничения соединены, с входами задатчика интенсивности и регулятора скорости, выход блока опре/(еления момента начала торможения соединеи с входом регулятора положения, дополнительно содержит блок контроля величины технолохического зазора, блок регулирования ускорения, блок регулирования жесткости механической характеристики, причем первый вход блока контроля величины технологического зазора со единен с выходом датчика скорости, второй вход - с выходом блока контроля приложения и сброса нагрузки, выход блока контроля величины технологического зазора соединен с выходом блока регулирования ускорения, выход датчика тока соединен с входом блока регулирования жесткости механической характеристики, выходы указанного блока и блока регулирования ускорения соединены с входом блока выработки и выдачи сигнала ограничения с переключен.ием сигнала ограничения. На фиг. 1 представлена блок-схема устройства програмного управления приводом кантователя на фиг. 2 блок-схема .сГтдельных блоков, входящих в устройство. Устройство содержит последовательно соединенные командоаппарат 1, регулятор 2 положения, згщатчик 3 интенсивности, регуляторы 4, 5 и б соответственно скорости, тока и напряжения, тиристорный преобразователь 7 напряжения с системой импульсно-фазового управления. Для усиления сигнала, пропорционального току двигателя 8, применен датчик 9 тока. Выход датчика 9 тока соединен с входами регулятора 5 тока и блока 10 контроля приложения и сброса нагрузки. Выход датчика 11 скорости соединен с вхо дами регулятора 4 скорости, блока 12 вычисления рабочей скорости встречи крючьев кантователя с раскатом и блоком 13 вычисления рабочей скорости отрыва крючьев кантователя от раската. Выход датчика 14 положения соеди нен с входом блока 15 определения на чала торможения, К входам блока 16. выработки и выдачи сигнала ограничения с переключе нием сигнала ограничения присоединены выходы блоков 10, 12 и 13 контроля приложения и сброса нагрузки, вычисления рабочей скорости встречи и отрыва крючьев кантователя с раскатом, а его выходы через переключающее устройство подсоединены к входам 9г1датчика 3 интенсивности и регулятора 4 скорости. Выход блока 15 определения начала торможения соединен с входом регулятора 2 положения, Входы блока 17 контроля величины технологического зазора соединены с выходами датчика 11 скорости и блока 10 контроля приложения и сброса нагрузки, выход блока 17 соединен с входом блока 18 регулирования ускоре ния при выборе технологического зазо ра, вход блока 19 регулирования жест кости механической характеристики со единен с выходом датчика 9 тока. а выход - с входом блока 16, Блок 10 контроля и сброса нагрузки состоит из последовательно соединенных суммирующего усилителя 20, усилителя 21 с ограничением по входному напряжению и усилителя 22 с зоной нечувствительности по выходному сигналуj причем выход усилителя 21 с ограничением по напряжению соединен с входом суммирующего усилителя 20, Блок 10 позволяет получить на выходе триггерную характеристику Один из входов суммирующего усилителя блойа 10 соединен с датчиком 9 тока, второй из входов - с источником постоянного тока. Блок 12 вычисления рабочей скорос ти встречи крючьев кантователя с рас катом состоит из последовательно соединенных суммирующего усилителя 23, усилителя 24 с ограничением по выход ному напряженна) и усилителя 25 с зоной нечувствительности по выходному сигналу. Блок 12 позволяет получить на выходе релейную характеристику. Один из выходов суммируквдего усилите ля 23 блока 12 соединен с датчиком 1 скорости, на второй из входов посту пает ;сигнал от источника постоянного токаБлок 13 вычисления рабочей скорос ти отрыва крючьев кантователя от рас ката состоит из последовательно соединенных суммирующего усилителя 26, усилителя 27 с ограничением по выходному напряжению и усилителя 28 с зоной нечувствительности .по входному сигналу, причем выход усилителя 27 с ограничением по напряжению соединен с входом суммирующего усилителя 26. Блок 13 позволяет- пoлsчить на выходе триггерную характеристику. Один из входов суммирующего усилителя 26 блока 13 соединен с датчиком 11 скорости, второй вход которого соединен с источником постоянного тока. Блок 15 определения .момента начала торможения состоит из последовательно соединенных суммирующего усилителя 29, усилителя 3D с ограничением по напряжению и. усилителя 31 с зоной нечувствительности по входному сигналу, причем выход усилителя 30 по напряжению соединен с входом сумМирующего усилителя 29, Блок 15 позволяет получить на выходе триггерную характеристику. Один из входов суМ мирующего усилителя 29 блока 15 соединен с блоком 10 приложения и сброса нагрузки и датчиком 14 положения, второй вход соединен с источником постоянного тока. Блок 16 выработки и выдачи, сигнала ограничения с переключением сигнала ограничения состоит из интегрального усилителя 32 с ограничением. Вход Щ1тегральногр усилителя 32 соединен с блоками 10, 12, Гз и IS контроля приложения и сброса нагрузки, вычисления рабочей скорости встречи и отрыва крючьев кантователя с раскатом, регулирования ускорения. Блок 17 контроля величины технологического зазора состоит из интегрального усилителя 33 с ограничением, последовательно соединенного с суммирующим усилителем 34, усилителем 35 с ограничением по выходному напряжению и усилителем 36 с зоной нечувствительности по выходному сиг.налу, причем выход усилителя 35. с ограничением по напряжению соединен с входом суммирующего усилителя 34, и из интегрального усилителя 37 с ограничением, последовательно соединенного с суммирующим усилителем 34, второй вход усилителя 34 соединен с источником постоянного тока. Один из входов интегрального усилителя 33 соединен с датчиком 11 скорости, второй вход соединен с блоком 10 контроля приложения и сброса нагрузки. Устройство работает следующим образом. Величина скорости вращения электродвигателя и перемещения крючьев кантователя из нижнего крайнего положения в верхнее задается с помощью командоаппарата 1, выходной сигнал которого поступает на регулятор 2 положения, определяющего точку начала торможения электродвигателя. Выходной сигнал регулятора.положения подается на вход задатчика 3 йнтен, сивности. На второй вход задатчика интенсивности поступает сигнал из блока 16 выработки и вьшачи сигнала ограничения с переключением сигнала ограничения для обегспечения равенства текущей скорости с расчетной,т.eft, кпя контроля постоянной скорости встречи крючьев с раскатом. Выходной . сигнал зада:тчика 3 интенсивности, V иэменяющийся по линейному закону, поступает йа вход регулятора скорости для регламентации величины; ускореняя. На другие входы peryjfiTopa скорости поступают сигнала от блока 16 15 и да1:чика 11 скорости, определяющего действительное значение скорости. электродвигателя 8. Выходной сигнал регулятора 4 скорости, ропорциональшлй рассогласованию между заданным к 20 дей з-твительным значениями скорости электродвигателя, поступает на вход регулятора 5 тока, задавая величину тока электродвигателя. Выходной сигнал регулятора тока Лкак результат 25 сравиения заданного и фактического значения тока ) воздействует через регулятор 6 напряжений на систему илетульсно-фазового управления тиристорным преобразователем 7, обеспечи- ,Q вая плавный подъем выпрямленного напряжения с темпом, определяемым задатчиком 3 ийтенсив ности. Напряжение с тиристорного преобразователя подается на якорь двигателя 8. Двигатель начинает разгонят- ся с ускорением, задаваемым зада чйком интенсивности:. Сигнал, пропор.ционалыгай скорости двигателя., поступает в блок 17, на второй.вход которого поступает сигнал с выхода блока 40 10 контроля приложения и сброса нагрузки. С момента времени, когда скорость нзменгшась от своего нулевого значения (двигатель пошел в
ход V и до момента времени когда в 45 блок 17 поступит сигнал от блока 10, при каждой операции кантовки сигнал напряжения,пропорциональньай скорости двигателя, преобразуется в блоке 17 IB пузь, который проходит крюк KaHTOB-jQ вателя из крайнего нижнего положения до его зацепления с кантуемым раскатом. Этот путь запоминается в блоке 17, информация о его величине сохраняется до следующей операции кантов- ки. Определенной величине технологи- ческого зазора соответствует определённая , величина ускорения.
При последующей кан-говке наряду .
с измерением величины технологичес- 60
кого зазора осуществляетсясравнение, эё с величиной зазора,измеренной в .процессе предыдущей кантовки.Бели в
результате сравнения окажется, что , .
технологический зазор не изменился, 5
сигнала из блока.17 на изменение уставки ускорения в блок 18 в следующей за последующей кантовке не выдаётся, .поэтому сигнал на выходе блока 16, поступающий на один из входов задатчика 3 интенсивности, оказывается равным величине, имевшей место до операции сравнения зазоров при прёд дущей и последующей операциях кан- товки..
Электродвигатель разгоняется до расчетной скорости встречи крочьев кантователя с раскатом с прежним т емпом ускорения. При достижении текущей скоростью двигателя, значения равного расчетной, на выходе блока 12 появляется сигнал, поступающий . на вход блока 16, в результате чего управляющие сигналы с выхода блока 16 воздействуют на датчик 3 интенсивности и регулятор 4 ско ррсти, обеспеча вая. заданную расчетн .скорость встречи, тем самым обеспечивая запрет на дальнейший рост скорости. В момент соприкосновения крючьев кавто вателя с раскатом на выходах блоков 10 и 19 появляются сигналы напряжения, пропорциональные статической составляквдей тока двигателя. Один из упомянутых сигналов с выхода бло ка 10, пройдя через блок 16, снимает запрет на ограничение заданной скорости, а второй - с вЕВсода блока 19 (также через блок 16 увеличивает напряжение сигнала на входе регуля тора скорости. Увеличенный снгиал , с выхода регулятора скорости поступает через регулятор тока и напряжения на вход системы импульсно-фазовогО управления, что приводит к уменьшению угла регулирования тиристорного преобразователя, а следовательно, к увеличению напряжения на его выходе.
Увеличение напряжения на выходе тиристорного преобразователя приводит к увеличению .напряжения на якоре iдвигателя, что в свою очередь приводит к увеличению скорости двигателя и уменьшению провала скоростей по сравнению с ранее расмотренными сиотемой и устройством. При кантовке широких раскатов или одновременно двух слитков на бочке момент на двигателе кантователя намного больше, чем при кантовке раскатов малого сечения. В этом случае сигнал напряжения на выходе блока 10 имеет боль,ШУЮ величину. Это приводит к увеличению напряжения на входе регулятора скорости, поступающего с выхода блока 16,- что приводит к большому уменьшению угла регулирования тиристорнб го преобразователя, к бблыдему увеличению напряжения на якоре двигателя, чем при кантовке раскатов малого се.чения, В результате -большего увеличения напряжения, подводимого к яко- рю двигателя, и компенсируется провал скорости вследствие приложения момента к двигателю со стороны кантуемых раскатов.
Больашм весам и широким раскатам соответствует меньший угол регулирова,мияу- меньшим весам и малого сечения 5 раскатам соответствует больший угол регулирования. Таким образом, устройство позволяет дифференцированно в зависимости от геометрических размеров и веса слитка подводить электро.двигатейо большую или меньшую величину энергии, а следовательно, повысить надежность и сократить время кантовки без снижения долговечности механо и электрооборудования.


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство программного управленияпРиВОдОМ КАНТОВАТЕля ОбжиМНОгОРЕВЕРСиВНОгО пРОКАТНОгО CTAHA | 1978 |
|
SU795597A1 |
| Способ автоматического управления процессом кантовки раската | 1974 |
|
SU498992A1 |
| Двухпозиционный электропривод кантователя блюминга | 1983 |
|
SU1088831A1 |
| Устройство управления приводом кантователя блюминга | 1978 |
|
SU772630A1 |
| Способ регулирования размеров проката на непрерывных преимущественно проволочных и мелкосортных станах | 1981 |
|
SU1005971A1 |
| Система автоматического формирования режима захвата обжимного стана | 1983 |
|
SU1130424A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ КОЛЕСА С ПОВЕРХНОСТЬЮ АЭРОДРОМНЫХ И ДОРОЖНЫХ ПОКРЫТИЙ | 2008 |
|
RU2369856C1 |
| Подъемно-опускающийся стол | 1982 |
|
SU1066686A1 |
| Устройство для ограничения динамических усилий в канатах экскаватора | 1977 |
|
SU609848A1 |
| Способ автоматического управления электроприводом центрифуги и устройство для его осуществления | 1984 |
|
SU1292842A1 |
УСТРОЙСТВО ПРОГРАММНОГО УПРАВЛЕНИЯ ПРИВОДОМ. КАНТОВАТЕЛЯ обжимного реверсивного прокатного стана, содержащее командоаппарат, задатчик интенсивности и систему подчиненного ,регулирования, включающую КОНТУР ре- гулирования положения с датчиком и регулятором положения, контур регулирования скорости с датчиком и регулятором скорости, контуры регулирова.ния тока и напряжения соответственно с датчиком и регуляторами тока и напряжения, тиристорный преобразователь с системой импульсно-фазового управления , электродвигатель, блок вычисления рабочей скорости встречи крючьев кантователя с раскатом, блок выработки и ВБщачи сигнала ограничения, блЬк контроля приложения и сброса нагрузки блок вычисления рабочей скорости отрыва крючьев кантователя от раската, блок определения момента начала торможения, при этом выход датчика скорости одновременно соединён с входами блока вычисления рабочей скорости ; встречи крючъев кантователя с раскатом и блока вычисления рабочей скорости отрыва крючьев кантователя от рас.,выход датчика тока соединен с вхо;Дом блока контроляприлбжения и сброса нагрузки,выход датчика положения соединен с входом блока определения момента начала торможения, выход блока контроля приложения и сброса нагрузки соединен с входами блока определения момента начала торможения и блока выработки й выдачи сигнала ограничения, выходы блока вычисления рабочей скорости встречи крючьев кантователя с раскатом и блока вычисления рабочей скорости отрыва крючьев кантователя от раската через блок выработки и выдачи ;сигнала ограничения соединены с входами задатчика интенсивности и регулятора скорости, выход блока определения «. момента начала торможения соединен с входе регулятора положения, о тлишающееся тем, что, с Ц1елью гговыаения надежности и coKpai ния времени кантовки без снижения долговечности механо-и электрообору-I дования, оно дополнительно содержит 2 блок контроля величины технологического зазора, блок регулирования уско рения, блок регулирования жёсткости механической характеристики, причем первый вход блока контроля величины СО СП технологического зазора соединен с выходом датчика скорости, второй его вход - с ВЫХОДСЯ4 блока контроля приприложения и сброса нагрузки, выход 4 СП блока контроля величины технологического зазора соединен свходом блока регулирования ускорения, выход датчика тока соединен с входом блока регулирования жёсткости механической характеристики, выходы блока регулигрования жесткости механической харак теристики и блока регулирования уско рения соединены с входом блока выработки и выдачи сигнала ограничения с переключением сигнала ограничения.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Главные приводы | |||
| Механизмы .стана | |||
| Регулируемые приводы | |||
| Принципиальные схемы | |||
| Технический проект, ГПИ Тяжпромэлектропроект, Свердловское отделение, № С17647-1, 1973 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство программного управленияпРиВОдОМ КАНТОВАТЕля ОбжиМНОгОРЕВЕРСиВНОгО пРОКАТНОгО CTAHA | 1978 |
|
SU795597A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
