(54) ЗАХВАТ РОБОТА
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват промышленного робота | 1985 |
|
SU1315300A1 |
| Захват | 1976 |
|
SU558789A1 |
| Захват промышленного робота | 1983 |
|
SU1114550A2 |
| Захват промышленного робота | 1981 |
|
SU963852A1 |
| Захват промышленного робота | 1979 |
|
SU841962A1 |
| Автоматизированный пресс для объемной горячей штамповки заготовок | 1989 |
|
SU1804943A1 |
| Автоматическая линия штамповки поворотных кулаков | 1987 |
|
SU1466868A1 |
| Схват робота | 1983 |
|
SU1117205A1 |
| Захватное устройство | 1987 |
|
SU1495122A1 |
| Схват очувствленного робота | 1984 |
|
SU1227464A1 |
1
Изобретение относится к машиностроению, 8 частности к захватным устройствам манипуляторов, и может найти применение в автоматизированных линиях штамповки поковок сложной формы.
Известен захват робота, содержащий корпус, привод, например, силовой цилиндр с шарнирными многозвенниками, и зажимные губки f1
Недостатком известного устройства является ненадежность удерх ания деталей.
Цель изобретения - повышение надежности удержания деталей сложной формы.
Цель достигается тем, что захват робота снабжен дополнительными сило выми цилиндрами, о каждый силовой цилиндр связан с зажимной губкой noctредством дополнительно введенной опорной плиты с ложементом, повторяющим форму захватываемой детали в продольном сечении.
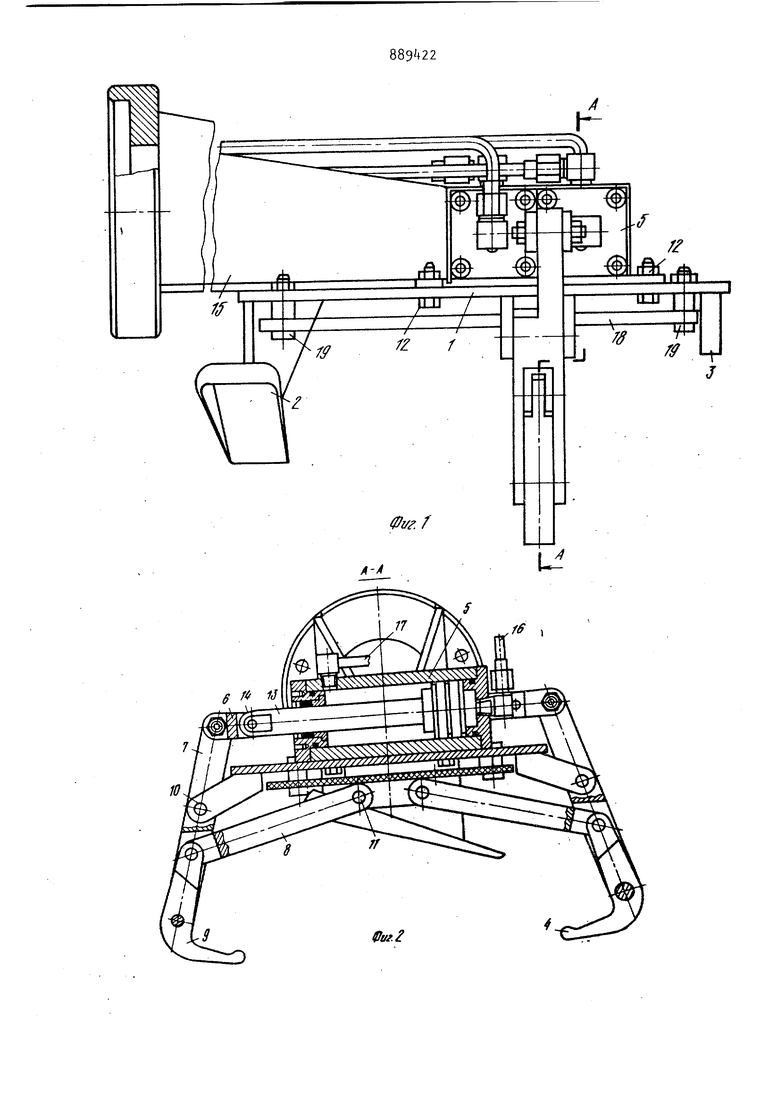
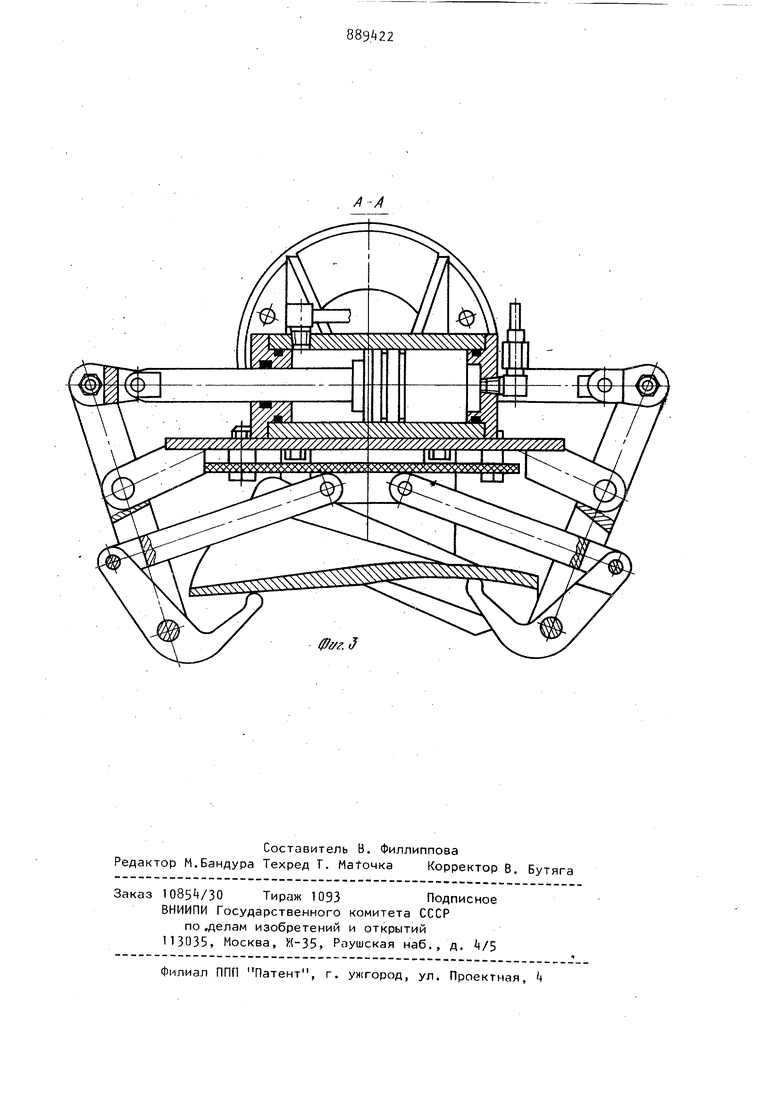
На фиг. 1 изображен захват, общий вид; на фиг. 2 - сечение А-А Hi. фиг. 1, в разомкнутом положении; на фиг. 3 - то же, в замкнутом положении.
Захват содержит опорную плиту 1 с размещенными на ней ложементами 2 и 3, двух зажимных губок Ц, соединенных через шарнирные многозвенники с механизмом привода, который выполнен в виде блока 5 силовых цилиндров. Каж1 дый шарнирный многозвенник содерх ит ведущее 6, проежуточные 7 и 8 и ведомое 9 звенья. Промежуточные звенья 7 и 8 смонтированы на опорной плите 1 захвата с помощью шарниров 1C) и 11. Опорная плита 1 укреплена на блоке 5 силовых цилиндров болтами 12. Штоки 13 гидроцилиндров блока 5 соединены с ведущими звеньями 6 шарнирами 1. Блок 5 силовых цилиндров через кронштейн 15 жестко укреплен к корпусе запястья манипулятора. Рабочая жидкость подается в полости гидроцилиндблока 5 через трубопроводы 1б и Радиационный экран 18 укреплен на опорной плите 1 болтами 19.
Устройство работает следующим образом.
В исходном положении рабочая жидкость подается через трубопроводы 17 в штоковые полости блока силовых цилиндров, при этом зажимные губки k раскрыты. Манипулятор подводит захват к объекту так, чтобы поверхность ложементов 2 и 3 соприкоснулась с соответствующей поверхностью захватываемой детали. Подавая рабочую жидкость через трубопроводы 16 в поршневые полости блока 5 цилиндров штоки 13, начинают перемещаться, одновременно со штоками 13 перемещаются ведущие звенья 6 многозвенников, что в свою очередь приводит к повороту промежуточных звеньев 7 относительно ша4зниров 10. Одновременно поворачиваются промежуточные звенья 8 относительно шарниров 11, которые передают движение ведомым звеньям 9- Движение прекращается после выбора зазора и люфтов, затем происходит силовое нагружение привода путем доведения величины давления в гидросистеме до требуемого усилия схвата.
Для освобождения объекта манипулирования необходимо подать рабочую жидкость в противоположные штоковые полости блока гидроцилиндров.
За счет применения ложемента, установленного на опорной плите, обеспечивается базирование захватываемой детали в захвате. Переход на схват
другой детали осуществляется сменой ложемента. Независимый привод зажимныЯ губок позволяет использовать их для разных деталей. Вынесенный привод зажимных губок и радиационная защита позволяет использовать захват для схвата горячих поковок, что расширяет область его использования. Экономическая эффективность данного схва, та определяется его техническим преимуществом.
Формула изобретения Захват робота, содержащий корпус, привод, например силовой цилиндр с шарнирными многозвенниками, и зажимные губки, отличающийся тем, что, с целью повышения надежности удержания деталей сложной фор-мы, он снабжен дополнительными силовыми цилиндрами, а каждый силовой
цилиндр связан с зажимной губкой посредством дополнительно введенной опорной плиты с ложементом, повторяющим форму захватываемой детали в продольном сечении.
Источники информации, принятые во внимание при экспертизе
