(54) ПЕРЕДВИЖНЫЕ ПОДМОСТИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Передвижные подмости | 1975 |
|
SU532683A1 |
| ПОДМОСТИ ПОДВЕСНЫЕ | 2003 |
|
RU2250322C2 |
| Передвижные подмости | 1979 |
|
SU912881A1 |
| Устройство для монтажа блоков пролетных строений мостов | 1977 |
|
SU732434A1 |
| Подмости | 1990 |
|
SU1776739A1 |
| ПОДЪЕМНИК | 1993 |
|
RU2061648C1 |
| Прибор для определения качества хлопка по длине его волокна | 1929 |
|
SU24671A1 |
| Подъемные подмости для возведения железобетонных оболочек дымовых труб, градирен и тому подобных сооружений | 1975 |
|
SU530094A1 |
| ПЕРЕХОДНАЯ ПЛАТФОРМА | 1997 |
|
RU2136575C1 |
| Передвижные складные подмостки | 1976 |
|
SU822764A3 |
Изобретение относится к области строительства и предназначено преимущественно для возведения новых, реконструкции и ремонта существующи высотных сооружений, например фабрйчно-эаводских труб, колонн, опор мостов, башен и т.п. Известна рабочая площсщка подмостей, расположенная в пределах отверстия трубы, которая по мере изменения диаметра отверстия может менять свои размеры при помощи механизма для раздвижения подмостей. Под емное устройство в виде домкратов, расположено также в пределах отверстия трубы. Закрепление подмостей на сооружении осуществляется опиранием выступов домкратов на. стенки трубы. В местах расположения выступов, в стенках трубы оставляются гнезда, ко торые заделываются с вспомогательно площадки в процессе кладки трубы 1 OcHOBHfciiM недостатком этого устройства являются весьма ограниченная область применения,-т.е. использование их при строительстве труб, которые имеют размер отверстия, позволяющий разместить в нем рабочую .площадку с механизмами. Известна также рабочая площадка, включающая верхнюю и нижнюю горизонтальные площадки, стойки и механизмы ее закрепления и вертикального перемещения 2 . Недостатком данного устройства является сложность конструктивного выполнения механизмов закрепления и вертикального перемещения, выполненных в виде опорно-кулачковых устройств и червячных передач. Целью изобретения является упрощение конструкции подмостей. Указанная цель достигается тем, что в передвижных подмостях, содержащих верхнюю и нижнюю горизонтальные площадки, стойки, механизмы закрепления подмостей и их вертикаль,ного перемещения, механизм закрепле ния подмостей выполнен из свободно прикрепленных эксцентриков,при этом диги етрально противоположные эксцентрики верхней и нижней площадок соединены с механизмом вертикального перемещения, выполненным из шарнирно прикрепленных к нижней площадке ручек управления, соединенных с ними рычагов, одарнирно связанных с эксцентриками и установленных на верхней площадке с возможностью вертикального перемещения тяг, связанных с эксцентриками, причём сочленение рычагов с ручками управления выполнено кулисным. При этом стойки подмостей могут быть выполнены телескопическими, а для обеспечения гарантированного эксцентрики снабжены противовесами .
.Также на эксцентриках могут быть закреплены обеды из плотной резины или корда,
Ось поворота эксцентриков располагается так, что эксцентрики, соприкасаясь с поверхностью сооружения, могут передвигаться по ней только вверх. При движении вниз расстояние от оси вращения эксцентрика до точ.ки соприкасания с поверхностью сооружения постепенно увеличивается, в результате чего эксцентрики заклиниваются и вся система подмостей самозакрепляется на сооружении.
Количество и размеры эксцентриков принимаются в зависимости от грузоподъемности подмостей и размеров поперечного сечения сооружения.
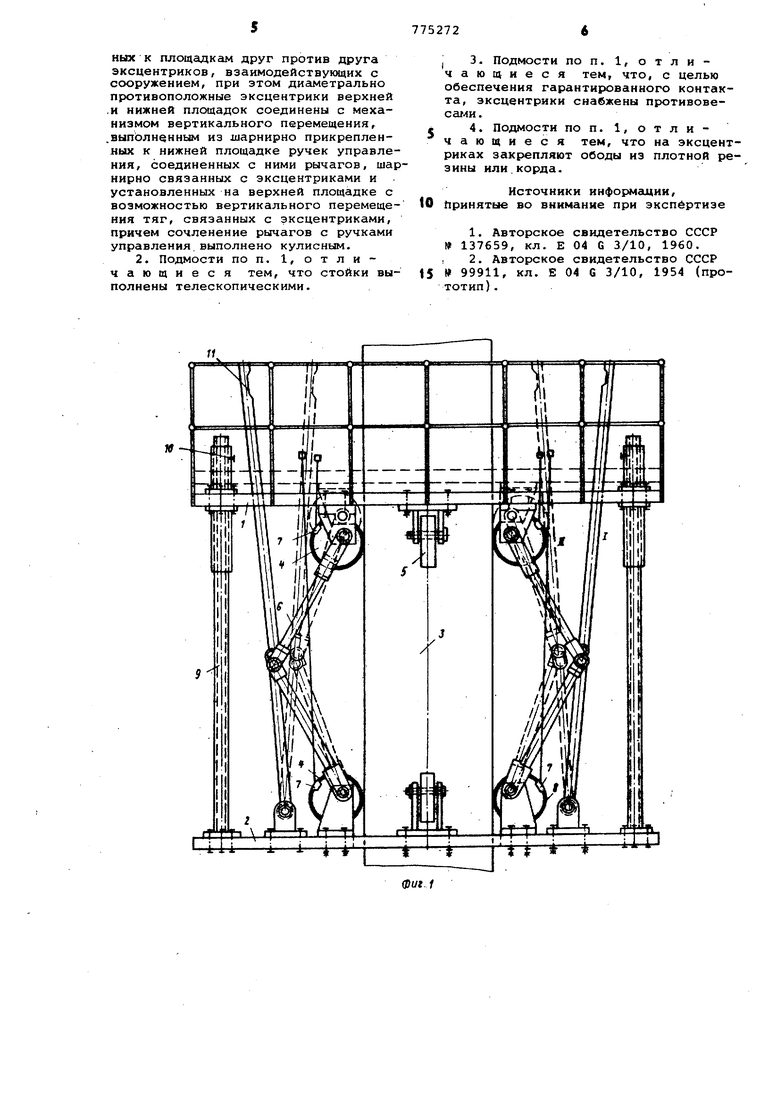
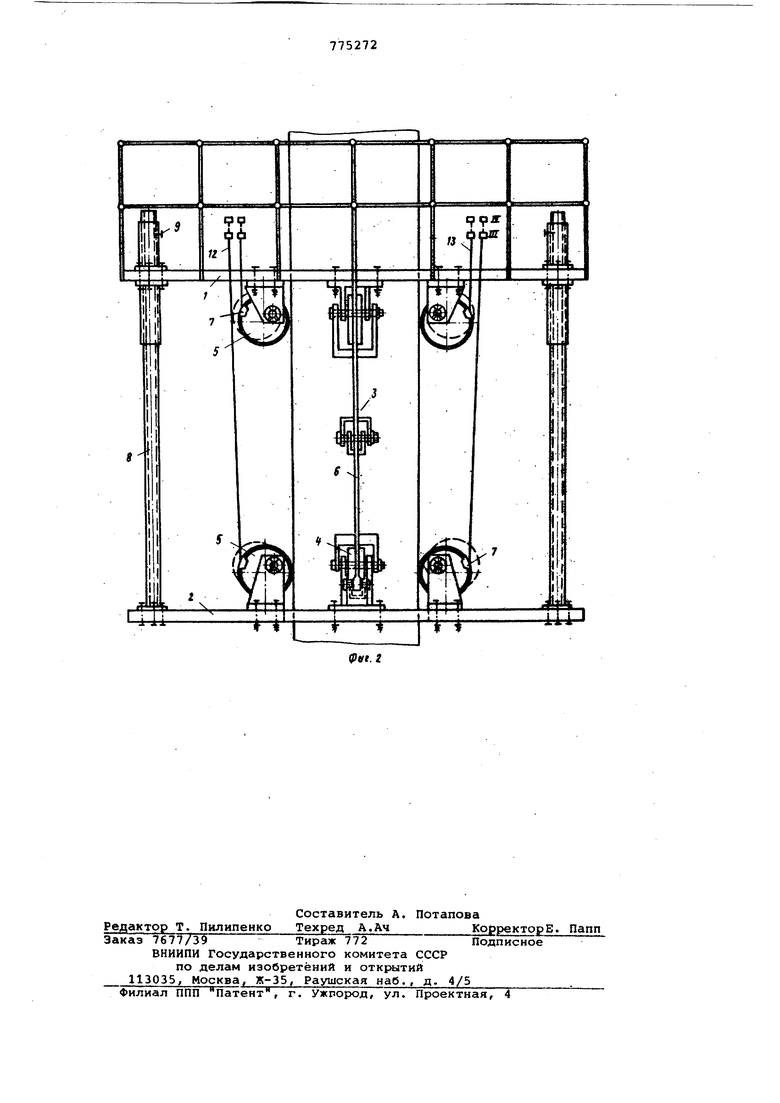
На фиг. 1 показаны подмости, общий вид; на фиг. 2 - то же, .вид сбоку.
Вертикально передвижные подмости состоят из следующих основных элементов: верхней (рабочей) 1 и нижней (упорной) 2 горизонтальных площадок, объемлющих сооружение 3.
Механизм закрепления подмостей выполнен из закрепленных к площадкам свободно поворачивающихся эксцентриков 4 и 5, представляющих собой диск или часть диска, ось поворота которого не совпадает -с его геометрической осью. Благодаря эксцентричному расположению оси вращения эксцентрики постоянно соприкасаются с поверхностью сооружения, даже если сооружение имеет коническую форму или на его поверхности имеются незначительные выступы или впадины.
Эксцентрики 4 соединены механизмом 6 вертикального перемещения, а эксцентрики 5 с ним не связаны.
Для обеспечения лучшего и постоянного сцепления с сооружением в хвостовой части эксцентриков установлен противовес 7, поверхность эксценриков делается шероховатой, а в случае особо гладкой поверхности стенок сооружения, (например, металлическая труба или колонна) на эксцентрик одевается обод 8 иэ плотной резины или корда.
Площадки соединены телескопическими направляющими стойками 9, закрепляемыми стопорным винтом 10.
Механизм 6 вертикального перемещения представляет собой рычажно-шарнирную систему металлических линейны элементов (рычагов) шарнирно соединенных между собой и с осями вращения эксцентриков 4 и кулисно соединенных с шарнирно закрепленной на ни;ней площадке 2 ручкой 11 управления. Конец ручки 11 находится над поверхностью рабочей площадки 1, там же установлены связанные с эксцентриками , тяги 12 и 13.
Вертикальное передвижение подмостей осуществляется путем перемещения ручки управления поочередно в положение t и положение II.
Поочередное отключение эксцентриков верхней или нижней платформы и перемещение подмостей вниз может осуществляться, напримерj с помощью тяг 12 и 13 (см. фиг. 2). Нижний конец тяг шарнирно соединен с хвостовой частью каждого эксцентрика, а верхний - расположен над рабочей площадкой. Для перемещения подмостей вниз тяги 12 нижней платформы переводится из положения 111 в положение IV, при этом отключаются все нижние эксцентрики, нагрузка передается через рычажную систему на верхнюю площадку 1, неподвижно закрепленную на сооружении 3.
Расстояние между верхними и нижними эксцентриками увеличивается, так как нижняя платформа опускается, при этом ручки 11 управления перемещаются из положения I в положение tI.
После опускания нижней площадки тяги 12 из положения IV переводятся в положение III, при этом включаются нижние эксцентрики и нижняя площадка закрепляется на сооружении 3.
После закрепления нижней площащки на сооружении тяги 13 верхней площадки переводятся из положения III в положение IV, при этом отключаются все верхние эксцентрики и вся нагрузка передается также через рычажную систему 6 на нижнюю площадку. Расстояние между верхними и нижними эксцентриками уменьшается, так как верхняя площадка опускается, при этом ручка 11 управления перемещается из положения I1 в положение I.
После опускания верхней площадки тяги 13 переводятся в обратное положение, при этом включаются верхние эксцентрики и верхняя платформа закрепляется на сооружении.
Таким образом, при поочередном включении и отключении нижних и верхних эксцентриков соответственно поочередно опускаются верхняя и нижняя площадки.
Формула изобретения
, 3. Подмости по п. 1, отличающиеся тем, что, с целью обеспечения гарантированного контакта, эксцентрики снабжены противовесами .
Источники информации, принятые во внимание при экспертизе
t1
V
