1
Изобретение относится к захватным устройствам, применяемым преимущественно для погрузо-разгрузочных, подъемно-транспортных и других технологических операций, выполняемых манипуляторамиИзвестны захваты, содержащие корпус, зажимные губки, соединенные с корпусом при помощи щарнирных четырехзвенников, сочлененных между собой приводным механизмом, и призматическую опору, расположенную симметрично продольной оси устройства. Однако такими захватами невозможно осуществлять захват предметов различной формы в больщом диапазоне размеров в связи с тем, что применяемые в известных конструкциях захватных устройств щарпирные четырехзвенпики в виде параллелограммов, с которыми связаны зажимные губки, обеспечивают только плоско-параллельное взаимное перемещение зажимных губок. Кроме того, требуется значительное пространство для размещения зажимных губок на удлиненных звеньях четырехзвенников, исполнения механизма привода в виде реечной передачи, размещения подвижной призмы и др. Это приводит к увеличению габаритов и веса зажимного устройства, усложняет компоновку привода и призматической опоры, ухудшает обзор предмета при его захвате.
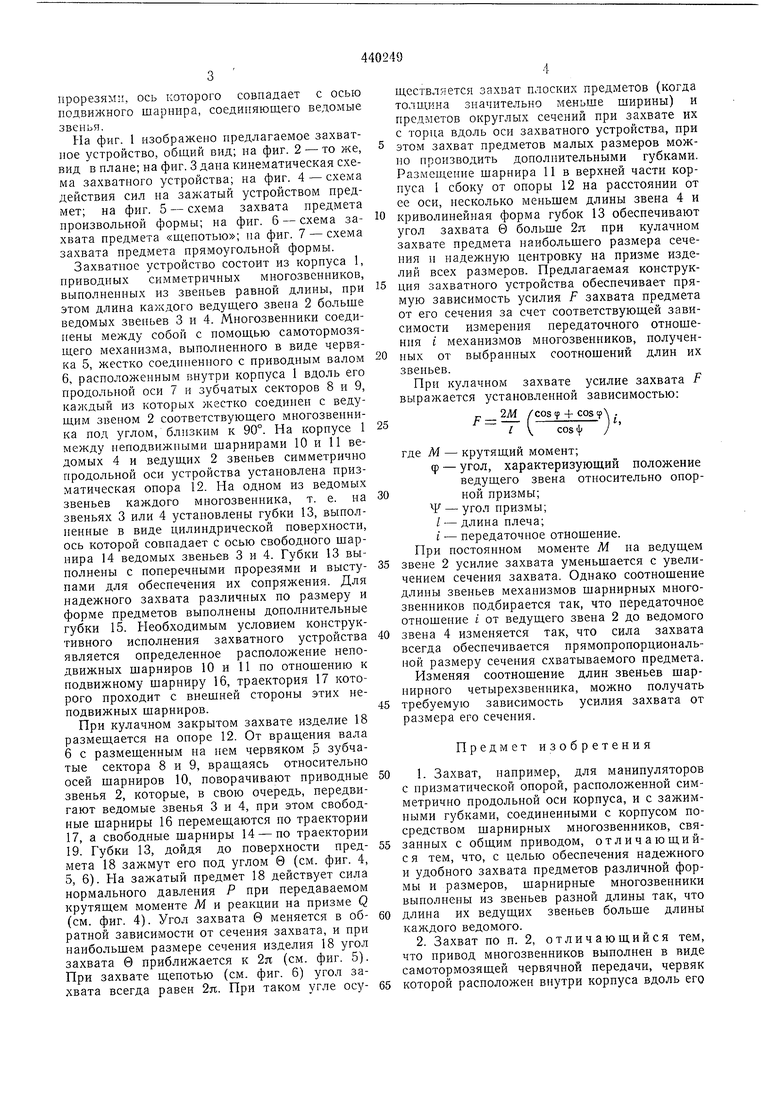
Для известпых захватов характерна большая потребляемая мощность приводного механизма, связанная с тем, что известные конструкции обеспечивают наибольшее усилие, действующее на зажимаемый предмет, при наименьшем размере его сечения, т. е. обеспечивают обратную зависимость усилия захвата предмета от размера его сечения, поэтому мощность привода выбирается из условия надежного крепления наибольших сечений предметов, при это.м наименьшие сечения захватываемых предметов нагружаются усилием, большим по величине, чем это требуется для их надежного захвата. Для обеспечения надежного захвата предметов различной формы и размеров как сбоку, так и с торца, сокращения габаритов и веса устройства, а также уменьшения потребляемой мощности шарнирные многозвенники сочленены между собой при помощи приводного самотормозящего механизма и выполнены из звеньев разной длины, при этом длина ведущего звена больще ведомых для обеспечения сходимости губок в вершине призматической опоры, стационарно установленной на корпусе между неподвижными шарнирами многозвенника. Привод многозвенников выполнен в виде самотормозящей червячной передачи, червяк которой расположен внутри корпуса вдоль его продольной оси, а каждый червячный сектор жестко соединен с ведущим звеном соответствующего многозвенника. Губки выполнены сопрягаемыми, каждая в виде цилиндра с прорезями, ось которого совпадает с осью подвижного шарнира, соединяющего ведомые звенья, На фиг. 1 изображено предлагаемое захватное устройство, общий вид; на фиг. 2 - то же, вид в плане; на фиг. 3 дана кинематическая схема захватного устройства; на фиг. 4-схема действия сил на зажатый устройством предмет; на фиг. 5 - схема захвата предмета произвольной формы; на фиг. 6 - схема захвата предмета «щепотью ; на фиг. 7 - схема захвата предмета прямоугольной формы. Захватное устройство состоит из корпуса 1, нриводных симметричных миогозвенников, выполненных из звеньев равной длины, при этом длина каждого ведущего звена 2 больще ведомых звеньев 3 и 4. Многозвенники соединены между собой с помощью самотормозящего механизма, выполненного в виде червяка 5, жестко соединенного с приводным валом 6, расположенным внутри корпуса I вдоль его продольной оси 7 и зубчатых секторов 8 и 9, каждый из которых жестко соединен с ведущим звеном 2 соответствующего многозвепника под углом, близким к 90°. На корпусе 1 между неподвижными щарнирами 10 и 11 ведомых 4 и ведущих 2 звеиьев симметрично продольной оси устройства установлена призматическая опора 12. На одном из ведомых звеньев каждого многозвепника, т. е. па звеньях 3 или 4 установлены губки 13, выполпенные в виде цилиндрической поверхности, ось которой совпадает с осью свободного щарнира 14 ведомых звеньев 3 и 4. Губки 13 выполнены с поперечными прорезями и выступами для обеспечения их сопряжения. Для надежного захвата различных по размеру и форме предметов выполнены дополнительные губки 15. Необходимым условием конструктивного исполнения захватпого устройства является определенное расположение неподвижных шарниров 10 и 11 по отношению к подвижному шарниру 16, траектория 17 которого проходит с внешней стороны этих неподвижных шарниров. При кулачном закрытом захвате изделие 18 размещается на опоре 12. От вращения вала 6 с размещенным на нем червяком .5 зубчатые сектора 8 и 9, вращаясь относительно осей шарниров 10, поворачивают приводные звенья 2, которые, в свою очередь, передвигают ведомые звенья 3 и 4, при этом свободные шарниры 16 перемещаются по траектории 17, а свободные шарниры 14 - по траектории 19. Губки 13, дойдя до поверхности предмета 18 зажмут его под углом 8 (см. фиг. 4, 5, 6). На зажатый предмет 18 действует сила нормального давления Р при передаваемом крутящем моменте М и реакции на призме Q (см. фиг. 4). Угол захвата в меняется в обратной зависимости от сечения захвата, и при наибольшем размере сечения изделия 18 угол захвата в приближается к 2л (см. фиг. 5). При захвате щепотью (см. фиг. 6) угол захвата всегда равен 2я. При таком угле осуществляется захват плоских предметов (когда толщина значительно меньше ширины) и предметов округлых сечений при захвате их с торца вдоль оси захватного устройства, при этом захват предметов малых размеров можно производить дополнительными губками. Размещение щарнира 11 в верхней части корпуса 1 сбоку от опоры 12 на расстоянии от ее оси, несколько меньшем длины звена 4 и криволинейная форма губок 13 обеспечивают угол захвата 9 больше 2n при кулачном захвате предмета наибольшего размера сечения и надежную центровку на призме изделий всех размеров. Предлагаемая конструкция захватного устройства обеспечивает прямую зависимость усилия F захвата предмета от его сечения за счет соответствующей зависимости измерения передаточного отношения i механизмов мпогозвепников, полученных от выбранных соотношений длин их звеньев. При кулачном захвате усилие захвата F выражается установленной зависимостью: р.2М /costp 4- cosyX . г V созф ) где М - крутящий момент; Ф - угол, характеризующий положение ведущего звена относительно опорной призмы; F - угол призмы; / - длина плеча; i - передаточное отношение. При постоянном моменте М па ведущем звене 2 усилие захвата уменьшается с увеличением сечения захвата. Однако соотношение длины звеньев механизмов шарнирных многозвенников подбирается так, что передаточное отношение i от ведущего звена 2 до ведомого звена 4 изменяется так, что сила захвата всегда обеспечивается прямопропорциональной размеру сечения схватываемого предмета. Изменяя соотношение длин звеньев шарнирного четырехзвепника, можно получать требуемую зависимость усилия захвата от размера его сечения. Предмет изобретения 1. Захват, например, для манипуляторов призматической опорой, расположенной симетрично продольной оси корпуса, и с зажимыми губками, соединенными с корпусом поредством шарнирных многозвенников, свяанных с общим приводом, отличающийя тем, что, с целью обеспечения надежного удобного захвата предметов различной форы и размеров, шарнирные многозвенники ыполнены из звеньев разной длины так, что лина их ведущих звеньев больше длины ведомого. 2. Захват по п. 2, отличающийся тем, то привод многозвенников выполнен в виде амотормозящей червячной передачи, червяк оторой расположен внутри корпуса вдоль его
продольной оси, а каждый червячный сектор жестко соединен с ведущим звеном соответствующего миогозвенника. 3. Захват по ни. 1 и 2, отличающийся
тем, что губки выполнены сонрягаемыми, каждая в виде цилиндра с прорезями, ось которого совпадает с осью подвижного шарнира, соединяющего ведомые звенья.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват | 1980 |
|
SU965764A2 |
| Захват | 1975 |
|
SU550280A2 |
| Захват | 1976 |
|
SU558789A1 |
| Захват робота | 1980 |
|
SU889422A1 |
| Захват манипулятора | 1990 |
|
SU1834796A3 |
| Схват манипулятора | 1986 |
|
SU1445951A1 |
| Захват манипулятора | 1979 |
|
SU772843A1 |
| Клещевая подача к горячештамповочному прессу | 1989 |
|
SU1690920A1 |
| Захват промышленного робота | 1980 |
|
SU891435A1 |
| Схват манипулятора | 1985 |
|
SU1348168A1 |

10
J1..4-Si:::if ТГ 1 ±1Ш
j II , -.
; j .,j,.-T I
5-i-S S:
L,f.-T.. (.-. 1 s --- ii .,
.i.,. J
Tife&rpt; I
I ll
r-ib 4i iji Hi-i;- fj /J
/J
