1
Изобретение относится к машиностроению, а именно к узлам металлорежущих станков с программным управле нием.
Наиболее близким к изобретению по технической сущности и достигаемому результату является расточной плансуппорт с программнымуправлением, содержа1№«й корпус, в направляющих которого размещена с возможностью перемещения от автоматического привода каретка с механизмом зажима 1,
Недостатком известного устройства является то, что привод перемещения каретки вынесен за пределы плансуппорта. Остановка и инденксация шпинделя в определенном угловом положении с последующим подведением привода и присоединением его к ходовому винту, при необходимости радиальной подачи инструмента, снижают производительность. Кроме того, с помощью известнойголовки невозможны операции по расточке канавок, конусов и подрезке торцов.
Цель изобретения упрощение конструкции плансуппортной головки путем совмещения привода перемещения каретки с приводом шпинделя станка.
Указанная цель достигается тем, что головка, содержа1чая корпус, в
- . направляющих которого размещена с возможностью перемещения от автоматического привода каретка с механизмом зажима, снабжена дополнительным механизмом зажима, установленным на корпусе шпиндельной бабки и кинематически связанным с кареткой с .
10 возможностью из взаимодействия при радиальной подаче. Дополнительный механизм зажима может быть выполнен, например в виде электромагнитной муфты.
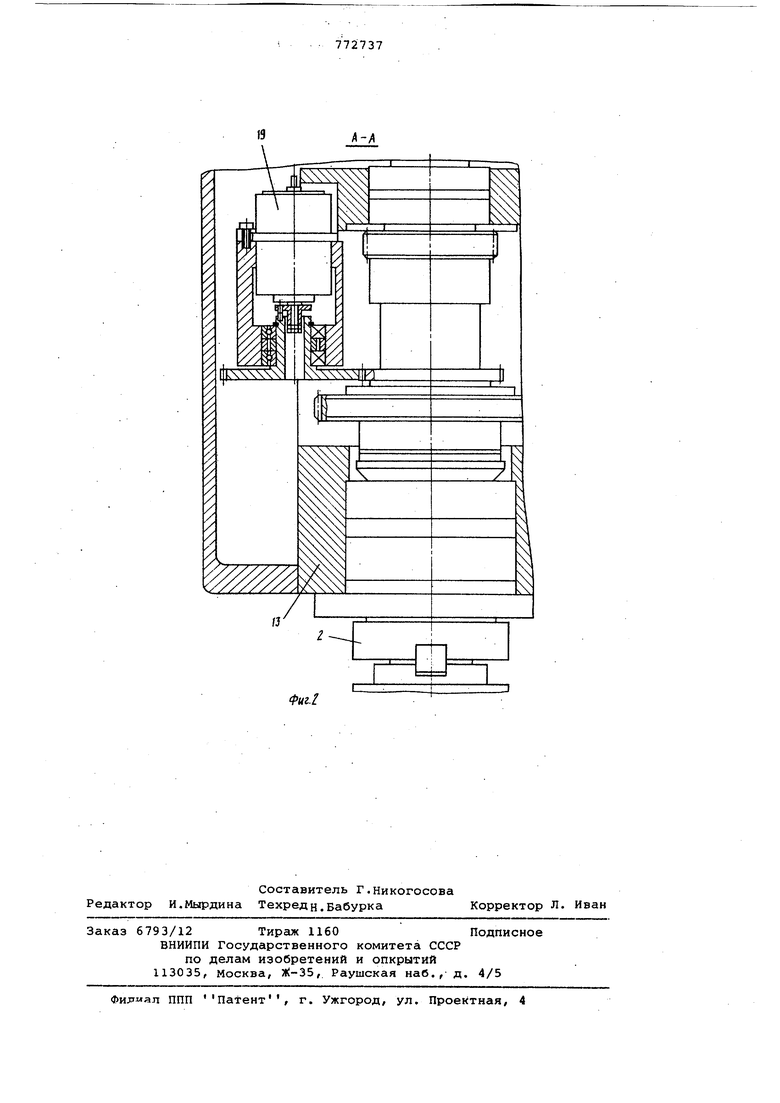
15 На фиг. 1 схематически изображено устройство, общий вид, разрез на фиг. 2 - разрез А-А на фиг. 1.
Плансуппортная головка содержит корпус 1, установленный в шпинделе
20 2 станка. В направляющих 3 корпуса 1 размещена каретка 4, несущая борштангу 5 с резцом 6. Механизм зажима каретки, выполненный в виде подпружиненного пружиной 7 кольца 8,
25 расположен на ходовом винте 9, соединенным с д ареткой 4 посредством
гайки.
Дополнительный механизм зажима, выполненный в виде электромагнитной муфты 10, содержит фрикционные
диски 11, взаимодействующие со шлицевой втулкой 12. Механизм зажима жестко установлен на корпусе 13 шпиндельной бабки и посредством шестерен 14,15 и 16, а также конических Ьестерен 17 и 18 связан с кареткой 4. Датчик 19 ориентации шпинделя 2 установлен на корпусе 13 шпиндельной бабки.
Устройство работает следующим образом.
При переводе каретки 4 в новое положение управляющая лента ЧПУ включает электромагнитную муфту 10 одновременно с включением вращения шпинделя 2. Якорь муфты 10 прижимает фрикционрые диски 11 к ее корпусу, при этом шлицевая втулка 12, шестерня 14 и блок шестерен 15 зажаты. Тормозной момент, созданный муфтой 10, больше тормозного , создаваемого механизмом зажима каретки 4. Поэтому вращающийся от своего привода (на чертеже не показан) шпиндель 2 вместе с корпусом 1 преодолевает тормозной момент механизма зажима каретки 4. Кольцо 8 механизма зажима каретки 4 отходит вправо, преодолевает усилие пружины 7 и освобождает ходовой винт 9. Wecтерня 16 обкатывается по внутреннему зубчатому венцу блока шестерен 15, а ходовой винт 9 получает вращение через конические шестерни 17 и 18. При этом осу1.(ествляется радиальная подача каретки 4. При отключении муфты 10 тормозной момент, создаваемый ею, уменьшается. Как только тормозной момент муфты 10 сганет меньше тормозного момента, создаваемого механизмом зажима кареки 4, последняя окажется зажатой.
Во время работы муфты 10 датчик 19 ориентации шпинделя 2 выполняет функцию датчикд положения .каретки 4, так как при работе муфты 10 угол поворота шпинделя 2 однозначно соответствует изменению координаты каретки 4. Изменение координаты каретки 4 датчик 19 передает в оперативную память устройства ЧПУ.
Такое исполнение плансуппортной
головки упрощает ее конструкцию путем совмещения привода радиашьного перемещения каретки с приводом шпинделя, а также производит операции по расточке канавок, конусов и подрезке торцов.
Формула изобретения
/Плансуппортная головка с программным управлением, содержащая корпус, в направляющих которого установлена с возможностью перемещения от автом тического привода каретка с механизмом зажима,о тличащаяся f тем, что, с целью упрощения конструкции , головка снабжена дополнительным механизмом зажима, кинематичес-. ки связанным с кареткой, с возможностью ихвзаимодействия при радиальной подаче, и установленным вне
коппуса головки.
2. Головка ПОП.1, отличающаяся тем, что дополнительный механизм зажима выполнен в виде электромагнитной муфты.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР г 414055, кл. В 23 В 29/034, 1972.
Фиг
| название | год | авторы | номер документа |
|---|---|---|---|
| Плансуппортная головка с программным управлением | 1980 |
|
SU931312A2 |
| Шпиндельное устройство | 1982 |
|
SU1084117A1 |
| Способ позиционирования плансуппорта расточной головки | 1981 |
|
SU1038089A1 |
| Устройство для радиального перемещения вращающегося инструмента | 1980 |
|
SU931313A1 |
| ПЛАНСУППОРТНАЯ ГОЛОВКА | 1991 |
|
RU2009777C1 |
| Станок для обработки графитированныхэлЕКТРОдОВ | 1979 |
|
SU841993A1 |
| Продольно-строгально-фрезерный станок | 1991 |
|
SU1797526A3 |
| Шпиндельная бабка | 1990 |
|
SU1780937A1 |
| Плансуппортная расточная головка | 1989 |
|
SU1748961A1 |
| ЗУБОШЕВИНГОВАЛЬНЫЙ СТАНОК | 1969 |
|
SU254314A1 |