1
Изобретение относится к машиностроению и м;ожет применяться при автоматизации погрузочно-разгрузочных и подъемно-транспортных работ, выпояняемых манипуляторами.
Известны захваты для ма)шпулятора, содержащие корпус и зажимные губки, соедяненные с корпусом шарнирныкш многозвен- никами, связанными с общим приводом Ij. ,- - Однако в этих захватах при увеличении крутящего момента на червяке .привода (что требуется при повышении грузоподъемности) увеличивается радиальная составляющая усилия, а это ведет к увеличению габаритов передачи и корпусных деталей самого захвата; увеличение габаритов передачи в свою очередь, увеличивает осевую составляющую и усложняет опорные узлы.
Цель изобретения - уменьшение габаритов и упрощение конструкции без изменения грузоподъемности захвата.
Для этого в предлагаемом захвате привод вьтолнен в виде силового цил1шдра, корпус которого установлен с возможностью осевого перемещения и связан с ведущими
звеньями многозвенников через симметричные кулисные механизмы, кривошипы которых объединены с корпусом, дсулисы закреплены на ведущих звеньях многозвеиников, а ползунами являются оси шарниров кривошипов.
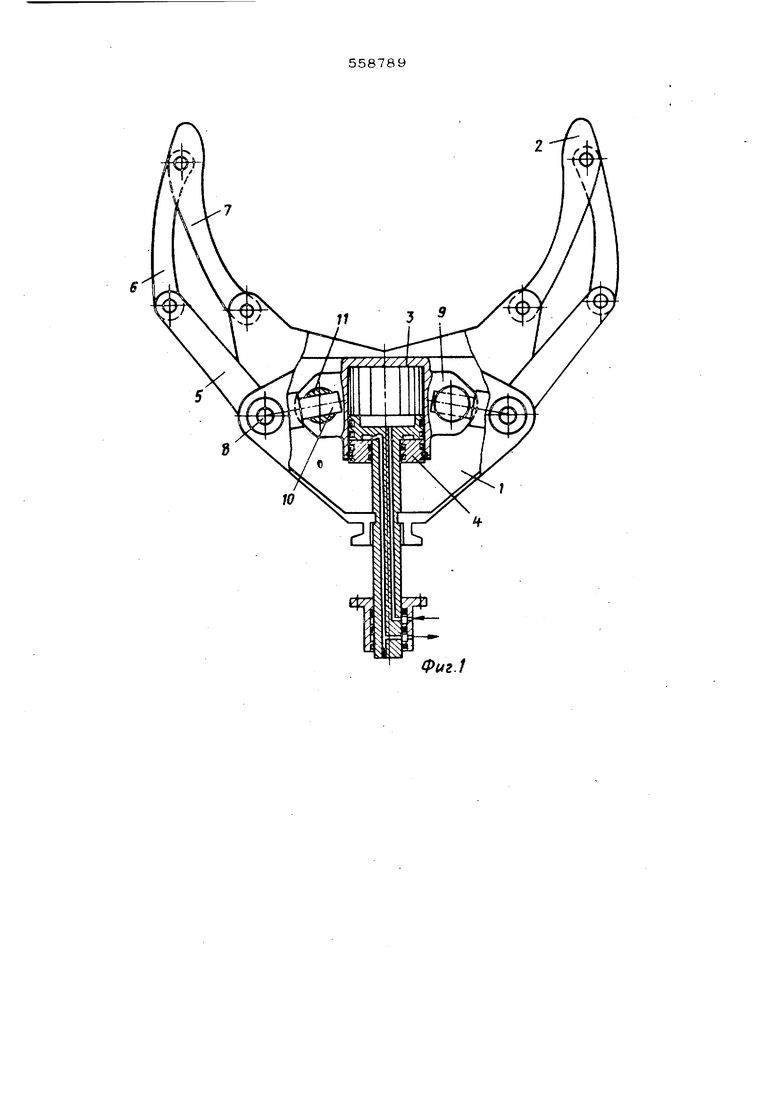
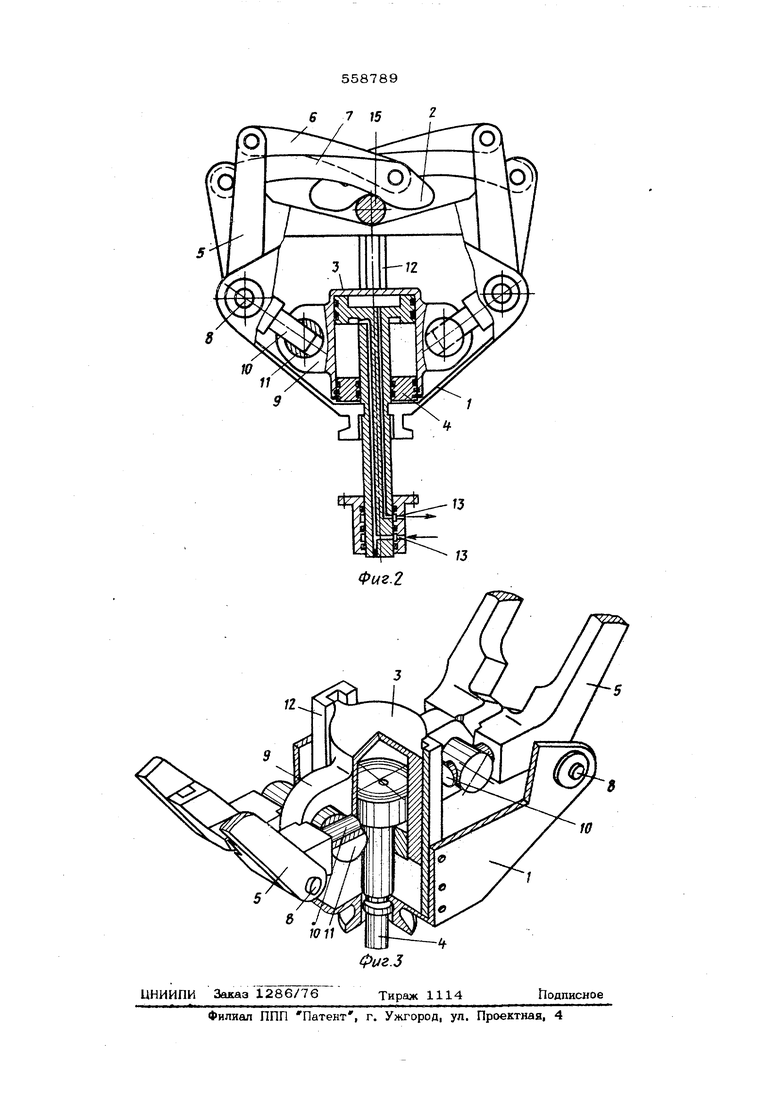
На фиг. 1 изображен описываемый захва обший вид; на фиг. 2 то же в сомкнутом положении губок; на фиг, 3 - привод захвата, обший вид.
Предлагаемый сшхват содержит корпус 1 зажикшые губки 2, соединеюгыо через шарнирные к.шо;озванники и симметричные кулисньге механизмы с приводом, который выполнен в виде подвижного в осевом направлении корпуса 3 силового цилиндра 4,
Каждый шарнирный многозвешшк, в част ности состоящий из четырех звеньев, содо жнт ведущее 5, промежуточное 6 и ведомое 7 звенья. Ведущие звенья 5 смонтированы на корпусе 1 захвата с помощью luapниров 8.
Каждый кулис)1ый механизм состоит из кривошипа 9, объеди} енного с корпусом 3 силового цилиндра 4, кулисы 1О, iWKpnn- ленной на ведущем звене 5, и ползуна 11, являющегося одновременно осью кривошипа 9. Корпус 3 силового цилиндра 4, например гвдроюшиндра, установлен в направляющи; 12. Шток гидроцилиндра 4 установлен без воамох ноств : осевого перемещения относиктельно корпуса 1 захвата. Зажимные гу KB 2 смыкаются и раскрываются перемещением корпуса 3 гидрощшиндра 4 в направ ляюших 12. Рабочая жидкость подается в по лость гидроцилиндра 4 через отверстия 13 в штокеи поворотную муфту 14, что позволяет осуществлять ротацию (вращение) захвата на базовом звене (на чертеже не показано), т.к. корпус 1 захвата жестко прикреплен к корпусу запястья, имеющего возможность вращения относительно предплечья. Захват работает следующим образом. В исходном положении губки 2 размещв ны относительно корпуса 1 произвольно, ги роцшшндр 4 в направляющих 12 относитель но, на1фимер, шарниров S размещен соотвео ственно положению губок 2 Для захвате объекта 15 «аннпулирования
орнектируют положение губок 2 перемеще кием гидроцилиндра 4 в соответствующую сторону путем подачи рабочей жидкости| черва муфту 14 иотверстия 13 в лтоке гидроцнлиндра в одну из полостей, Нбшри мер в штоковую (фиг. 1). Поскольку шток зафиксирован на корпусе 1 в осевом направлении, корпус 3 цилиндра начинает перемещаться вниз. Одновременно с корпусом 3 переместятся вниз кривощипы 9 вместе с ползунами 11. Перемещение вниз ползу нов 11, в свою очередь, вызовет давление на кулисы 1О, которые будут перемещать ся поступательно относительно ползунов 11 и одновременно поворачиваться относитель но шарниров 8. Одновременно будут поворачиваться ведущие звенья S, так как они жестко соединены с кулисами 10, и через
ненные через щарнирные многозвенники с приводом, отличающийся тем, что, с целью уменьшения габаритов и упрощения конструкции без изменения грузеподъемности, привод выполнен в виде силового цилиндра, корпус которого установлен с возможностью осевого перемещения и связан с ведущими звеньями многозвенников через симметричные кулисные механизмы, кривошик пы которых объединены с корпусом, кулисы закреплены на ведущих звеньях многозвенников, а ползунами являются оси ша широв кривощипов.
Источники информации, принятые во внимание при экспертизе;
1« Авторское свидетельство bfe 440249, МЖл.В 25 D 15/ОО, 1972. промежуточные звенья 6 передадут движение ведомым звеньям 5, на которых раомещены зажимные губки 2„ Движение корпуса 3, прекращается после выб ора зазора илюфтов,затем происходят силовое нагружение привода путем дойед&ния величины давлений в гидросистеме до требуемого усилия схвата. При несимметричном нагружении зажимных губок 2 вследст вие несимметричной формы объекта 15 манипулирования корпус 3 гидроцялиндра 4 стремится развернуться, однако, этот воэможный разворот предотвращается направляющими 12, жестко закрепленными на корпусе 1 захвата. Для освобождения объекта манипулирования от зажимных губок 2 необходимо подать рабочую жидкость в прогивопслоак- ную порщиевую полость гидроцшшндра. Формула изобретения Захват, например, для манипулятора, содержащий корпус и зажимные губки, соедиФ14г.1
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват робота | 1980 |
|
SU889422A1 |
| Захват промышленного робота | 1979 |
|
SU841962A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2010 |
|
RU2438858C2 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2303520C1 |
| Захват | 1972 |
|
SU440249A1 |
| Автоматизированный пресс для объемной горячей штамповки заготовок | 1989 |
|
SU1804943A1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2191108C1 |
| Клещевая подача к горячештамповочному прессу | 1989 |
|
SU1690920A1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2266192C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2274544C1 |