(54) СИСТЕМА УПРАВЛЕНИЯ КОПИРОВАНИЕМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления асинхронным электродвигателем | 1989 |
|
SU1663734A1 |
| Копировальное следящее устройство для управления станком | 1982 |
|
SU1104470A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1758823A1 |
| Система автоматического управления скоростью вращения ротора турбины | 1980 |
|
SU866247A2 |
| Устройство для регулирования скорости электродвигателя | 1984 |
|
SU1267375A1 |
| Самонастраивающаяся система управления | 1987 |
|
SU1462242A1 |
| Цифровая система регулирования частоты вращения двигателя постоянного тока | 1986 |
|
SU1386959A1 |
| Многодвигательный электропривод | 1983 |
|
SU1280690A1 |
| Сигнализатор загрузки двигателя | 1990 |
|
SU1795316A1 |
| Устройство для управления подъемно-транспортной установкой | 1983 |
|
SU1159847A1 |
I
Изобретение отнссится к станкостроению и может найти применение в автоматическом управлении металпорежушими станками, например токарно-карусепьными, снабженными устройством дпя обработки фасонных поверхностей методом копирования.
Известны системы управления копированием с применением индуктивного копировального датчика и раздельного привода подач по двум координатам. Эти устройс-гва содержат блок копирования с индукти ным датчиком, фазовый дискриминатор, сервоусилитель и двигатель привода эадат чика управляющего сигнала привода по дач l.
Недостатком устройства является сложность конструкции.
Известны также системы управления копированием, в которых двигатели подач подключены к переменным резисторам, связанным между собой так, что увеличение сопротивления одного из них вызывает уменьшение сопротивления другого (2),
Недостатком этого устройства $тлнется низкая точность.
Цель изобретения - повышение точности и чистоты обработки за счет поддержания ступенчато-постоянной скорости подачи наряду с достаточно простой конструкцией, наладкой и управлением.
Поставленная иелъ достигается за счет -подключения эадатчика контурной скорооти к каждому пр1шоду подач через свой делитель управпяюшего сигнала, управляемый эпектроконтактным датчиком. Кроме того, делители управляющего сигнала подключены к усилителям привода подач через переменные резисторы, механически связанные между собой таким образом, что увеличение сопротивления одного из них вызывает уменьшение сопротивления другого.
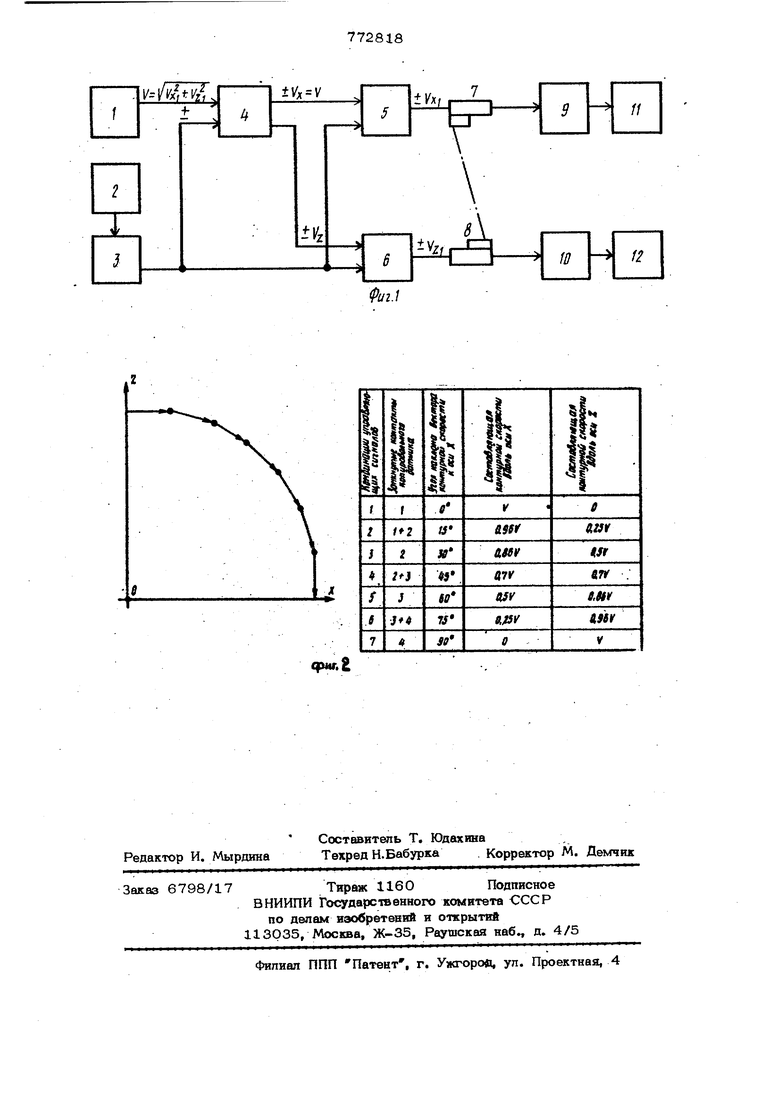
На фнг. 1 изображена схема системы управления копирсиаанием; на фиг. 2 - ди-, аграмма векторов контурной скорости для одного из копнрстания, с углом поворота вектора скорости 15 . 37 Устройство содержит задатчик 1 контурной скорости, эпектроконтактный дат чик 2, подключенный к схаме 3 выбора вида копирования. Система включает также формирователи 4 знаков управляющих сигналов, делители 5, 6 управляющего сигнала, переменные резисторы 7, 8, приводы подач 9, Юн исполнительные двигатели 11, 12, Параметры делителей 5, 6 выбраны таким образом, что сохраняется постоянной контурная скорость (V-). v V Vy - скорость вдоль оси X Y, скорость вдоль оси Z. Например, датчик 2 имеет четыре кон такта, позволяющие получить семь комби наций управляющих сигналов, благодаря которым вектор скорости (фиг. 2) поворач1гоается через 15 т. е. 30-45 -60-75®-90 : Переменные резисторы 7 и 8, включен ные между управляемыми делителями 5, 6 и приводами подач, позволяют вручную ос5тдествлять поворот вектора контурной скорости внутри угла, определяемого командами электроконтактного датчика 2. Возможен и другой выбор углов поворота вектора контурной подачи изменением параметров делитеггей управляющего сигнала 5, 6 в зависимости от конкре-гной обрабатываемой детали. Система управления копирование. работает следующим образом. Контурная скорость копирования задается задатчиком 1. Электроконтактный датчик 2 через скему выбора вида копирования 3, воздействуя на формирователь знаков 4, формирует управляющие сигналы с учетом направления песемещения по каждой оси i V У И V М , по своему модулю равные заданной контурной скорости, пост5пающие в делители 5, 6. При отсутсовии рабочего нажатия пальца электроконтактного, датчика 2 управляющий сигнал навыходе одного из делителей 5, 6 (в зависимости от выбра ного вида копирования) равен заданной скорости с соответствующим знаком, а на выходе другого равен нулю. По мере ЭОаелйчения давления на палец датчика 2 8 выходной сигнал одного из делителей 5, 6 по модулю уменьшается в соответствии с состоянием датчика 2, а на выходе другого делителя Соответственно увеличивается. Это изменение выходных сигнале подчиняется уравнению и J., 1 2 1 1 таким образом, что при каждсм состоянии контактов датчика 2 контурная скорость остается постоянной, причем вектор ее за счет изменения соотношений. V, 2 поворачивается в направлении копирования. Упомянутые сигналы с выходов делителей 5, 6 поступают на переменные резисторы 7,8, изменение которых приводит к повороту вектора контурной скорости вниз или в иную сторону (фиг. 2), в зависимости от направления изменения резисторов 7, 8, сигналы которых поступаютв приводы подач 9, 10, управляющие ис полнительными двигателями 11, 12.о Формула изобретения 1.Система управления копированием, содержащая электроконтактный датчик, задатчик контурной скорости, формирователь знаков управляющих сигнале, схему выбора вида копирования, усилители приводов подач и исполнительные двигатели, отличаюшаяся тем, что, с целью повышения точности и чистоты обработки, система снабжена двумя делителями управляющего сигнала, причем задатчик контурной скорости подключен к каждому приводу подач через делитель управляющего сигнала, который связан с электроконтактным датчиком. 2,Система по п. 1, о т л и ч а а я с я тем, что делители управляюш&го сигнала подключены к делителям приводов подач через переменные резисторы, механически связанные между собой так, что увеличение сопротивления одного вызывает уменьшение сопротивления друго го. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 285456, кл. Q 05 В 5/О5, 1969. 2.Авторское свидетельство СССР № 252И8, кп. В 23 а 5/10, 1969.
-ц
лт
fljffi
а
fsr
uter
«
лп
utv
tn
W
e,9tif
H5V
W
U96lf
J
