Изобретение относится к электротехнике и может быть использовано для управления угловым положением объекта, в частности с использованием скоростного демпфирующего сигнала. Известен следящий привод с демпфирующими тахогенераторами - Tl. Недостатком известного привода является не плавность слежения и невысокий диапазон регулирования за счет наличия низкочастотных пульсаций в напряжении и тахогенератора. Наиболее близким техническим решением к изобретению является следящий привод, содержащий датчик угла, вал которого соединен с синхронным генератором и кинематически связан с исполнительным двигателем, подключенным-чере усилитель к выходу элемента сравнения, один вход которого через преобразовател кода в напряжение соединен с выходом датчика угла, а второй - с выходом сум матора, связанным с выходами функциональных преобразователей кода в напря- жение, цифровой вход которых соединен с выходом датчика угла 21. Недостаток привода -большая величина переменной (оборотной) составляющей нулевого фона на выходе тахогенератора, вызванного смещением нуля множительных устройств, что ухудшает плавность слежения привода, а также сложность схемы. Цель изобретения - увеличение плавности слежения за счет уменьшения оборотной составляющей нулевого фона и упрощение схемы. Указанная цель достигается тем, что в известном следящем приводе, содержащем исполнительный двигатель, обмотки которого подсоединены к усилителю, а вал кинематически связан с синхронным генератором и датчиком угла, выход которого через преобразователь кода в напряжение подключен к первому входу элемента сравнения, второй вход которого соединен с сумматором, а выход подключен к усилителю, два функциональных пре-
обрааователя,- выходы которых соединены с сумматором, а цифровые входы с выходом датчика угла, введены пва связанных с выходом датчика угла блока коммутаци а обмотки синхронного генератора снабже ны выводами от средних точек, причем концы каждой из упомянутых обмоток через соответствующий блок коммутации связаны с аналоговым входом соответствующего функционального преобразователя кода в напряжение, а выходы средних точек обмоток соединены с общими точками функциональных преобразователей
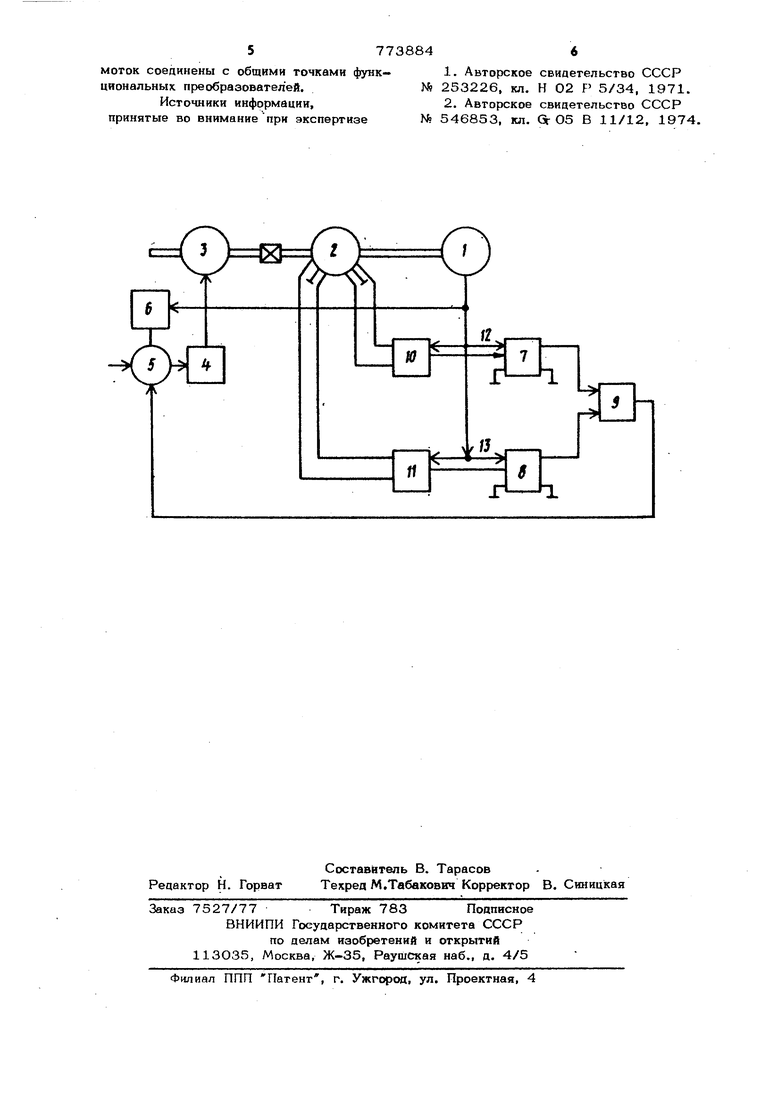
На чертеже представлена схема привода.
Привод содержит датчик 1 угла, синхронный генератор 2, исполнительный двигатель 3, усилитель 4, элемент 5 сравнения, пр,еобразователь 6 кода в напряжение, функциональные преобразователи 7 и 8 кода в напряжение, сумматор 9, блоки 10 и 11 коммутации. Датчик угла 1 и синхронный генератор 2 расположены на одном валу и кинематически связаны с исполнитель- ным двигателем 3, который подключен через усилитель 4 к выходу элемента 5 сравнения, один вход которого через преобразователь 6 кода в напряжение соедич нен с выходом датчика угла, а второй с выходом сумматора 9, Цифровые входы 12 и 13 функциональных преобразователей 7 и- 8 подключены к выходу датчика 1 угла, а их выходы к входам сумматора 9. Аналоговые входы функциональных .преобразователей через блоки 1О и 11 коммутации, связанные с датчиком 1 угла, соединены с выходными обмотками :синхронного генератора, которые снабже ны средними выводами, подключенными к заземленной шин.
Привод работает следующим образом.
При подаче на элемент сравнения управляющего сигнала привод приводится во вращение. Сигналы с выхода датчика
угла 1 в виде цифрового кода поступают на цифровые входы, функциональных преобразователей, на аналоговые входы которых поступают выходные напряжения синхронного генератора
,,. dot ,.doc
U K-SHnoO-j;) U - k-cosot-j
Выходные напряжения функциональных преобразователей 7 и 8 соответственно определяются выражениями
, Ug U -lcosool Для того, чтобы выходное напряжение и7 меняло полярность при изменении угла0 в диапазоне ISO эл. QI. эл., а (Jg в диапазоне 9О эл, QL 27О эл, блоки коммутации переключают концы обмоток синхронного генератора по сигналам старших разрядов кода. Тогда (с учетом действия блоков коммутации). ,
U iJ Qino6 K s-(
Ug UjCosa (X
На выходе сумматора получается напряжение
и
Величина выходного напряжения пропорциональна мгновенной скорости вращения, а знак (полярность) определяется направлением (знаком) скорости. Поскольку оно не содержит пульсаций (прежде всего оборотных, частота которых пропорциональна частоте вращения), то использование этого напряжения для демпфирования привода дает возможность повысить плавность вращения привода, особенно на низких скоростях вращения. Кроме того, исключение сложных множительных устройств позволило упростить схему прив.ода.
Формула изобретения
Следящий электропривод, содержащий исполнительный двигатель, обмотки .которого подсоединены к усилителю, а вал кинематически связан с синхронным генератором, снабженным выходными обмотками и датчиком угла, выход которого через преобразователь код-напряжение подключен к первому входу элемента сравнения, второй вход которого соединен с сумматором, а выход подключен к усилителю, два других функциональных преобразователя код-напряжение, выходы которых соединены с сумматором, а цифровые входы с выходом датчика угла, отличающийся тем, что, с целью увеличения плавности слежения и упрощения схемы, введены два связанных с выходом датчика угла блока коммутации, а обмотки синхронного генератора снабжены выводами .от средних точек, причем концы каждой из упомянутых обмоток через соответствующий блок коммутации связаны с аналоговым входом соответствующего функционального преобразователя кода в напряжение, а выходы средних точек об-
5773884
моток соединены с общими точками функциональных преобразователей.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 253226, кл. Н 02 Р 5/34, 1971.
2.Авторское свидетельство СССР
№ 546853, кл. С3г05 В 11/12, 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| Бесконтактный реверсивный тахогенератор постоянного тока | 1976 |
|
SU552663A1 |
| Цифро-аналоговая следящая система | 1985 |
|
SU1282328A1 |
| ПРИВОД ПЕРЕМЕЩЕНИЯ | 1993 |
|
RU2072545C1 |
| ЦИФРОВОЙ ЭЛЕКТРОПРИВОД | 2009 |
|
RU2404449C1 |
| Безредукторный бесконтактный следящий электропривод | 1981 |
|
SU1001412A1 |
| Следящий привод | 1975 |
|
SU546853A1 |
| Вентильный двигатель | 1980 |
|
SU892594A1 |
| Вентильный электродвигатель | 1981 |
|
SU995216A1 |
| Устройство для управления шаговым электродвигателем | 1980 |
|
SU936340A1 |
| АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 1996 |
|
RU2115229C1 |
