Изобретение относится к системе автО маткческого управления приводом вспомо гательных механизмов прокатного стана и может быть применено, в частности, в системах управления приводом кантователя обжимных реверсивных прокатных станов горячей прокатки. Наиболее близкой к предлагаемому устройству пр технической сущности и достигаемому результату является сис1 ма автоматического управления и регулирования приводом кантователя обжимного реверсивного прокатного стана, выполненная по принципу подчиненного регу лирования. Эта система содержит последовательно соединенные командоаппарат регулятор положения, задатчик интенсивн сти, регуляторы и датчики скорости, тока и напряжения тиристорный преобразовате напряжения для питания 19 иводного Дви- гателя кантователя, датчики скорости, тока и напряжения. Выход датчика скорости, в качестве которого служит тахогенератор, соединен со входом регулятора скорости, выход датчика тока - со входом регулятора тока,.- На.второй вход регулятора напряжения поступает сигнал, пропорциональный текущемузначеншо напряжения тиристорного преобразователя. Технологические условия работы кантователя с минимальным приложением нагрузки требуют, чтобы технологический зазор (расстояние от крайнего нижнего положения крючьев кантователя до уровня рабочего рольганга) был равен 35 мм. При задании зазора обеспечивается необходимая скорость встречи крючьев с раскатом, равная .4-0,45м/свк. Однако в процессе кантовки раската происходит интенсивный износ конструкционных деталей кантователя (втулка двухплечевого рычага, вкладыш коленчатого вала, втулка и ось крюка, коленчатый вал и т.д.). Вследствие этого технологический зазор изменяется от 35 до 120 мм. 37955 Эксп9рименталь 1ые исследования технологических нагрузок в кожтрукционных деталях показали различия скорости встречи крючьев кантователя с раскатом, В зависимости от технологического зазора, изме- j няющегося от 35 до 12О мм, скорость встречи изменяется от 0,4 до 1,О5м/сек. Ссновным недостатком данной системы является то, что вследствие изменения технологического зазора и повышения ско- о рости встречи крючьев с раскатом в конструкционных деталях кантователя возника-ют значительные динамические нагрузки, приводящие к интенсивному износу механического и- электрического оборудования is
механизма и сокращению его долговечности .
Цель изобретения - повышение долговечности механического и электрического оборудования кантователя, сокращение вре- зо чи
мени текущих ремонтов, повыщение надежности кантовки без снижения произ водительности прокатного стана.
Поставленная цель достигается тем, что устройство программного управления приводом кантователя, содержащее последовательно соединенные командоаппарат, задатчик интенсивности и систему подчиненного регулирования, включающую контур регулирования положения с датчиком и регулятором положения, контур регулирования скорости с датчиком и регулятором скорости, контуры регулирования тока и напряжения соответственно с датчиками и регуляторами тока и напряжения, дополнительно содержит блок Вычисления рабочей скорости встречи крючьев кантователя с раскатом, блок контроля текущей скорости крючьев кантователя, блок выработки и выдачи сигнала ограничения, блок контроля приложения и сброса нагрузки, блок вычисления скорости отрыва крючьев кантователя от раската, блок определения момента начала торможения, причем выход датчика скорости одновременно соединен со входами блоков вычисления рабочей скорости встречи и отрыва крючьев кантователя с раскатом, выход датчика тока соединен со входом блока контроля приложения и сброса нагрузки, выход датчика положеHJM соединен со входом блока определения момента начала торможения, выход блока контроля приложения и сброса нагрузки соединен одновременно со входами блока определения моментй рачала торможения и с блоком выработки и выдачи сигнала, ограничения, выходы блоков вычисления, рабочей скорости
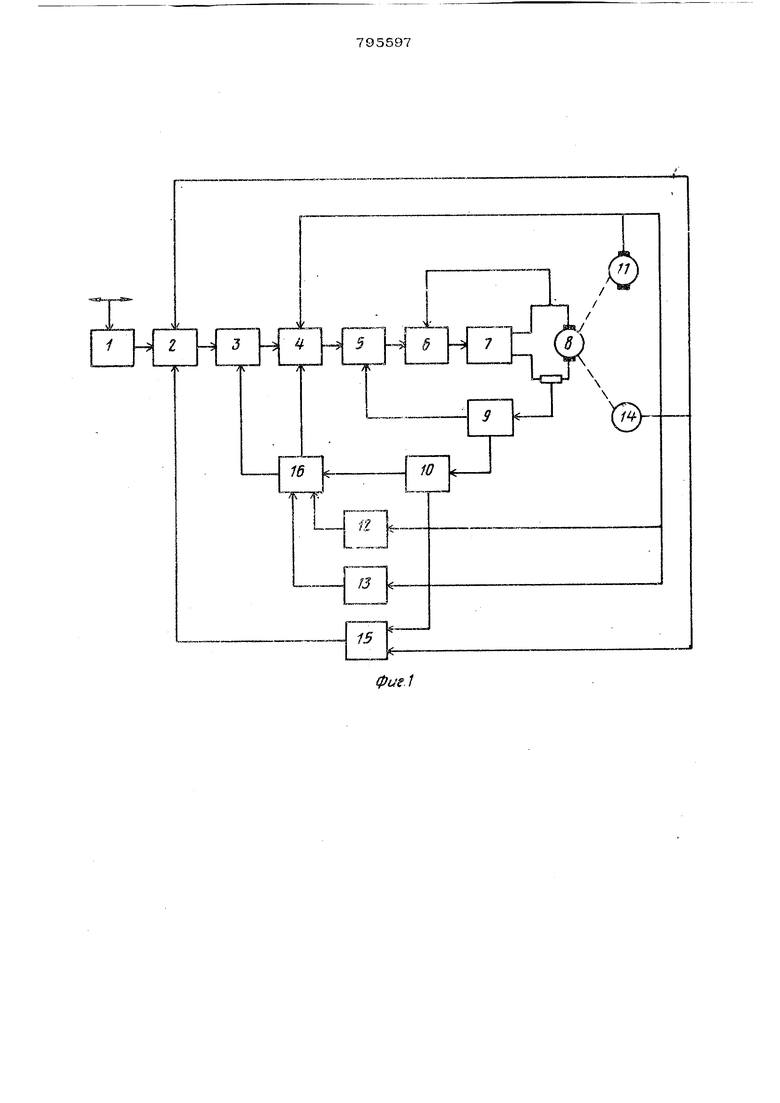
скорости изменением напряжения тиристорного преобразователя, на фиг. 2 - развернутая схема элементного исполнения блока вычисления рабочей скорости ветрека выработки и вьщачи сигнала ограничения, блока контроля приложения и сброса нагрузки, блока вычисления рабочей скорости отрыва крючьев кантователя от раската и блока определения момента начала торможения.
Устройство содержит последовательно присоединенные командоаппарат 1, регулятор 2. положения, задатчик 3 интенсивности, регуляторы 4, 5 и 6 соответственно скорости, -тока и напряжения, тиристорный преобразователь 7 напряжения. Для усиления сигнала, пропорционального току двигателя 8, применен датчик 9 тока. Выход датчика 9 тока соединен со входами регулятора 5 тока и блока 1О контроля приложения и сброса нагрузки. Выход датчика 11 скорости соединен со входами блока 12 вычисления рабочей скорости встречи крючьев кантователя с раскатом и блоком 13 вычисления рабочей скорости отрыва крючьев кантователя от раската. Выход датчика 14 положения соединен со входом блока 15 определения начала торможения. Ко входам блока 16 выработки и вьщачи сигнала ограничения с переключением сигнала ограничения присоединены выходы блоков 10, 12 и 13 контроля приложения и сброса нагрузки, вычисления рабочей скорости встречи и отрыва крючьев кантова1 еля с раскатом, а его выходы через переключающее устройство подключены ко входам задатчика 3 интенсивности и регулятора 4 скорости. Выход блока 15 определения начала торможения подсоединен со входом регулятора 2 положения.
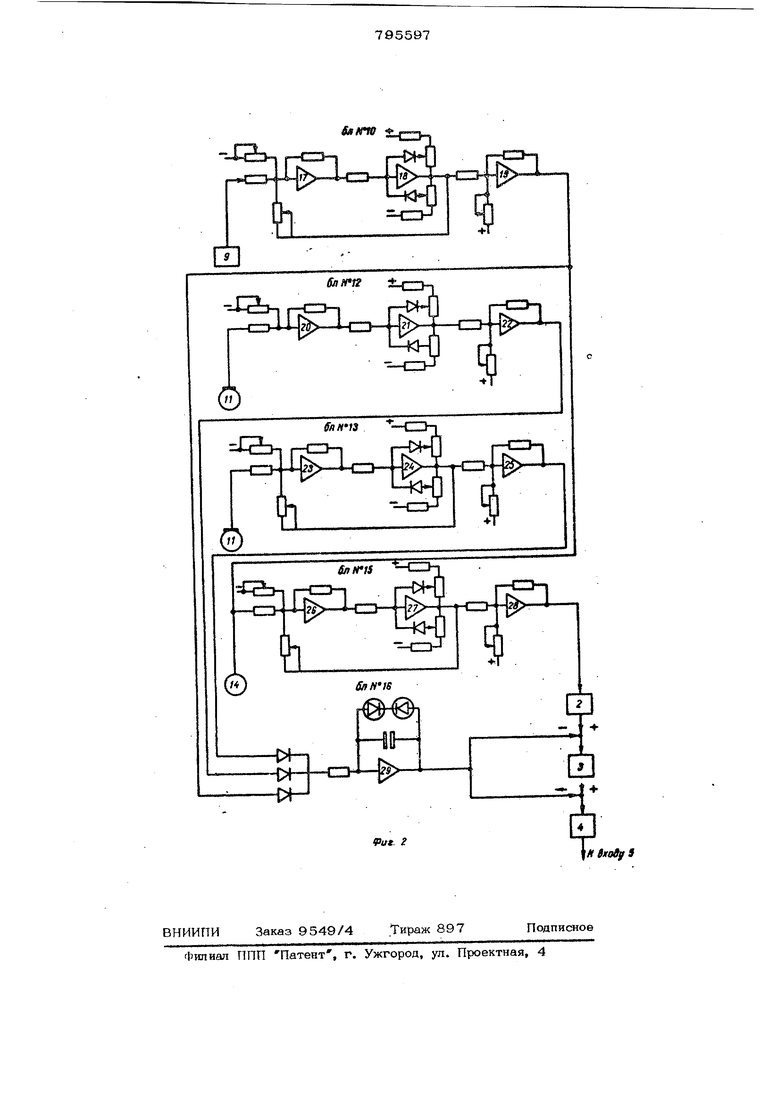
Блок 1О контроля приложения и сброса нагрузки состоит из последовательно 74 встречи и отрыаа крючьев кантователя с раскатом через блок выработки и выдачи сигнала ограничения соединены со входами задатчнка интенсивности и регулятора скорости, выход датчика -юложения соедииен со входом определения момента rfaчала торможения, выход блока определения момента, начала торможения, соединен со входом регулятора положения. На фиг. 1 представлена блок-схема предлагаемого устройства программного управления приводом кантователя обжимного реверсивного прокатного стана с безредукторным электроприводом кантователя по системе ТГ1-Д и регулированием крючьев кантователя с раскатом, блосоедииоиных сумк ирующего усилителя 17 усилителя 18 с ограничением по выходному напряжению и усилителя 19 с зоной нечувствительности по входному сигналу, причем выход усилителя 18 с ограничением по напряжению соединен со входом суммирующего усилителя 17. Блок 10 позволяет получить на выходе триггерную характеристику. На один из входов суммирующего усилителя 17 блока Ю поступает сигнал от датчика тока 9, на второй иа входов поступает сигнал от источника постоянного тока. Блок 12 вычисления рабочей скорости встречи крючьев кантователя с раскатом состоит из последовательно соединенных суммирующего усилителя 2О, усилителя 21 с ограничением по выходному напряжению и усилителя 22 с зоной нечувствительности по входному сигналу. Блок. 12 позволяет получить на выходе релейную характеристику. На один из входов суммирующего усилителя 2О блока 12 поступает сигнал от датчика скорости 11, на второй из входов поступает сигнал от источника постоянного тока. Блок 13 вычисления рабочей скорости отрыва крючьев кантгователя от раската состоит из последовательно соединенных суммирующего усилителя 23, усилителя 24 с ограничением по выходному напряжению и усилителя 25 с зоной нечувствительности по входному сигналу, причем выход усилителя 24 с ограничением по напряжению соединен со входом суммирующего усилителя 23. Блок 13 позволяет получить на выходе триггерную характеристику. На один из входов суммирующего усилителя 23 блока 13 поступает сигнал от датчика скорости 11, на второй из выходов поступает сигнал от источника постоянного тока. Блок 15 определения момента начала торможения состоит из последовательно соединенных суммирующего усилителя 26, усилителя 27 с ограничением по напряжению и усилителя 28 с зоной нечувствительности по входному сигналу,, причем выход усилителя 27 с ограничением по напряжению соединен со входом суммирующего усилителя 26. Блок 15 позволяет получить на выходе триггерную характеристику, Ча один из входов суммирующего усилителя 26 блока 15 поступают сигналы от . блока 1О контроля приложения и сброса нагрузки и датчика положения 14, на второ из входов поступает сигнал от источника 1ОСТОЯННОГО тока. Блок 16 сброса выработки и выдачи сигнала О1раничения
состоит из интегрирующего усилителя 29 с ограничением. На вход интегрального усилителя 29 поступают сигналы от блоков 10, 12 и 13 контроля приложения и сброса нагрузки, вычисления рабочей скорости-встречи и отрыва крючьев кантователя с раскатом.
Устройство работает следующим образом.
Величина скорости вращения двигателя и перемещения крючьев кантователя из одного крайнего положения в другое задается с помощью командоаппарата 1, выходной сигнал которого поступает на регулятор 2 положения. Выходной сигнал регулятора 2 положения подается на вход задатчика 3 интенсивности. Выходной сигнал задатчика 3 интенсивности, изменяющийся по заданному закону, подается на вход регулятора 4 скорости. На други входы регулятора 4 скорости поступают сигналы от датчика 11 скорости и блока 16 выработки и вьщачи огра1шчеиия с переключением сигнала ограничения. Выходной сигнал регулятора 4 скорости, являющийся результатом сравнения заданного и фактического значения скорости, поступает на вход регулятора 5 тока, задавая величину тока двигателя. Выходной сигнал регулятора 5 тока, как результат сравнения заданного и фактического значений тока, представляет собой задание величины напряжения тиристорного преобразователя 7 и поступает на вход регулятора 6 напряжения. На другой вход регулятора 6 напряжения поступает сигнал, пропорциональный текущему значению напряжений тиристорного преобразователя 7, Выходной сигнал регулятора 6 напряжения является управляющим сигналом тиристорного преобразователя 7.
Контроль требуемой рабочей скорости Vp(4 крючьев кантователя (контроль за выполнением условия i:)
Vp.c Vg 0,4-0,45 м/сек,
гдеУг,,/ - расчетная рабочая скорость
встречи крючьев кантователя с раскатом, условия 2: Vp..2-l.
где VQI/ - расчетная раоочая сп.орость отрыва крючьев кантователя от раската) в момент ударного прложения и сброса технологической нагрузки по характеру изменения тока и скор(.с двигателя блоками 1О, 12 и 13 проиаводится формированеинем диаграмм рабоч скорости двигат эля. В момент начала кг1нтоаки раската оператор дает команду на перемещение крючьев кантователя с крайнего нижнего паюжения, В процессе перемещения крючьев кантователя происходит сравнение их текущей рабочей скорости с расчетной в блоках 12, 13. Разгон до расчетной скорости встречи крючьев кантователя с рас катом осуществляется с заданным условием. Если текущая рабочая скорость больше или равна расчетной, то на выходах блоков 12, 16 появляется сигнал, который,, воздействуя на задатчик 3 интенсивности и .регулятор 4 скорости, обеспечивает равенство текущей рабочей скорости с расчетной. В момент соприкосновения крючьев кантователя с раскатом на входе и выходе блока 10 пропорционально статической составляющей тока двигателя от раската появляется сигнал, который снимает запрет на огра ничение текущей рабочей скорости, и а свою очередь, выдает запрет на начало торможения. После досткнсения крючьями кантователярасчетной рабочей скорости отрыва их от раската на выходах блоков 13, 16 появляется сигнал, который, воз действуя на задатчик 3 интенсивности и регулятор 4 скорости, обеспечивает рабочую скорость двигателя, равной расчетной рабочей скорости отрыва. В момент отрыв-а крючьев кантователя от раската исчезает статическая составляющая тока двигателя от раската, вследствие чего на входе и выходе блока 1О исчезает сигнал, который снимает запрет на Начало торможения, В зависимости от геометрических размеров блок 15 вы дает сигнал на начало торможения двига ля. Устройство работает аналогично для всех кантовок раската. Значения ускорен и скоростей привода, крутящих моментов усилий в элементах кантователя, необходимых для надежной работы механизма, зависят от веса и геометрических разме ров раската, параметров оборудования, времени кантовки раската и определяются статистически для каждого стала в о дельности. Tait. образом, устройство обеспечивает снижение динамических нагрузок в элементах кантователя, повьщ1ение надехоюсти кантовки раската без снижения темпа прокатки путем регулирования ускорения и скорости привода в зависиМОСТИ от скорости встречи крючьев с раскатом и минимального крутящего мо- мента при силовом взаимодействии крюка со слитком. Формула изобретения 1. Устройство программного управления приводом кантователя обжимного реверсивного прокатного стана, содержащее последовательно соединенные командоаппарат, задатчик интенсивности и систему подчиненного регулирования, включающую контур регулирования положения с датчиком и регулятором положения, контур регулирования скорости с датчиком и регулятором скорости, контуры регулирования тока и напряжения соответственно с датчиками и регуляторами тока и напряжения, отличающееся тем, что, с целью повыщения долговечности механического и электрического оборудования, сокращения времени текущих ремонтов, повыщения надежности кантовки без снижения производительности прокатного стана, оно дополнительно содержит блок вычисления рабочей скорости встречи крючьев кантователя с раскатом, блок выработки и вьодачи сигнала ограничения, блок контроля приложения и сброса нагрузки, блок вычисления рабочей скорости отрыва крючьев кантователя от раската, блок определения момента начала торможения, причем выход датчика скорости одновременно соединен со входами блоков вычисления рабочей скорости встречи и отрыва крючьев кантователя с раскатом, выход датчика тока соединен ср входом блока контроля приложения и сброса- нагрузки , вы-ч ход датчика положения соединен со в ходом блока определения момента начала торможения, выход блока контроля приложения и сброса нагрузки соединен одновременно со входами блока определения момента начала торможения и с блоком выработки и выдачи сигнала ограничения, выходы блоков вычисления рабочей скорости встречи и отрыва крючьев кантователя с раскатом через блок выработки и выдачи сигнала ограничения соединены со входами задатчика интенсивности и регулятора скорости, выход датчика положения соединен со входом блока определения момента начала торможения, выход блока определения момекгга начала торможения соединен со входом регулятора положения. . . 2. Устройство поп. 1, отлича ю щ е е с я тем, что блок контроля при ложения и сброса нагрузки состоит иэ последовательно соединенных суммирующего усилителя, усилителя с ограничением его выходного напряжения, усилителя с зоной нечувствительности по входному напряжению, причем выход уси лителя с ограничением по выходному на пряжению дополнительно соединен непосредственно со входом суммирующего усилителя, два других входа которого соединены соответственно с выходом да чика тока и источником постоянного ток 3.Устройство по п. 1, отличающееся тем, что блок вычисления рабочей скорости встречи крючьев кантователя с раск.атом состоит из последовательно соединенных сумкЛфующего усилителя, усилителя с ограничением ег выходного напряжения и усилителя с зоной нечувствительности по входному напряжению, причем выход усилителя с ограничением по выходному напряжению дополнительно соединен с одним из входов сумм1фующего усилителя, два други входа которого соединен соответственно с выходом датчика скорости и источником постоянного напряжения. 4.Устройство поп, 1, о т л и ч аю щ е е с я тем, что блок вычисления рабочей скорости отрыва крючьев кантователя от раската состоит из доследова тельно соединенных суммирующего усилителя, усилителя с ограничением его.в ходного напряжения и усилителя с зоно нечувствительности по входному напряжению, причем, выход усилителя с ограничением выходного напряжения дополнительно соединен с одним из ;входов суммирующего усилителя, два других входа которого соединены соответственно с выходом скорости и источника постоянного тока. 5.Устройство по п. 1, о т л и ч а ю щ е е с я тем, что блок определения момента начала торможения состоит из последовательно соединенных суммирующего усилителя, усилителя с о заничением выходного напряжения и усилителя с зоной нечувствительности по входному напряжению, причем выход усилителя с ограшпением по выходному напряжению дополнительно соединен с одним из входов суммирующего усилителя, другие входы которого соединены соответственно с выходом датчика положения, источНИКОМ постоянного тока и выходом уеилителя с зоной нечувствительности по входному напряжению в блоке контроля приложения и сброса нагрузки. 6. Устройство по п. 1, о т л и ч а ю щ е е с я тем, что блок выработки сигнала ограничения с переключением сигнала ограничения состоит из интегрирую- .; щего усилителя с огргничением выход ного напряжения, причем его первый вход соединен с выходом усилителя с зоной нечувствительности по входному напряжению в блоке контроля приложения и сброса нагрузки, второй вход - с выходом усилителя с зоной нечувствительности по входному напряжению в блоке вычислеН1Ш рабочей скорости встречи крючьев кантователя с раскатом, третий вход с выходом усилителя с зоной нечувствительности по входому напряжению в блоке вычисления рабочей скорости отрыва крючьев кантователя от раската, выход же интегрирующего усилителя соединен одновременно со входом и выходом задатчика интенсивности. 1-юточники информации, принятые во внимание при экспертизе 1. Главные приводы. А1еханизмы стана. Регулируемые приводы. Приншшиальные схемы. Технический проект ГПИ Тяжпромэлектропроект. Свердловское отделение, № С17 647-1, 1973.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство программного управления приводом кантователя | 1981 |
|
SU1031545A1 |
| Двухпозиционный электропривод кантователя блюминга | 1983 |
|
SU1088831A1 |
| Система программного управления механизмами установки валков обжимной клети винтовой прокатки | 1991 |
|
SU1794516A1 |
| Устройство для управления копающим механизмом экскаватора | 1976 |
|
SU730939A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| Система стабилизации натяжения подъемного каната экскаватора-драглайна | 1990 |
|
SU1768720A1 |
| Устройство управления приводом кантователя блюминга | 1978 |
|
SU772630A1 |
| Автоматическая система управления намоткой бумажного полотна | 1989 |
|
SU1657561A1 |
| Система программного управления механизмами установки валков обжимной клети винтовой прокатки | 1987 |
|
SU1537340A1 |
| Устройство для регулирования натяжения | 1984 |
|
SU1301756A1 |