Изобретение относится к захватным устройствам, используемым преимущественно в манипуляторах для погрузочпо-разгрузочных и подъемно-транспортных операций.
Известен захват по основному авт. св. № 440249, содержащий корпус с призматической опорой и зажимные губки, соединенные с .корпусом посредством шарнирных многозвенников, в частности четырехзвенников.
Недостатками известного захвата являются возможность заклинивания захватываемого предмета между губкой и ведомым звеном, что приводит к деформациям ведомого и промежуточного звеньев и к снижению надежности захвата, а также консольная установка губок на концах промежуточных звеньев, приводящая к увеличению габаритов захвата.
С целью повышения надежности и срока службы захвата, а также уменьщения его габаритов ведомое звено каждого шарнирного четырехзвенника выполнено в виде зажимной губки, имеющей на конце сквозные продольные пазы, образующие сопрягаемые пальцы.
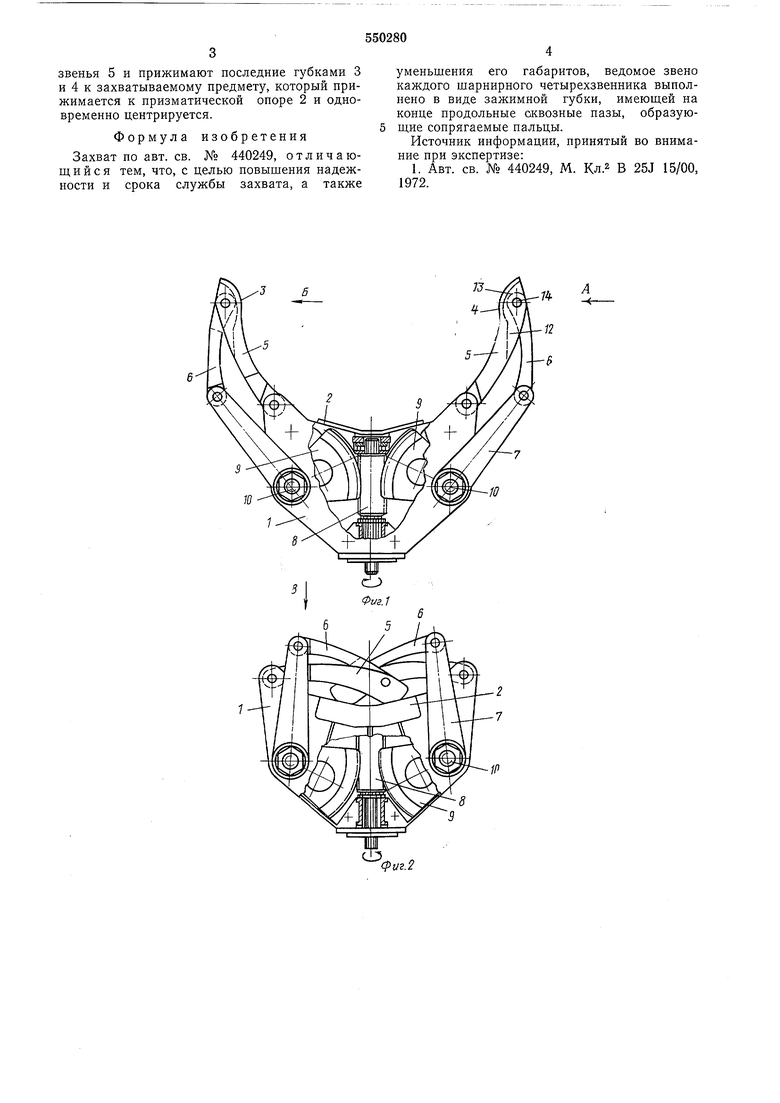
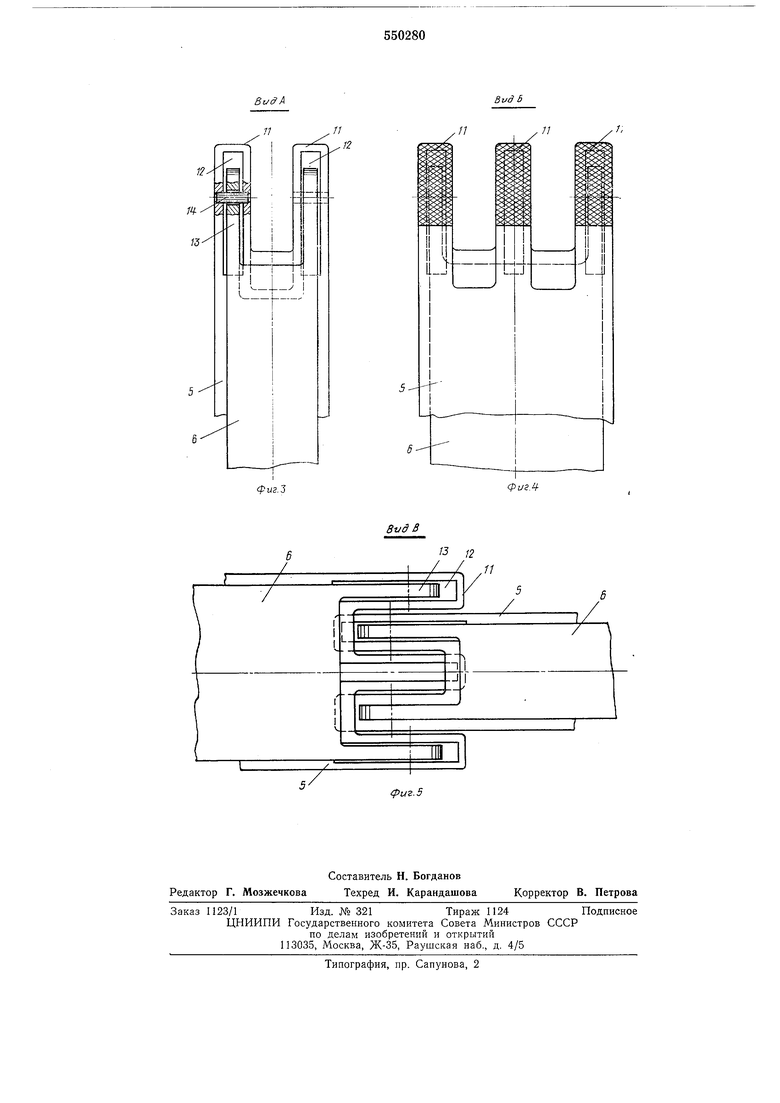
На фиг. 1 показан предлагаемый захват в раскрытом состоянии, общий вид; на фиг. 2- то же при сомкнутом положении губок; на фиг. 3 - вид по стрелке А на фиг. 1; на фиг.
4 - вид по стрелке Б на фиг. 1; на фиг. 5 - вид по стрелке В на фиг. 2.
Захват содержит корпус 1 с призматической опорой 2, расположенной симметрично
продольной оси корпуса, зажимные губки 3 и 4, выполненные на концах ведомых звеньев 5, промежуточные звенья 6 и ведущие звенья 7 шарнирных четырехзвенников и привод четырехзвенников. Привод четырехзвенников содержит червяк 8, установленный внутри корпуса 1, и червячные секторы 9, установленные на оси шарниров 10 четырехзвенника, связанные с ведущими звеньями 7 и взаимодействующие с червяком 8. На конце ведомых звеньей 5 выполнены продольные сквозные пазы, образующие сопрягаемые пальцы 11 зажимных губок 3 и 4. Шарнирное сопряжение между ведомым звеном 5 и промежуточным звеном 6 выполнено, например, в виде гнезд
12 в пальцах 11 и ответных выступов 13 на конце промежуточного звена 6, соединенных с помощью осей 14.
Захват работает следующим образом. В исходном положении звенья 5 с губками
3 и 4 отведены в крайнее положение. Для захватывания предмета приводят во вращение червяк 8, который поворачивает червячные секторы 9 и связанные с ними ведущие звенья 7. Ведущие звенья 7 воздействуют через промежуточные звенья 6 на ведомые
звенья 5 и прижимают последние губками 3 и 4 к захватываемому предмету, который прижимается к призматической опоре 2 и одновременно центрируется.
Формула изобретения
Захват по авт. св. № 440249, отличающийся тем, что, с целью повышения надежности и срока службы захвата, а также
уменьшения его габаритов, ведомое звено каждого шарнирного четырехзвенника выполнено в виде зажимной губки, имеющей на конце продольные сквозные пазы, образующие сопрягаемые пальцы.
Источник информации, принятый во внимание при экспертизе:
1. Авт. св. № 440249, М. Кл. В 25J 15/00, 1972.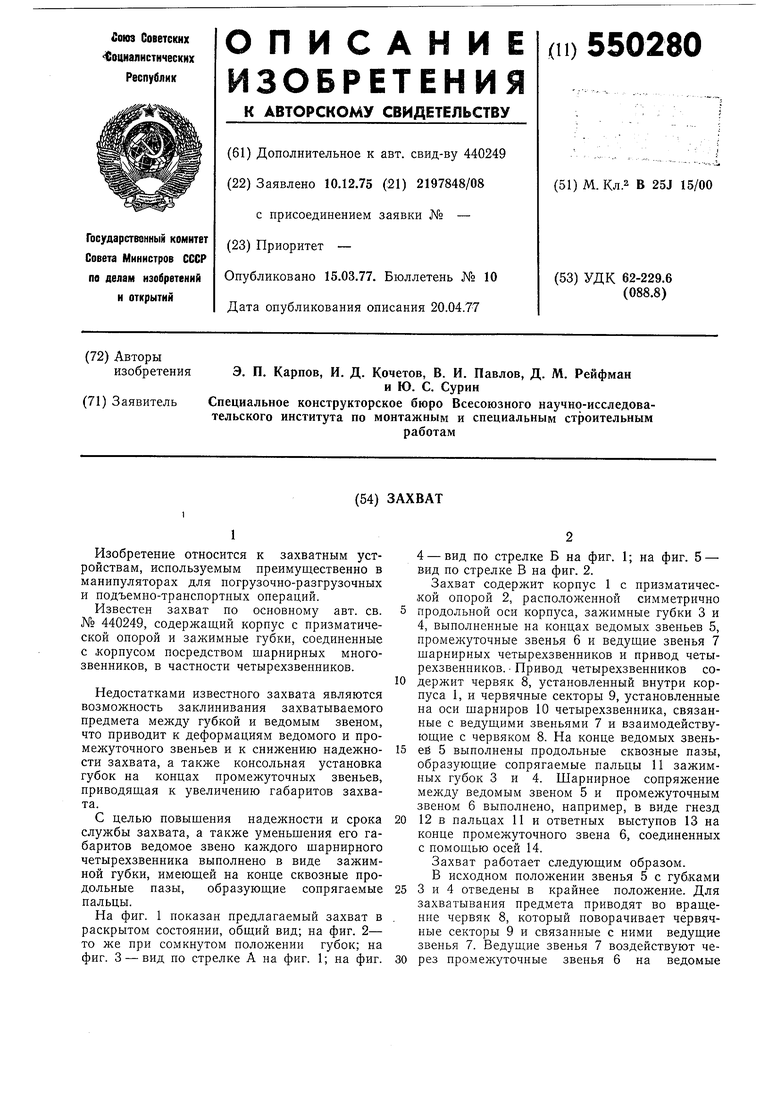
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват | 1980 |
|
SU965764A2 |
| Захват | 1972 |
|
SU440249A1 |
| Захват | 1976 |
|
SU558789A1 |
| Захват манипулятора | 1978 |
|
SU810476A1 |
| Захватное устройство | 1989 |
|
SU1785892A1 |
| Захват промышленного робота | 1980 |
|
SU891435A1 |
| Клещевая подача к горячештамповочному прессу | 1989 |
|
SU1690920A1 |
| Захват | 1975 |
|
SU662345A1 |
| Кисть механической руки промышленногоРОбОТА | 1979 |
|
SU841961A1 |
| Двухместное захватное устройство | 1988 |
|
SU1516346A2 |
Л
tP
ф11г.2
12
